Following Error When Homing
- rmu
-

- Offline
- Elite Member
-

Less
More
- Posts: 279
- Thank you received: 101
21 Apr 2020 13:03 #164958
by rmu
Replied by rmu on topic Following Error When Homing
Hal file:
Encoder resolution on X and Y scales is a bit on the course side, 125 pulses per mm on X and 250 pulses per mm on Y. Z has 800 pulses per mm.
Encoder resolution on X and Y scales is a bit on the course side, 125 pulses per mm on X and 250 pulses per mm on Y. Z has 800 pulses per mm.
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-

Less
More
- Posts: 17997
- Thank you received: 5284
21 Apr 2020 13:36 #164962
by PCW
Replied by PCW on topic Following Error When Homing
That looks normal function order wise
could you try with
setp pid.x.error-previous-target false
(this will change the tuning)
Otherwise to chase this down will probably require halscope
and a wide following error setting so a following error is not tripped
Then trace the position, following error, PID out and index enable at
say 2 servo thread periods per division when homing (single trace triggered on
index enable falling edge)
could you try with
setp pid.x.error-previous-target false
(this will change the tuning)
Otherwise to chase this down will probably require halscope
and a wide following error setting so a following error is not tripped
Then trace the position, following error, PID out and index enable at
say 2 servo thread periods per division when homing (single trace triggered on
index enable falling edge)
Please Log in or Create an account to join the conversation.
- rmu
-
- Offline
- Elite Member
-
Less
More
- Posts: 279
- Thank you received: 101
22 Apr 2020 07:30 #165052
by rmu
Replied by rmu on topic Following Error When Homing
This is a Heisenbug. As soon as i attach the HalScope, those axis/joints I watch do work as supposed.
Please Log in or Create an account to join the conversation.
- rmu
-
- Offline
- Elite Member
-
Less
More
- Posts: 279
- Thank you received: 101
22 Apr 2020 07:56 - 22 Apr 2020 08:04 #165055
by rmu
Replied by rmu on topic Following Error When Homing
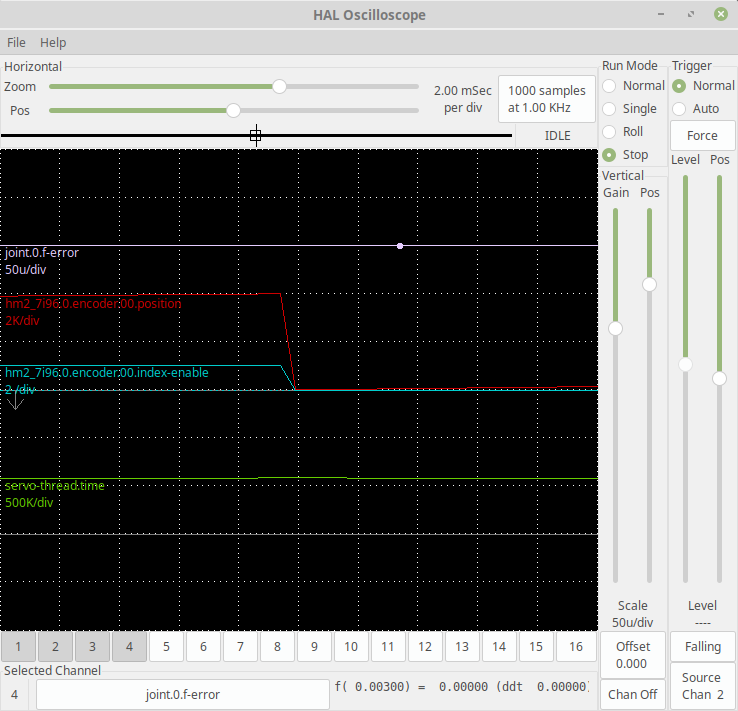
Got it. Don't know what to make of it. Following error explodes one servo period after index-enable is 0. Second screenshot is from second attempt, when it works. x-pos-cmd when zoomed in looks exactly like f-error.
Last edit: 22 Apr 2020 08:04 by rmu. Reason: Add second screenshot.
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-
Less
More
- Posts: 21767
- Thank you received: 7439
22 Apr 2020 12:03 #165082
by tommylight
Replied by tommylight on topic Following Error When Homing
Those screenshots point to axis not being tuned properly.
Please Log in or Create an account to join the conversation.
- rmu
-
- Offline
- Elite Member
-
Less
More
- Posts: 279
- Thank you received: 101
22 Apr 2020 12:28 - 22 Apr 2020 12:30 #165092
by rmu
I'm pretty sure the tuning can't be much improved at this (low) speed (without changing to a higher res encoder).
Replied by rmu on topic Following Error When Homing
You mean the following error increasing? It always stays below one encoder count. I think the stairsteps you see are an artifact of some kind of interpolation based on velocity and interval. One encoder count amounts to 8µm.Those screenshots point to axis not being tuned properly.
I'm pretty sure the tuning can't be much improved at this (low) speed (without changing to a higher res encoder).
Last edit: 22 Apr 2020 12:30 by rmu.
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17997
- Thank you received: 5284
22 Apr 2020 14:59 - 22 Apr 2020 15:00 #165113
by PCW
Replied by PCW on topic Following Error When Homing
Hmm something is different but I'm not sure of the cause.
In your plots, the encoder position reset happens one
sample later than the index-enable falling edge
In my simple test, the encoder position reset happens in the
same sample:
In your plots, the encoder position reset happens one
sample later than the index-enable falling edge
In my simple test, the encoder position reset happens in the
same sample:
Last edit: 22 Apr 2020 15:00 by PCW.
Please Log in or Create an account to join the conversation.
- rmu
-
- Offline
- Elite Member
-
Less
More
- Posts: 279
- Thank you received: 101
22 Apr 2020 15:16 #165118
by rmu
Replied by rmu on topic Following Error When Homing
Maybe that has to do with pid.x.error-previous-target true. I will try again setting this to false.
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17997
- Thank you received: 5284
22 Apr 2020 15:34 #165122
by PCW
Replied by PCW on topic Following Error When Homing
Well it _should_ not (index-enable should be an input only to the PID component)
Please Log in or Create an account to join the conversation.
- turbostew
- Offline
- Premium Member
-

Less
More
- Posts: 129
- Thank you received: 8
04 Nov 2022 15:11 #255919
by turbostew
Replied by turbostew on topic Following Error When Homing
Was a solution ever found to this problem?
Reviving on old thread here..... So I am having the same problem as rmu. I see a big glitch on the following error one period after index enable goes low. Mill is a servo system with encoder feedback and using encoder index for homing. I have a mux2 plus a timedelay to delay switching over to a small FERROR after homing which works but I would like to get to root cause (Yes, I am an enginerd).
Reviving on old thread here..... So I am having the same problem as rmu. I see a big glitch on the following error one period after index enable goes low. Mill is a servo system with encoder feedback and using encoder index for homing. I have a mux2 plus a timedelay to delay switching over to a small FERROR after homing which works but I would like to get to root cause (Yes, I am an enginerd).
Please Log in or Create an account to join the conversation.
Time to create page: 0.159 seconds