Search Results (Searched for: )
- tcbmetalworks
- tcbmetalworks
21 Jul 2026 02:59
Thcad-10 getting more and more jumpy was created by tcbmetalworks
Thcad-10 getting more and more jumpy
Category: Plasmac
- kanesl
- kanesl
21 Jul 2026 02:57
- ihavenofish
- ihavenofish
21 Jul 2026 02:29
Replied by ihavenofish on topic Mini wannabe datron build
Mini wannabe datron build
Category: CNC Machines
- rhscdn
- rhscdn
21 Jul 2026 01:54
Replied by rhscdn on topic lcncgui simple web based linuxcnc GUI
lcncgui simple web based linuxcnc GUI
Category: Other User Interfaces
- tommylight

20 Jul 2026 23:39
- PCW

20 Jul 2026 21:59
Replied by PCW on topic STMBL Driver DC Bus Options
STMBL Driver DC Bus Options
Category: Milling Machines
- 5_Zylinder
- 5_Zylinder
20 Jul 2026 21:42
- d12k6
- d12k6
20 Jul 2026 21:35 - 20 Jul 2026 21:45
Replied by d12k6 on topic ColorCNC Colorlight 5A-75E/5A-75B as FPGA controller board
ColorCNC Colorlight 5A-75E/5A-75B as FPGA controller board
Category: Driver Boards
- PCW
20 Jul 2026 21:10
Replied by PCW on topic Parallel Port - how to invert PWM value
Parallel Port - how to invert PWM value
Category: Installing LinuxCNC
- PCW
20 Jul 2026 20:42
- rodw

20 Jul 2026 20:33
- galmiklos
- galmiklos
20 Jul 2026 19:49
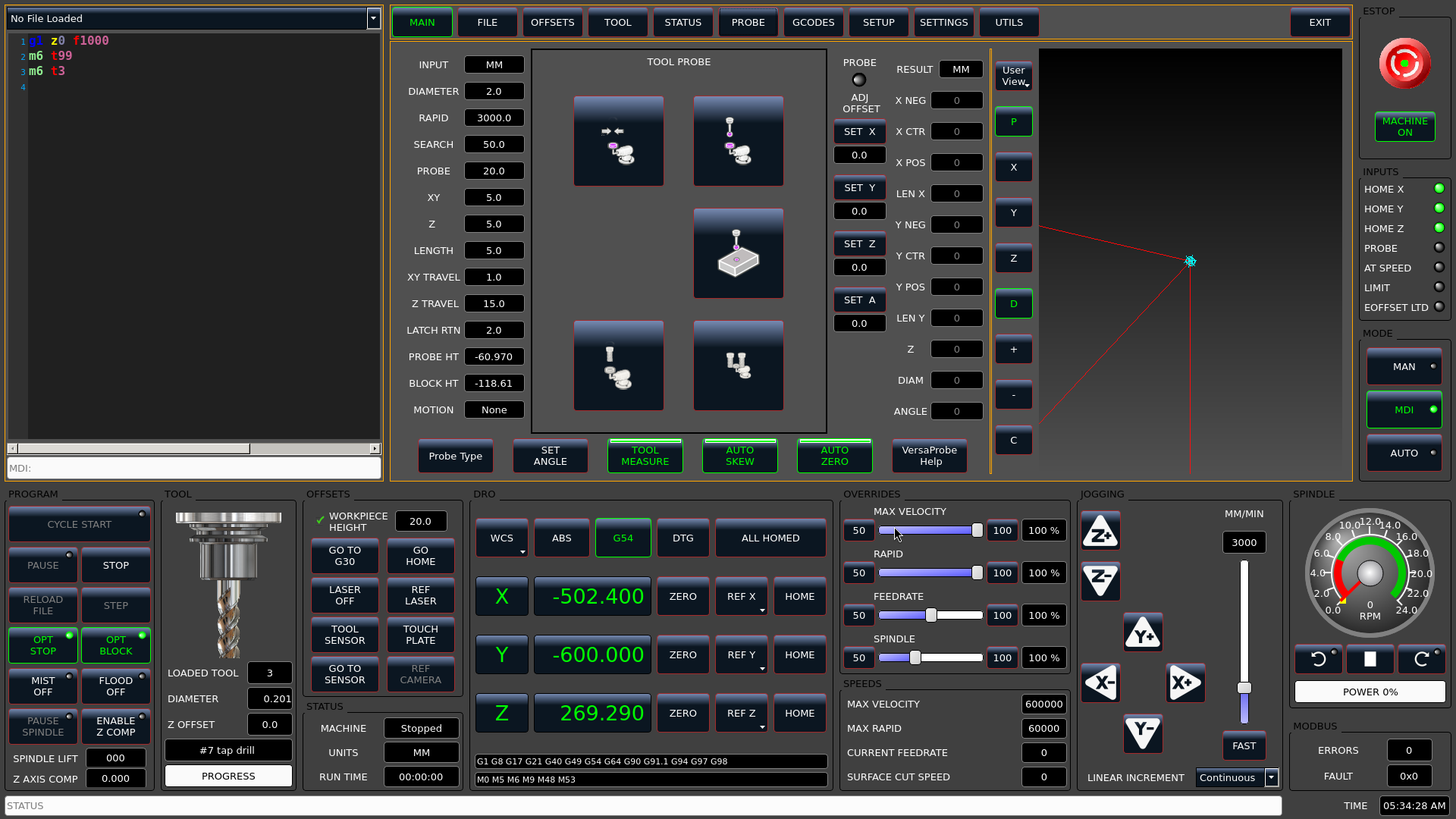
"Probe Height of the current tool" button not active in versatool was created by galmiklos
"Probe Height of the current tool" button not active in versatool
Category: Qtvcp
- Todd Zuercher

20 Jul 2026 19:11 - 20 Jul 2026 19:12
Replied by Todd Zuercher on topic Parallel Port - how to invert PWM value
Parallel Port - how to invert PWM value
Category: Installing LinuxCNC
- NWE

20 Jul 2026 18:34
- RotarySMP

20 Jul 2026 18:33
Replied by RotarySMP on topic Gmoccapy tool table not accepting lathe tool angles...
Gmoccapy tool table not accepting lathe tool angles...
Category: Gmoccapy
Time to create page: 0.282 seconds