What are the chances of getting this setup working?
- my1987toyota
-

- Offline
- Platinum Member
-

Less
More
- Posts: 994
- Thank you received: 444
18 Aug 2023 22:45 #278424
by my1987toyota
Replied by my1987toyota on topic What are the chances of getting this setup working?
Blazini36- I had never tried the Openpnp to Linuxcnc thing my self and it is great you were able to make the headway you did.
I am more on the mechanical spectrum of things . Programing doesn't come easy to me so everything is usually a
fight to get anywhere and sometimes I succeed. That said I wish you the best of luck which ever route you go.
I am more on the mechanical spectrum of things . Programing doesn't come easy to me so everything is usually a
fight to get anywhere and sometimes I succeed. That said I wish you the best of luck which ever route you go.
Please Log in or Create an account to join the conversation.
- blazini36
- Offline
- Platinum Member
-
Less
More
- Posts: 972
- Thank you received: 167
19 Aug 2023 07:55 #278445
by blazini36
Replied by blazini36 on topic What are the chances of getting this setup working?
Well the OpenPnP to LinuxCNC thing wasn't really possible as it is. linuxcncrsh has always been there but it's like unexplored territory. iforce2d did alot more work than I would have thought necessary to customize a linuxcncrsh-like server to add stuff that is typically found in 3d printers since that's the way OpenPnP is setup.
I try to stay away from programming myself. Takes me a long time to get anywhere since I really don't know what I'm doing otherwise something like a unified start script would probably be simple.
I know you were doing something with a PnP, how's that going?
I try to stay away from programming myself. Takes me a long time to get anywhere since I really don't know what I'm doing otherwise something like a unified start script would probably be simple.
I know you were doing something with a PnP, how's that going?
The following user(s) said Thank You: my1987toyota
Please Log in or Create an account to join the conversation.
- my1987toyota
-
- Offline
- Platinum Member
-
Less
More
- Posts: 994
- Thank you received: 444
19 Aug 2023 20:22 #278493
by my1987toyota
Replied by my1987toyota on topic What are the chances of getting this setup working?
well unfortunately I haven't had the time to mess with it. The machine is operational but I have had to
divert all my time to other things at work . I will get back to it when work eases up.
divert all my time to other things at work . I will get back to it when work eases up.
Please Log in or Create an account to join the conversation.
- bkt
-

- Offline
- Platinum Member
-
Less
More
- Posts: 1111
- Thank you received: 114
24 Oct 2023 19:25 #283750
by bkt
Replied by bkt on topic What are the chances of getting this setup working?
see now these interesting session ... about streaming interrupt for sure have 2 different causes: 1- usb .... 2-camera buffer .... in my experience sometime needs to create a buffer of image to use when stream go down ..... but better was use qv4l2 aka videoforlinux, for discover driveable pin of camera .... on videoforlinux you can try play with various options for check best setup of your camera .... normally auto exposure, auto white balance and other "auto" parameter when present they have a big impact on the fluidity of acquisition.... after that you have a realtime system and you use a lot of resources to acquire data at high speed with a non-priority IRQ.... you are better off using a camera with low resolution... on openCV side, after discover the right parameter better is to fix it on code using properOut of curiosity I had a go at it and got it mostly working with 2.9 on a recent Bookworm installation.
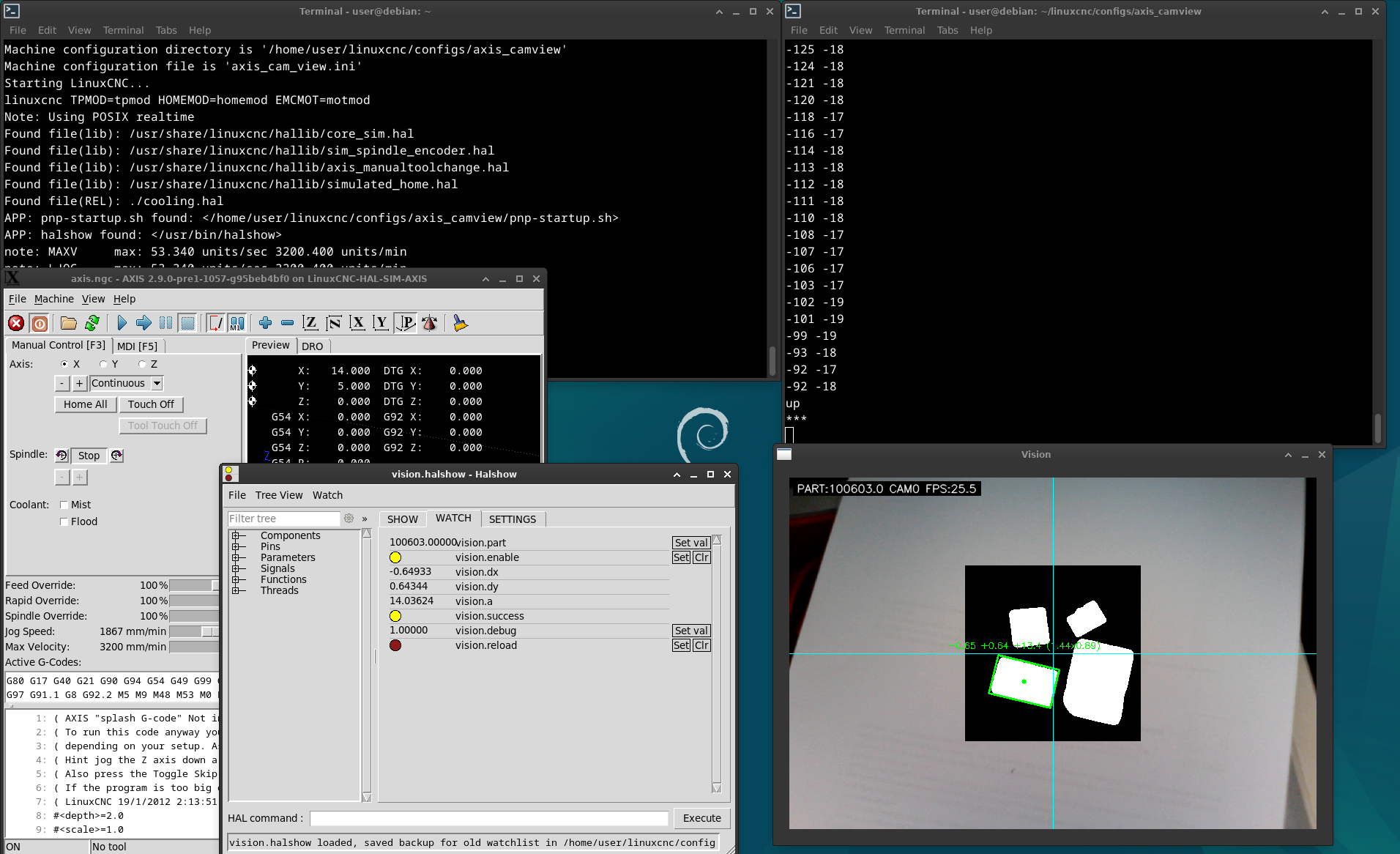
Here is a sim config:
I was struggling to get the usb camera stream working and ended up installing a bunch of stuff that turned out to be irrelevant but you will probably need this:
sudo apt install qv4l2
To try it out:
1. open a terminal and go to
/home/user/linuxcnc/configs/axis_camview/
2. run the vision app
$ python3 pnp.py
this should open a window and show a live stream of your usb cam.
If you don't then you may have to adjust the video device number in the brackets in line 271 in 'pnp.py'
self.cam = cv.VideoCapture(0)
once that works, open another terminal and run
$ linuxcnc
then choose the 'axis_camview' config.
Some notes:
I don't know much about opencv and even less about gtk so pnp.py will likely need some more work. Sometimes the stream breaks when loading pnp.py or when starting the linuxcnc config. Also exiting the vision app seems a bit iffy, I usually need to hit CTRL+c a few times and then ENTER a few times.
Setting 'vision'debug' to 0 in halshow will hide the edge finding debug window.
To test I used a SD-card and good lighting with a ring light. The vision app seems to be looking for a certain format of rectangle.
I use a usb web cam with 720x480 resolution. Depending on your camera you may need to adjust 'pnp.py' in the following lines:
300 self.cam.set(cv.CAP_PROP_FRAME_WIDTH, 720)
301 self.cam.set(cv.CAP_PROP_FRAME_HEIGHT, 480)
418 frame = cv.warpPerspective(frame, M, (720, 480))
pnp.py is made to handle two cameras (bottom, top). Since I only have the one camera I had to disable the second camera by commenting line 383 and adding line 384
383 #if p.cam == 0:
384 if True:
Good luck.
cap->set(CV_CAP_PROP_AUTO_EXPOSURE, xx); command .... (xx value is show on videoforlinux option, choose the right for you and insert in your py or .cc capturing file)
The following user(s) said Thank You: blazini36, my1987toyota
Please Log in or Create an account to join the conversation.
- blazini36
- Offline
- Platinum Member
-
Less
More
- Posts: 972
- Thank you received: 167
08 Apr 2025 14:02 #325928
by blazini36
Replied by blazini36 on topic What are the chances of getting this setup working?
I forgot to say thanks to bkt for testing that out, it's good to know that that stuff at least somewhat works.
I got busy with other things and set my DIY PnP machine off to the side for a while but I just recently resurrected it as a laser cutter that can be swapped back to a PnP once I make a universal head for it.
Not sure how long it will be until I get back to the PnP thing but I really wish there was more activity with the PnP stuff in LinuxCNC. Since I don't actually own a PnP I never actually used one so it'll be a bit daunting if I have to pick this up from scratch.
Kind of surprising there isn't more activity with PnPs in LinuxCNC, it can already do almost everything it would need to without all the weird pseudo Gcode nonsense that OpenPnP uses. With all the cheap PCB manufacturers these days, you'd think we'd all be building PnPs.
I got busy with other things and set my DIY PnP machine off to the side for a while but I just recently resurrected it as a laser cutter that can be swapped back to a PnP once I make a universal head for it.
Not sure how long it will be until I get back to the PnP thing but I really wish there was more activity with the PnP stuff in LinuxCNC. Since I don't actually own a PnP I never actually used one so it'll be a bit daunting if I have to pick this up from scratch.
Kind of surprising there isn't more activity with PnPs in LinuxCNC, it can already do almost everything it would need to without all the weird pseudo Gcode nonsense that OpenPnP uses. With all the cheap PCB manufacturers these days, you'd think we'd all be building PnPs.
The following user(s) said Thank You: my1987toyota
Please Log in or Create an account to join the conversation.
- my1987toyota
-
- Offline
- Platinum Member
-
Less
More
- Posts: 994
- Thank you received: 444
15 Apr 2025 18:26 - 15 Apr 2025 18:31 #326395
by my1987toyota
Replied by my1987toyota on topic What are the chances of getting this setup working?
Well with my project I got interested in other things and haven't spent much time on it in a while.
Partly the placer head desperately needs updating to modern day equipment. Cable and pulley
for the Z axis is in my opinion a terrible idea but the machine was designed in 1993. We have a few
other PnP machines where I work so this one was more or less an experiment. Plus work just
doesn't seem to ease up.
Partly the placer head desperately needs updating to modern day equipment. Cable and pulley
for the Z axis is in my opinion a terrible idea but the machine was designed in 1993. We have a few
other PnP machines where I work so this one was more or less an experiment. Plus work just
doesn't seem to ease up.
Last edit: 15 Apr 2025 18:31 by my1987toyota.
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21640
- Thank you received: 7394
15 Apr 2025 18:54 #326399
by tommylight
Replied by tommylight on topic What are the chances of getting this setup working?
@my1987toyota,
How is the recovery going?
How is the recovery going?
The following user(s) said Thank You: my1987toyota
Please Log in or Create an account to join the conversation.
- my1987toyota
-
- Offline
- Platinum Member
-
Less
More
- Posts: 994
- Thank you received: 444
16 Apr 2025 20:46 #326488
by my1987toyota
Replied by my1987toyota on topic What are the chances of getting this setup working?
if you're referring to my back it's as good as it is going to get. I have to be careful how much I lift
because If I do to much weight I could inadvertently start loosening the screws. For the most
part though I'm good.
because If I do to much weight I could inadvertently start loosening the screws. For the most
part though I'm good.
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- tommylight
-
- Away
- Moderator
-
Less
More
- Posts: 21640
- Thank you received: 7394
16 Apr 2025 22:02 #326490
by tommylight
Replied by tommylight on topic What are the chances of getting this setup working?
I am glad.
And i am fully aware of the pain and suffering those types of injuries incur, been over 30 years i messed my spine, still hurts more or less, over 20 years since i messed my knee still hurts daily, elbow, hand, left foot, etc etc.
I learned to live with the pain to the point of not noticing most of the time while working, but any strain reminds me. Luckily, it has not stopped me or even slowed down a bit...well maybe about 10% slow down in general.
And i am fully aware of the pain and suffering those types of injuries incur, been over 30 years i messed my spine, still hurts more or less, over 20 years since i messed my knee still hurts daily, elbow, hand, left foot, etc etc.
I learned to live with the pain to the point of not noticing most of the time while working, but any strain reminds me. Luckily, it has not stopped me or even slowed down a bit...well maybe about 10% slow down in general.
The following user(s) said Thank You: my1987toyota
Please Log in or Create an account to join the conversation.
- my1987toyota
-
- Offline
- Platinum Member
-
Less
More
- Posts: 994
- Thank you received: 444
17 Apr 2025 00:04 #326496
by my1987toyota
Replied by my1987toyota on topic What are the chances of getting this setup working?
I am sure you have also had to deal with the type of people that look at you and go " Oh you look fine,
say can you ( add requested favor here ) for me"? I have had to deal with that a lot. It don't matter how
tired you are, how much you just gut out life's aches and pains. they are utterly convinced you exist
to make other people's whims a reality.
Sorry went on a bit of a rant there. And no it's no one from the linuxcnc forum.
say can you ( add requested favor here ) for me"? I have had to deal with that a lot. It don't matter how
tired you are, how much you just gut out life's aches and pains. they are utterly convinced you exist
to make other people's whims a reality.
Sorry went on a bit of a rant there. And no it's no one from the linuxcnc forum.
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
Time to create page: 0.172 seconds