Search Results (Searched for: raspberry)
- unknown
- unknown
26 Mar 2025 21:03
Replied by unknown on topic Linuxcnc & the Raspberry Pi (4 & 5) Official Images Only!!!
Linuxcnc & the Raspberry Pi (4 & 5) Official Images Only!!!
Category: Installing LinuxCNC
- tommylight

26 Mar 2025 17:20
Replied by tommylight on topic Linuxcnc & the Raspberry Pi (4 & 5) Official Images Only!!!
Linuxcnc & the Raspberry Pi (4 & 5) Official Images Only!!!
Category: Installing LinuxCNC
- tommylight
26 Mar 2025 17:19
Replied by tommylight on topic Linuxcnc & the Raspberry Pi (4 & 5) Official Images Only!!!
Linuxcnc & the Raspberry Pi (4 & 5) Official Images Only!!!
Category: Installing LinuxCNC

26 Mar 2025 16:52
- atrex77

26 Mar 2025 13:10 - 26 Mar 2025 13:11
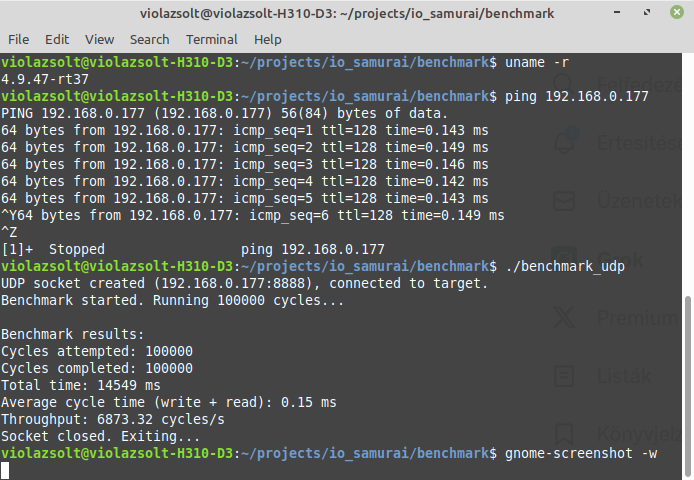
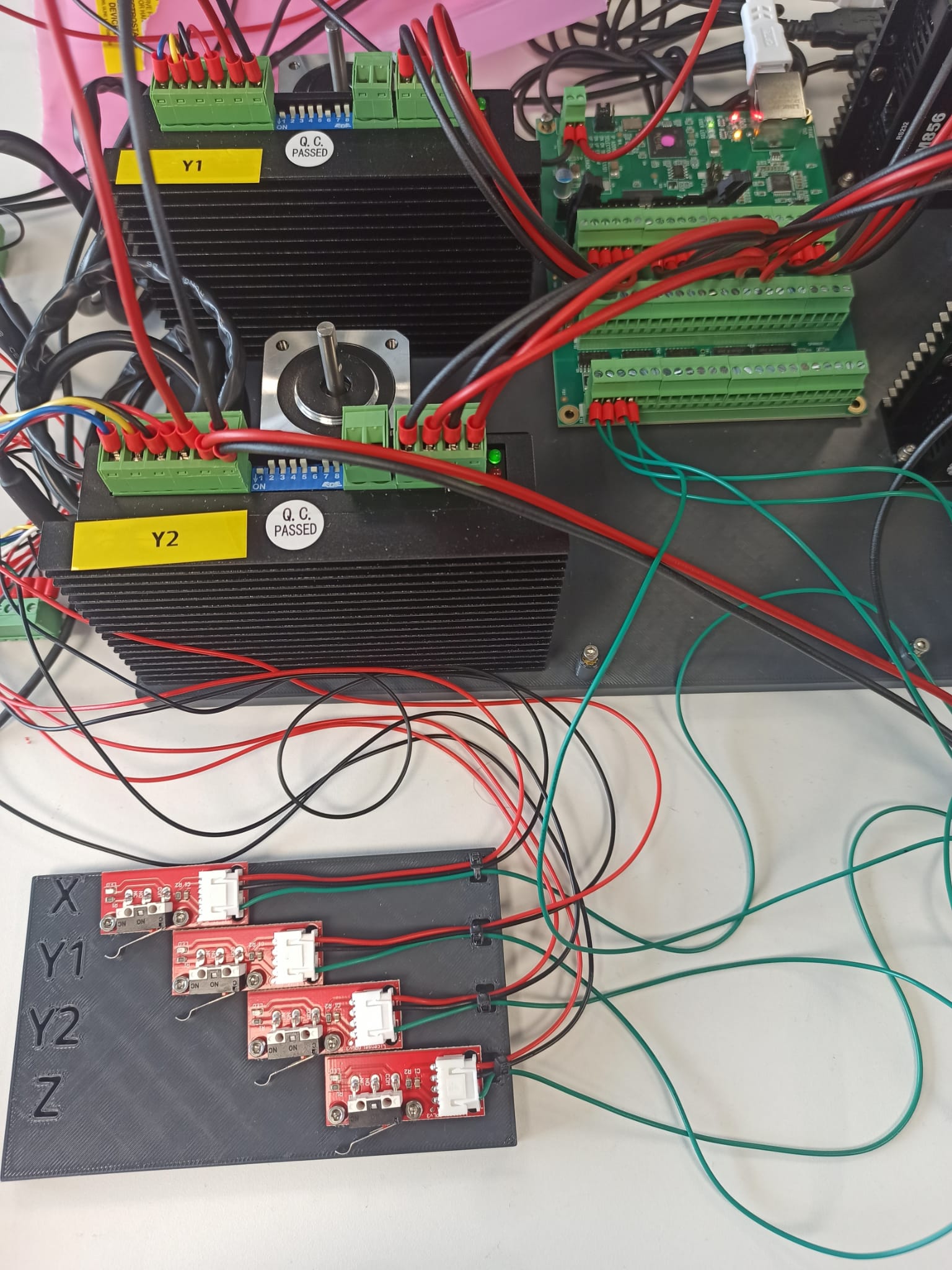
Replied by atrex77 on topic Developing a Raspberry Pi Pico-based I/O Board for LinuxCNC
Developing a Raspberry Pi Pico-based I/O Board for LinuxCNC
Category: General LinuxCNC Questions
- Z3rni3
- Z3rni3
26 Mar 2025 12:54
- faeluke

25 Mar 2025 19:09
Replied by faeluke on topic Raspberry Pi 4 and bad latency.. SOLUTIONS?
Raspberry Pi 4 and bad latency.. SOLUTIONS?
Category: Installing LinuxCNC
- tommylight
25 Mar 2025 17:42
Replied by tommylight on topic Raspberry Pi 4 and bad latency.. SOLUTIONS?
Raspberry Pi 4 and bad latency.. SOLUTIONS?
Category: Installing LinuxCNC
- faeluke
25 Mar 2025 17:39
Replied by faeluke on topic Raspberry Pi 4 and bad latency.. SOLUTIONS?
Raspberry Pi 4 and bad latency.. SOLUTIONS?
Category: Installing LinuxCNC
- Z3rni3
- Z3rni3
25 Mar 2025 10:35
Problem with Limit switches was created by Z3rni3
Problem with Limit switches
Category: General LinuxCNC Questions
- looping
- looping
24 Mar 2025 08:11
Replied by looping on topic Trying out LinuxCNC on Raspberry PI5
Trying out LinuxCNC on Raspberry PI5
Category: General LinuxCNC Questions
- elovalvo
- elovalvo
24 Mar 2025 06:21
Replied by elovalvo on topic Trying out LinuxCNC on Raspberry PI5
Trying out LinuxCNC on Raspberry PI5
Category: General LinuxCNC Questions
- rodw

24 Mar 2025 03:31
Replied by rodw on topic Trying out LinuxCNC on Raspberry PI5
Trying out LinuxCNC on Raspberry PI5
Category: General LinuxCNC Questions
- tommylight
23 Mar 2025 22:31
Replied by tommylight on topic Raspberry Pi 4 and bad latency.. SOLUTIONS?
Raspberry Pi 4 and bad latency.. SOLUTIONS?
Category: Installing LinuxCNC
- hitchhiker
- hitchhiker
23 Mar 2025 21:58
Replied by hitchhiker on topic Raspberry Pi 4 and bad latency.. SOLUTIONS?
Raspberry Pi 4 and bad latency.. SOLUTIONS?
Category: Installing LinuxCNC
Time to create page: 0.593 seconds