Search Results (Searched for: )
- rodw

08 Feb 2026 21:15
Replied by rodw on topic Considering a Full Rewire on a Working Schaublin 125 CNC
Considering a Full Rewire on a Working Schaublin 125 CNC
Category: Turning
") Nice progress.
Nice progress.- rodw
08 Feb 2026 21:04
Replied by rodw on topic Technical questions about CIA402 and homecomp.comp on A6
Technical questions about CIA402 and homecomp.comp on A6
Category: EtherCAT
- mooser
- mooser
08 Feb 2026 20:07
Replied by mooser on topic Adding Feed Rate (IPM or IPR) to the lathe screen
Adding Feed Rate (IPM or IPR) to the lathe screen
Category: AXIS
- andrax

08 Feb 2026 20:01
- Finngineering
- Finngineering
08 Feb 2026 19:59
Replied by Finngineering on topic XHC WHB04B development?
XHC WHB04B development?
Category: General LinuxCNC Questions
- markbaenen
- markbaenen
08 Feb 2026 19:34
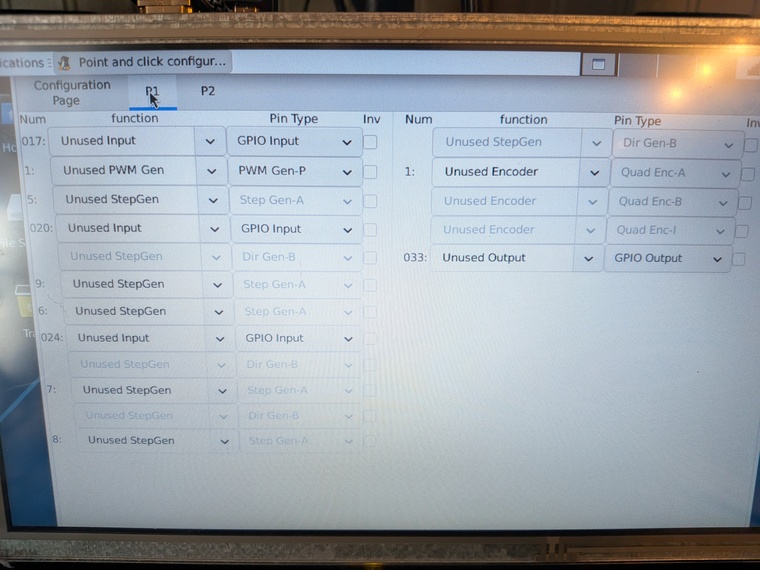
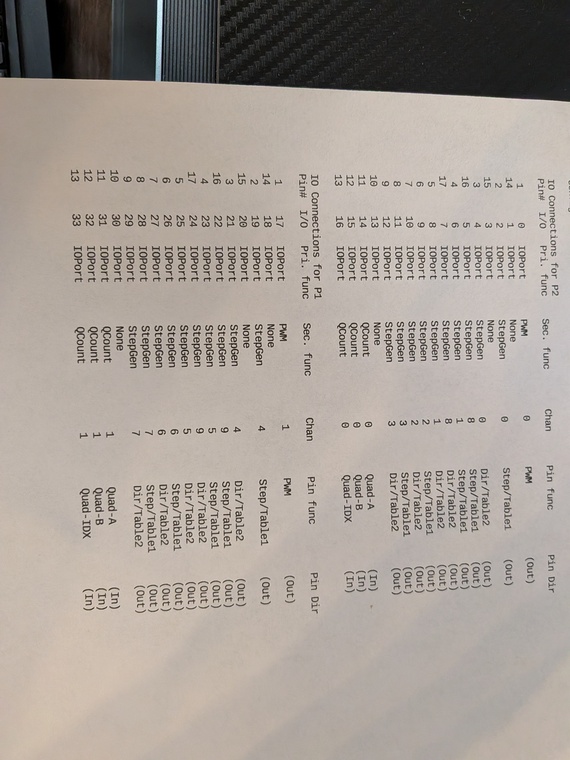
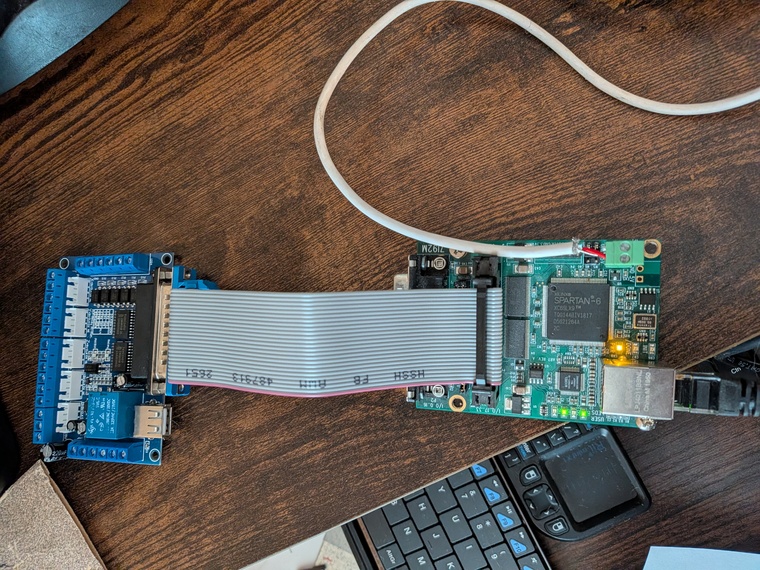
Configuration Problems 7i92 PnCConf was created by markbaenen
Configuration Problems 7i92 PnCConf
Category: PnCConf Wizard
- DerKlotz
- DerKlotz
08 Feb 2026 19:20
- BIBIGUL
- BIBIGUL
08 Feb 2026 19:19 - 08 Feb 2026 19:32
- tommylight

08 Feb 2026 19:07
- bobwolf
- bobwolf
08 Feb 2026 18:56
Replied by bobwolf on topic Solving the USB Latency Dogma for HMI/MPG: Technical Feedback Request
Solving the USB Latency Dogma for HMI/MPG: Technical Feedback Request
Category: Driver Boards
- andypugh

08 Feb 2026 18:46
Replied by andypugh on topic Cannot JOG Plus/Minus move in TeleOp mode
Cannot JOG Plus/Minus move in TeleOp mode
Category: Basic Configuration
- NT4Boy
- NT4Boy
08 Feb 2026 18:42
Replied by NT4Boy on topic HURCO KMB-1 Control Update
HURCO KMB-1 Control Update
Category: Milling Machines
- andypugh
08 Feb 2026 18:32
- amanker
- amanker
08 Feb 2026 18:28
Replied by amanker on topic Remora - Rpi Software Stepping Using External Microcontroller via SPI
Remora - Rpi Software Stepping Using External Microcontroller via SPI
Category: Computers and Hardware
- andypugh
08 Feb 2026 18:23
Time to create page: 0.581 seconds