PathPilot 2.0.2 adding rtlib's
- Stigoe
- Offline
- Senior Member
-

Less
More
- Posts: 60
- Thank you received: 8
25 Apr 2018 15:31 - 25 Apr 2018 15:38 #109598
by Stigoe

So does adding two instances of a component.
Replied by Stigoe on topic PathPilot 2.0.2 adding rtlib's
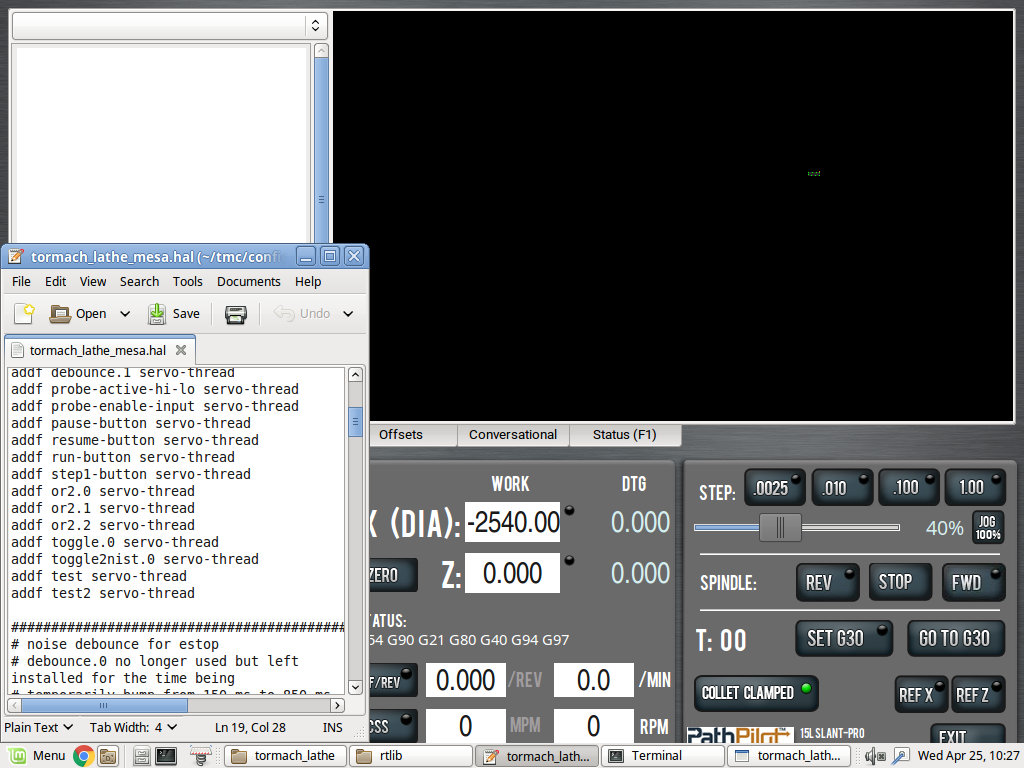
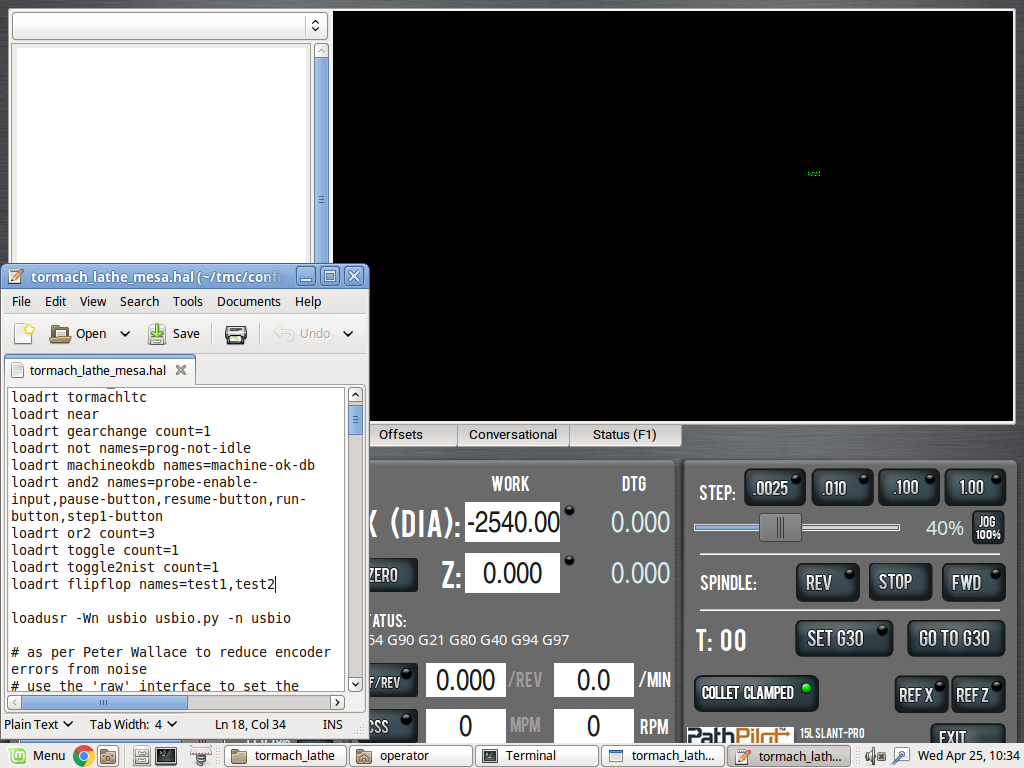
Works for me.Can you try with flipflop? I can confirm all rtlibs can load with "count=n" parameter but if using "names", addf function will not work after.
So does adding two instances of a component.
Last edit: 25 Apr 2018 15:38 by Stigoe. Reason: Adding another example
The following user(s) said Thank You: emptyhb
Please Log in or Create an account to join the conversation.
- emptyhb
- Offline
- Junior Member
-

Less
More
- Posts: 25
- Thank you received: 2
25 Apr 2018 17:41 #109601
by emptyhb
Replied by emptyhb on topic PathPilot 2.0.2 adding rtlib's
@Stigoe:
You got an email, i don't know what step am i missing for compile rtlibs.
You got an email, i don't know what step am i missing for compile rtlibs.
Please Log in or Create an account to join the conversation.
- Stigoe
- Offline
- Senior Member
-
Less
More
- Posts: 60
- Thank you received: 8
25 Apr 2018 18:09 #109603
by Stigoe
Replied by Stigoe on topic PathPilot 2.0.2 adding rtlib's
Hi.
Yes, I saw it right now. I don't know which steps you are missing, as I don't know what you have done and what you haven't done. How I did it, was how I described in an earlier post. All included HAL components were actually compiled when LCNC was compiled, which I noticed two days ago. They reside in [LinuxCNC-folder]/rtlib.
I'll see if I can redo the whole thing and take some screenshots during the process in a couple of days.
If you'd like, I can send you the files, if you say which ones you need.
Yes, I saw it right now. I don't know which steps you are missing, as I don't know what you have done and what you haven't done. How I did it, was how I described in an earlier post. All included HAL components were actually compiled when LCNC was compiled, which I noticed two days ago. They reside in [LinuxCNC-folder]/rtlib.
I'll see if I can redo the whole thing and take some screenshots during the process in a couple of days.
If you'd like, I can send you the files, if you say which ones you need.
Please Log in or Create an account to join the conversation.
- emptyhb
- Offline
- Junior Member
-
Less
More
- Posts: 25
- Thank you received: 2
25 Apr 2018 18:23 - 25 Apr 2018 18:23 #109604
by emptyhb
Replied by emptyhb on topic PathPilot 2.0.2 adding rtlib's
Here's all step i'm doing:
1. Make folders in home directory by structure:2. Clone linuxcnc3. Build linuxcnc4. After build completed, copies missing rtlibs from linuxcnc/rtlibs to ~/tmc/rtlibs
1. Make folders in home directory by structure:
repos/tormach_linuxcnc $:cd repos/tormach_linuxcnc/
$:git clone git://github.com/linuxcnc/linuxcnc.git linuxcnc $:cd linuxcnc/src
$:./autogen.sh
$:./configure --with-realtime=uspace
$:make
Last edit: 25 Apr 2018 18:23 by emptyhb.
Please Log in or Create an account to join the conversation.
- Stigoe
- Offline
- Senior Member
-
Less
More
- Posts: 60
- Thank you received: 8
25 Apr 2018 19:00 #109607
by Stigoe
Replied by Stigoe on topic PathPilot 2.0.2 adding rtlib's
This may be one reason why it doesn't work. I didn't use the latest source, I used LCNC 2.7.8.2. Clone linuxcnc
$:cd repos/tormach_linuxcnc/ $:git clone git://github.com/linuxcnc/linuxcnc.git linuxcnc
Please Log in or Create an account to join the conversation.
- emptyhb
- Offline
- Junior Member
-
Less
More
- Posts: 25
- Thank you received: 2
25 Apr 2018 19:19 #109609
by emptyhb
Replied by emptyhb on topic PathPilot 2.0.2 adding rtlib's
I'm switch back to 2.7.12 version
Then repeat all steps again, but nothing different.
But, i found: if i comple .comp file with "halcompile --install" the file size of rtlib (compiled comp) it different with default linuxcnc build.
How do you use halcompile? or you are using default linuxcnc compiled files?
$ git fetch origin 2.7
$ git checkout 2.7But, i found: if i comple .comp file with "halcompile --install" the file size of rtlib (compiled comp) it different with default linuxcnc build.
How do you use halcompile? or you are using default linuxcnc compiled files?
Please Log in or Create an account to join the conversation.
- dinkata
- Offline
- Premium Member
-

Less
More
- Posts: 101
- Thank you received: 1
26 Apr 2018 04:25 #109628
by dinkata
Replied by dinkata on topic PathPilot 2.0.2 adding rtlib's
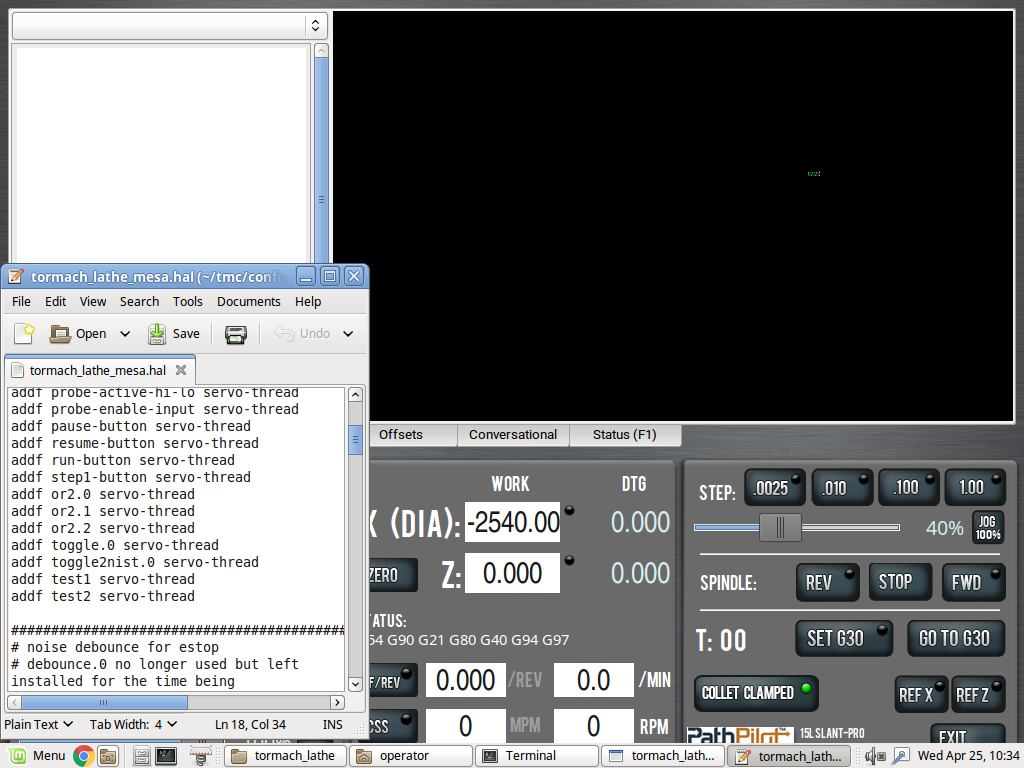
I addedand I think it works
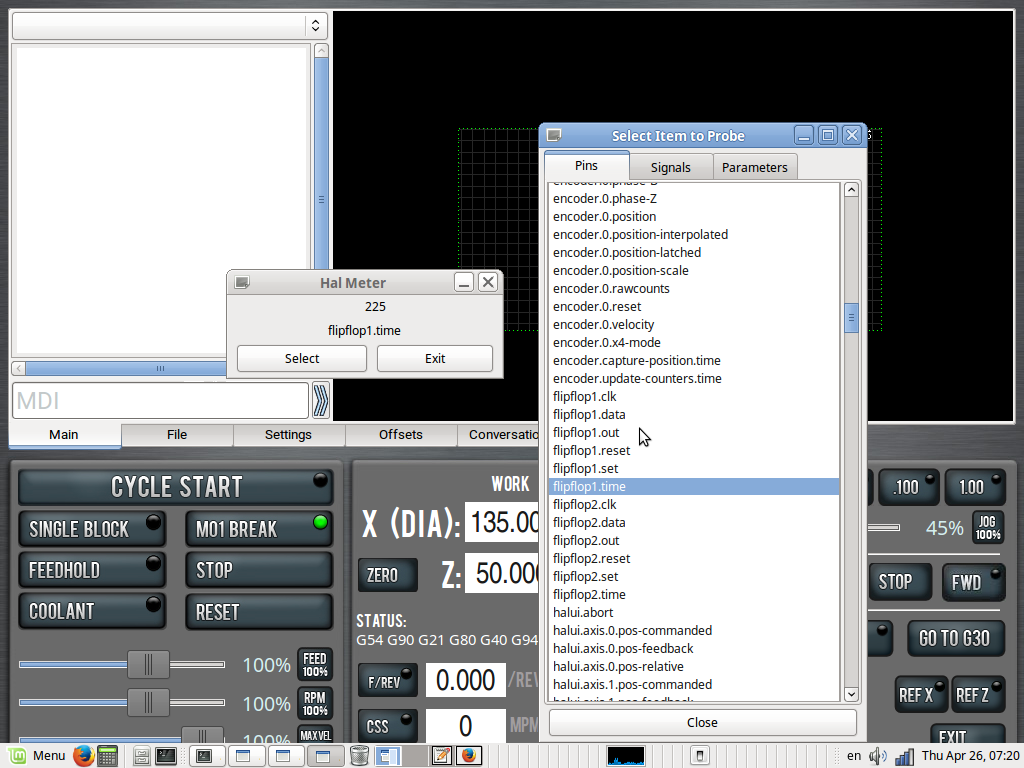
loadrt flipflop names=flipflop1,flipflop2
.....................................
addf flipflop1 servo-thread
addf flipflop2 servo-thread
The following user(s) said Thank You: emptyhb
Please Log in or Create an account to join the conversation.
- DaOne
-
 Topic Author
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 155
- Thank you received: 6
26 Apr 2018 04:59 #109629
by DaOne
Replied by DaOne on topic PathPilot 2.0.2 adding rtlib's
Any of you guys using a parallel port? Curious what you bypassed.
Please Log in or Create an account to join the conversation.
- dinkata
- Offline
- Premium Member
-
Less
More
- Posts: 101
- Thank you received: 1
26 Apr 2018 05:12 - 26 Apr 2018 05:16 #109630
by dinkata
That's how it works
@DaOne please share ini and hal only for XHC-HB04 !
Replied by dinkata on topic PathPilot 2.0.2 adding rtlib's
Any of you guys using a parallel port? Curious what you bypassed.
loadrt hal_parport cfg="0x378 out"
setp parport.0.reset-time 500
loadrt charge_pump
......................
addf parport.0.read base-thread
addf parport.0.write base-thread
addf parport.0.reset base-thread
addf charge-pump base-thread@DaOne please share ini and hal only for XHC-HB04 !
Last edit: 26 Apr 2018 05:16 by dinkata.
Please Log in or Create an account to join the conversation.
- DaOne
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 155
- Thank you received: 6
26 Apr 2018 05:27 #109632
by DaOne
No I understand the hal and ini files. Thats the easy part. When not in sim mode there is checks at startup (python code) that looks for the mesa card and then ethernet. It will error out and force close with a dialog box if they are not detected. its done in pathpilotmanager.py I am almost sure. I have not even touched the hal files or ini files in 2.0 yet. Gonna set through it before adding in all my mods to the python code. I just don't want to reinvent the wheel if someone else has done it already.
On the XHC-HB04 ini and hal files I would assume you do it just like you do in linuxcnc. I don't have one yet but might pick one up to play with for this lathe retrofit.
Replied by DaOne on topic PathPilot 2.0.2 adding rtlib's
Any of you guys using a parallel port? Curious what you bypassed.
That's how it worksloadrt hal_parport cfg="0x378 out" setp parport.0.reset-time 500 loadrt charge_pump ...................... addf parport.0.read base-thread addf parport.0.write base-thread addf parport.0.reset base-thread addf charge-pump base-thread
@DaOne please share ini and hal only for XHC-HB04 !
No I understand the hal and ini files. Thats the easy part. When not in sim mode there is checks at startup (python code) that looks for the mesa card and then ethernet. It will error out and force close with a dialog box if they are not detected. its done in pathpilotmanager.py I am almost sure. I have not even touched the hal files or ini files in 2.0 yet. Gonna set through it before adding in all my mods to the python code. I just don't want to reinvent the wheel if someone else has done it already.
On the XHC-HB04 ini and hal files I would assume you do it just like you do in linuxcnc. I don't have one yet but might pick one up to play with for this lathe retrofit.
Please Log in or Create an account to join the conversation.
Time to create page: 0.756 seconds