Search Results (Searched for: )
- MaHa
- MaHa
12 Dec 2025 22:24 - 13 Dec 2025 01:21
- Fastfred
- Fastfred
12 Dec 2025 21:34
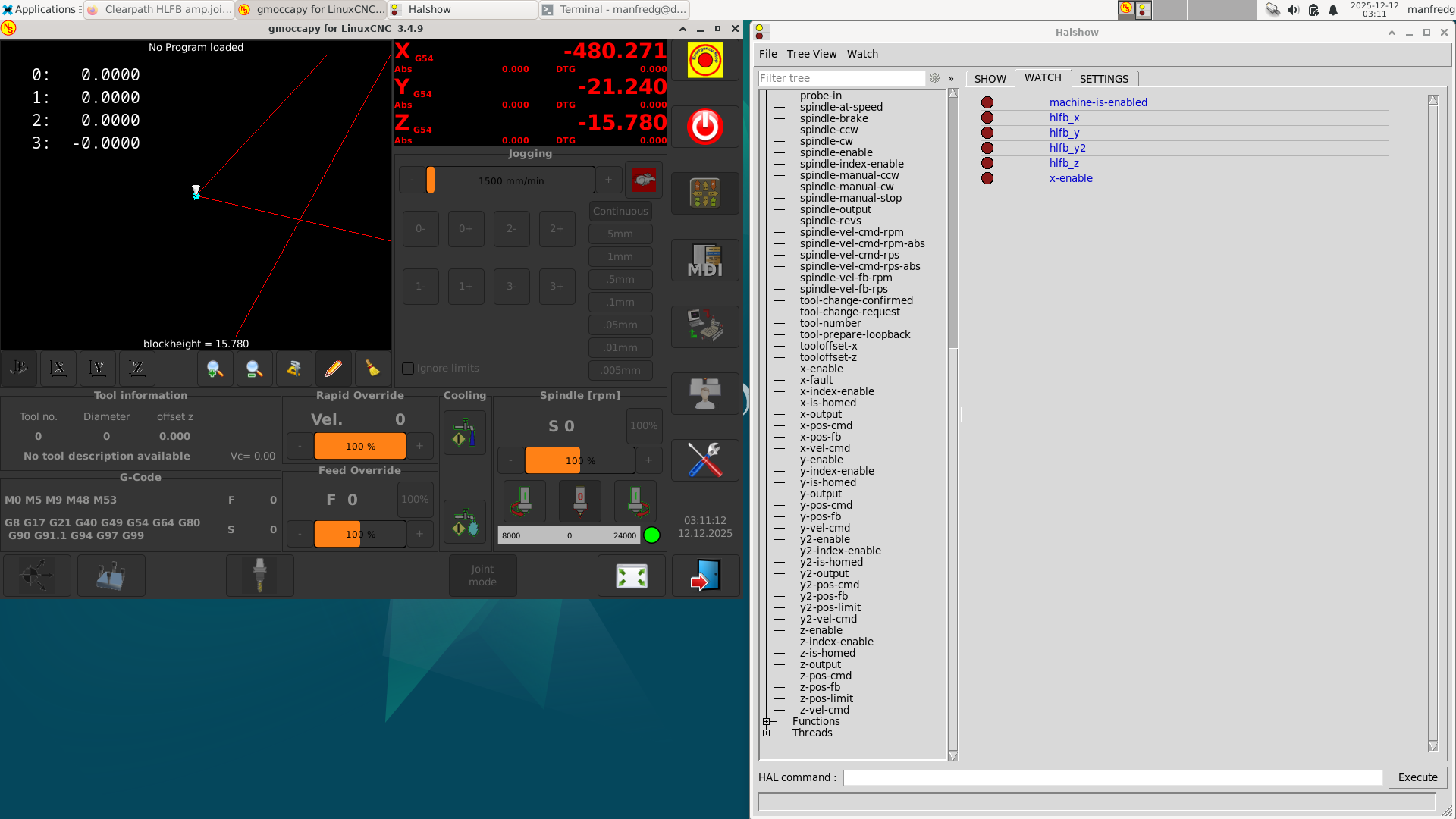
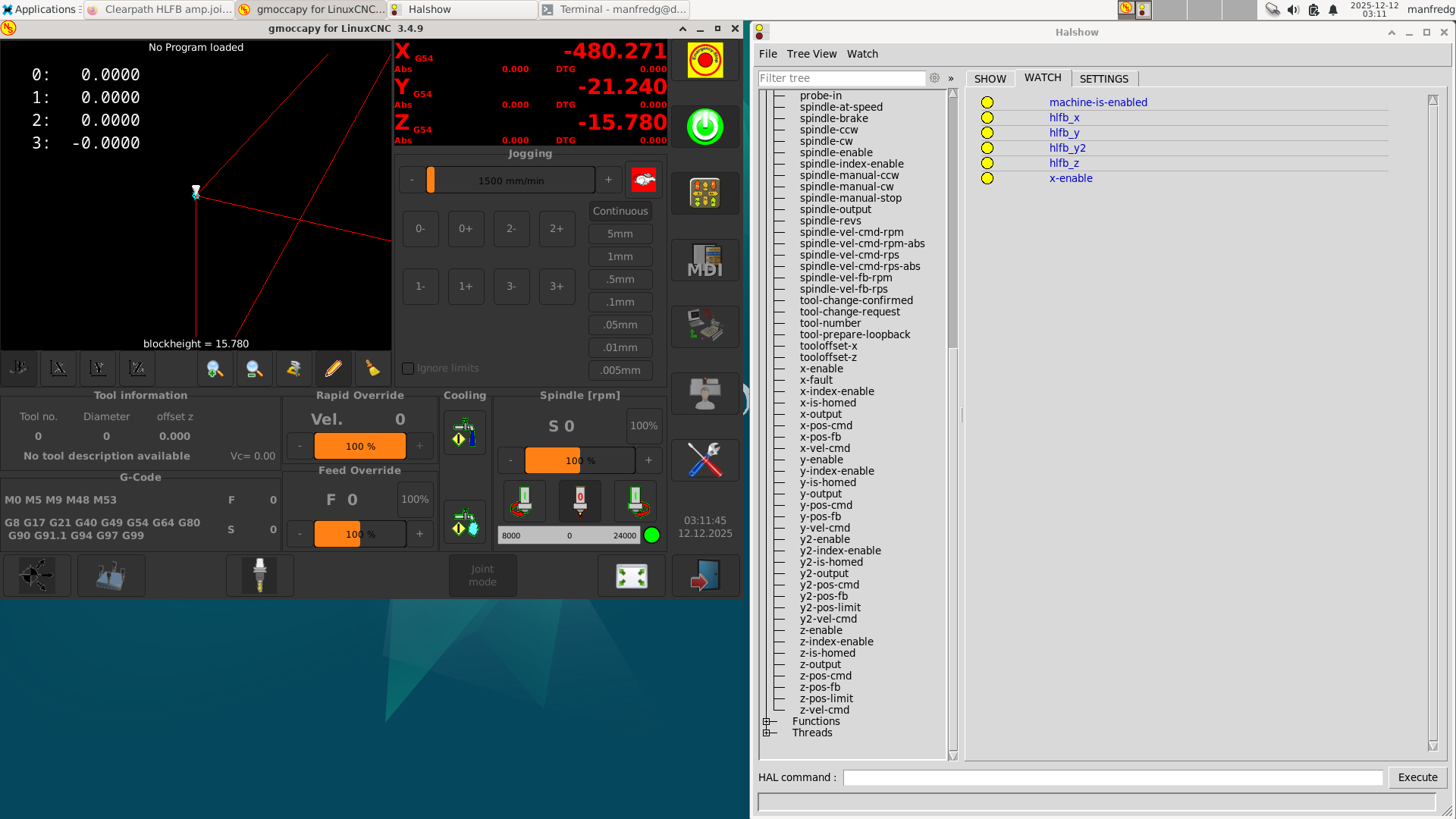
Replied by Fastfred on topic Clearpath HLFB amp.joint.delay
Clearpath HLFB amp.joint.delay
Category: HAL
- Masiwood123

12 Dec 2025 20:59
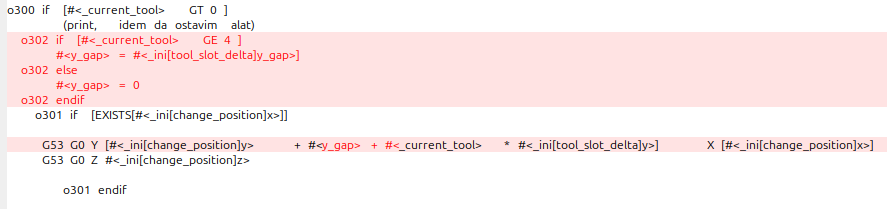
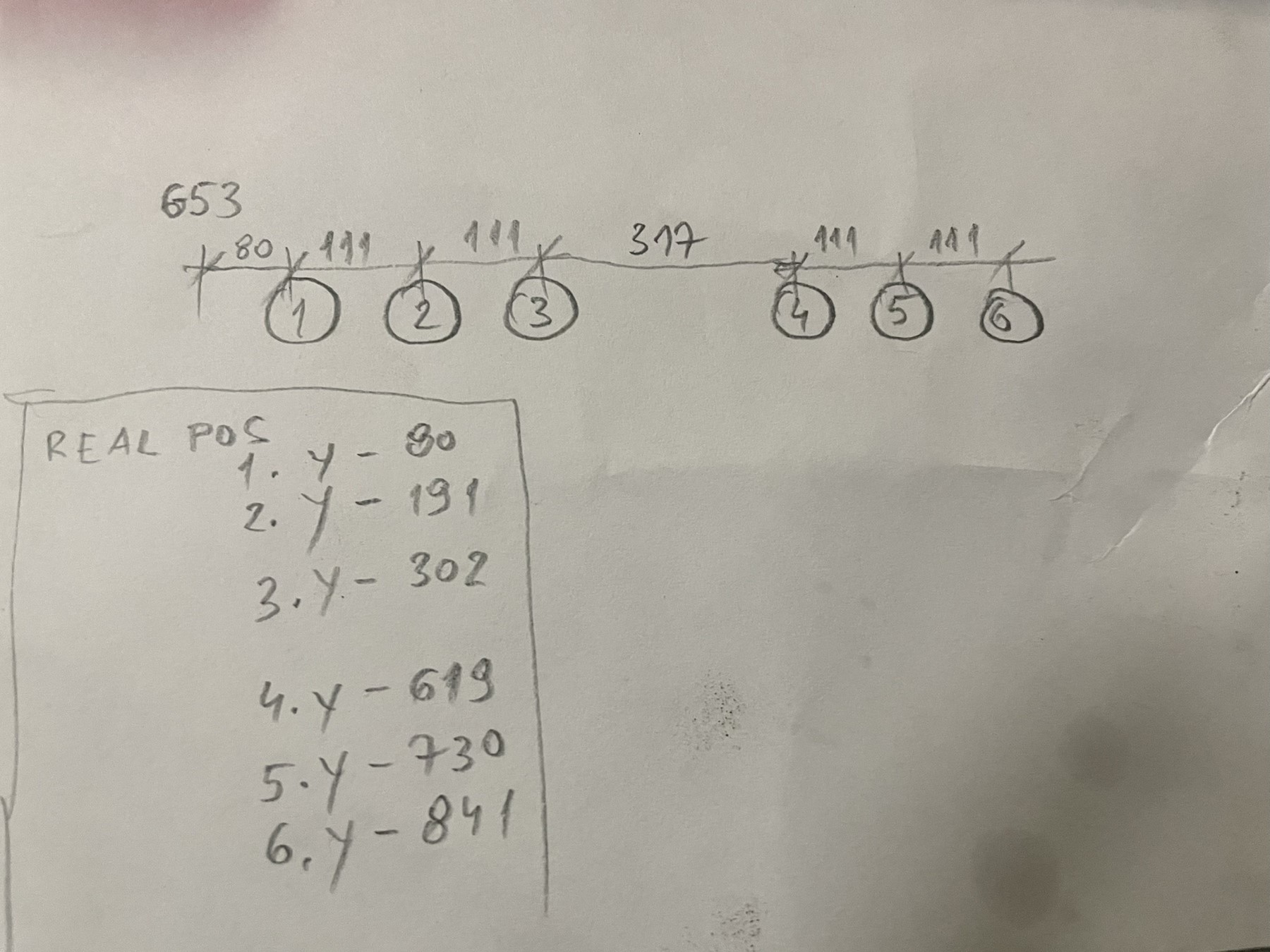
Replied by Masiwood123 on topic freelancer needed to create a routine for ATC tool change (rackchange)
freelancer needed to create a routine for ATC tool change (rackchange)
Category: Advanced Configuration
- rodw

12 Dec 2025 20:43
- vibram
- vibram
12 Dec 2025 20:29
Replied by vibram on topic Ethercat compatible Encoder board tentative STM32F4 + LAN9252
Ethercat compatible Encoder board tentative STM32F4 + LAN9252
Category: EtherCAT
- rodw
12 Dec 2025 20:10 - 12 Dec 2025 20:15
Replied by rodw on topic Long initialization of Ethercat on servo drive SV660N
Long initialization of Ethercat on servo drive SV660N
Category: EtherCAT
- NWE

12 Dec 2025 19:52 - 12 Dec 2025 21:34
- Masiwood123
12 Dec 2025 19:45
Replied by Masiwood123 on topic Physical buttons to 7i96s+7i77
Physical buttons to 7i96s+7i77
Category: HAL
- Fastfred
- Fastfred
12 Dec 2025 19:22
Replied by Fastfred on topic Clearpath HLFB amp.joint.delay
Clearpath HLFB amp.joint.delay
Category: HAL
- T_D
- T_D
12 Dec 2025 19:13
Replied by T_D on topic Mesa konfiguration Maho 500 W4
Mesa konfiguration Maho 500 W4
Category: Driver Boards
- Masiwood123
12 Dec 2025 18:36
Replied by Masiwood123 on topic freelancer needed to create a routine for ATC tool change (rackchange)
freelancer needed to create a routine for ATC tool change (rackchange)
Category: Advanced Configuration
- gravedigger
- gravedigger
12 Dec 2025 18:31
Replied by gravedigger on topic stepgen maxvel too big and SRO problem
stepgen maxvel too big and SRO problem
Category: Gmoccapy
- Ismacr63
- Ismacr63
12 Dec 2025 18:25
- Masiwood123
12 Dec 2025 17:14 - 12 Dec 2025 17:29
Replied by Masiwood123 on topic freelancer needed to create a routine for ATC tool change (rackchange)
freelancer needed to create a routine for ATC tool change (rackchange)
Category: Advanced Configuration
- tommylight

12 Dec 2025 16:12
Time to create page: 1.658 seconds