New Trajectory Planner - Testers/programs wanted
- skunkworks
- Online
- Moderator
-

Less
More
- Posts: 350
- Thank you received: 153
15 Dec 2016 18:35 #84211
by skunkworks
Replied by skunkworks on topic New Trajectory Planner - Testers/programs wanted
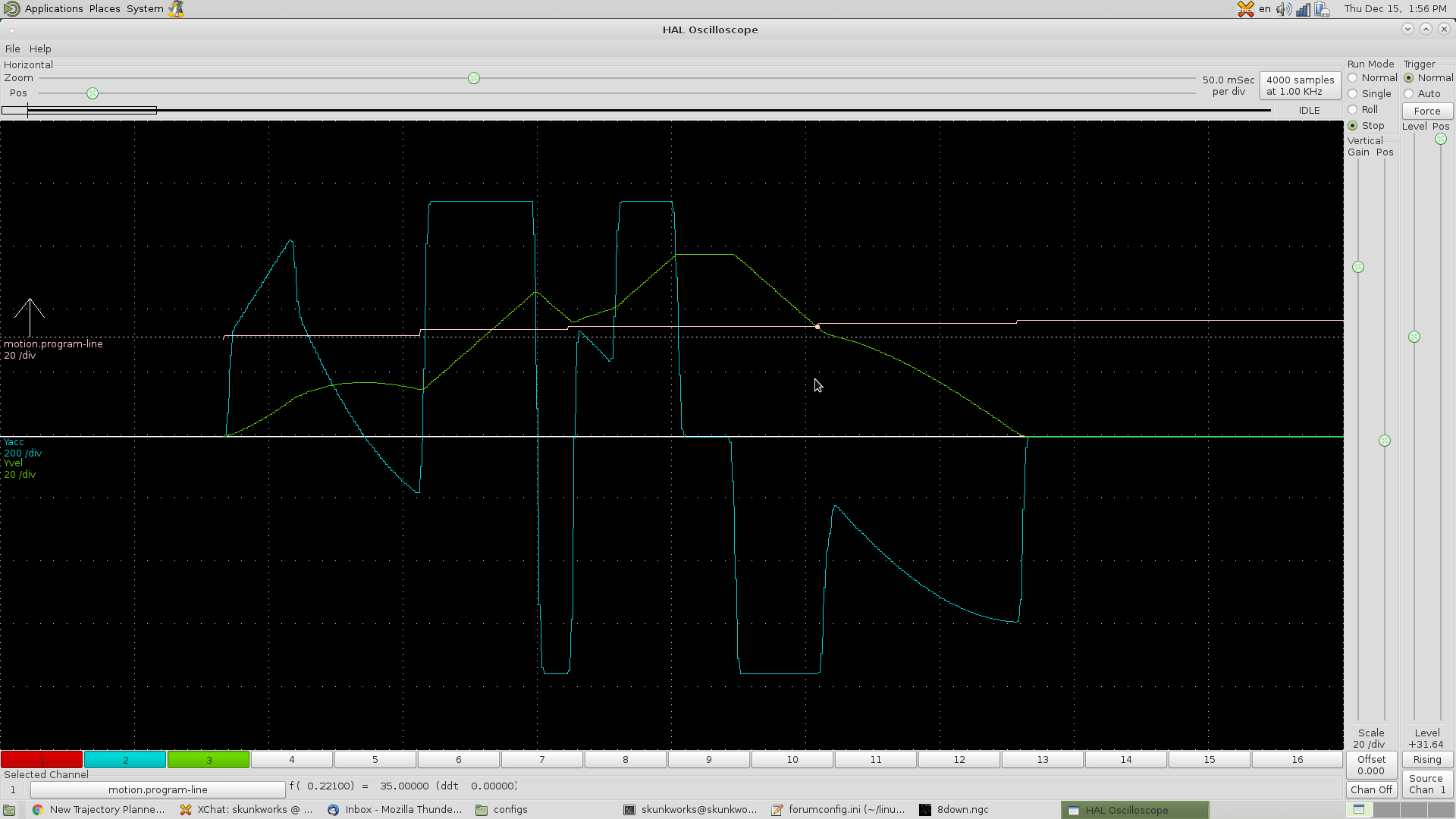
I used your ini and my sim hal files (that have acc/vel calculated) and am not seeing any violation.
Couple of things.
-have you done a mem check?
-are you getting any realtime delays?
-could you have sticktion or something going on at that point to cause a following error?
-How is your tuning?
I could see the following error happening first - then the axis costing down creating the line as if it wasn't following the circle.

Couple of things.
-have you done a mem check?
-are you getting any realtime delays?
-could you have sticktion or something going on at that point to cause a following error?
-How is your tuning?
I could see the following error happening first - then the axis costing down creating the line as if it wasn't following the circle.
Please Log in or Create an account to join the conversation.
- skunkworks
- Online
- Moderator
-
Less
More
- Posts: 350
- Thank you received: 153
15 Dec 2016 18:44 #84212
by skunkworks
Replied by skunkworks on topic New Trajectory Planner - Testers/programs wanted
A few more things? What version of linuxcnc did you come from? was it 2.6? This would somewhat make sense that putting the trajectory planner ARC_BLEND_ENABLE to false puts it back to 2.6 - 1 segment look ahead. The new TP uses all your acceleration available compared to the previous (2.6 and older) TP which would use only half the available acceleration. (for blended moves) This would then point even more towards a tuning issue.
Please Log in or Create an account to join the conversation.
- guymalpass
- Offline
- Senior Member
-

Less
More
- Posts: 48
- Thank you received: 1
15 Dec 2016 19:01 #84214
by guymalpass
Could you please elaborate on this
Does that mean you saw the same problem?
Cheers
Replied by guymalpass on topic New Trajectory Planner - Testers/programs wanted
- No I haven't done a memcheck
- No realtime delays
- I got the same problem with the motors mechanically disconnected
- I think my tuning is good, have been running this tune for a year and this machine sees a lot of work
- I came from JA9 which was based on 2.8, since my original post I reverted back but still get the same error. This leads me to believe linuxcnc just doesn't like that bit of gcode so I edited it and now seems ok.
Could you please elaborate on this
?I could see the following error happening first - then the axis costing down creating the line as if it wasn't following the circle
Does that mean you saw the same problem?
Cheers
Please Log in or Create an account to join the conversation.
- skunkworks
- Online
- Moderator
-
Less
More
- Posts: 350
- Thank you received: 153
15 Dec 2016 20:02 #84217
by skunkworks
Replied by skunkworks on topic New Trajectory Planner - Testers/programs wanted
which axis f-errrors? I assume it is Y? (joint 1 or 2?) it really hammers the acceleration around that point. (but doesn't violate it)
Please Log in or Create an account to join the conversation.
- guymalpass
- Offline
- Senior Member
-
Less
More
- Posts: 48
- Thank you received: 1
15 Dec 2016 20:08 #84218
by guymalpass
Replied by guymalpass on topic New Trajectory Planner - Testers/programs wanted
Yes it is the Y axis. The y axis is both joints 1 and 2, I'm pretty sure it was joint 1 that always triggered the ferror. Maybe my acceleration settings have been to aggressive but I've just been getting away with it this past year?
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-
Less
More
- Posts: 17985
- Thank you received: 5278
15 Dec 2016 20:37 - 15 Dec 2016 20:37 #84219
by PCW
Replied by PCW on topic New Trajectory Planner - Testers/programs wanted
Can you set Axis to plot the commanded instead of actual position and try your code that triggers the following error?
( This setting is towards the bottom of the Axis "View" menu )
This would help differentiate TP errors from tuning errors
( This setting is towards the bottom of the Axis "View" menu )
This would help differentiate TP errors from tuning errors
Last edit: 15 Dec 2016 20:37 by PCW.
Please Log in or Create an account to join the conversation.
- guymalpass
- Offline
- Senior Member
-
Less
More
- Posts: 48
- Thank you received: 1
15 Dec 2016 21:51 #84227
by guymalpass
Replied by guymalpass on topic New Trajectory Planner - Testers/programs wanted
I dropped my acceleration from 750 to 600 and it now follows the path without errors. I must admit I am quite surprised this was the solution considering how long it's been running like this. Thanks skunkworks for the testing you did and PCW for your input.
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Away
- Platinum Member
-

Less
More
- Posts: 4759
- Thank you received: 1461
16 Dec 2016 13:20 #84272
by Todd Zuercher
Replied by Todd Zuercher on topic New Trajectory Planner - Testers/programs wanted
I suspect that the answer might be simply the new traj. planner maintained higher speeds taxing your servos more pushing a marginal configuration over the edge. (but that is only a guess)
I think that it would still be a good idea to try further testing to nail down the real source of the cause. The above test that Peter mentioned may shine a light on whether the cause was an over taxed drive shutting down, or if it was the planner screwing up. Another idea, if your drives have tuning software that allow you to monitor the drive's output, and how close it is to a shutdown, while you are running the problem code.
I think that it would still be a good idea to try further testing to nail down the real source of the cause. The above test that Peter mentioned may shine a light on whether the cause was an over taxed drive shutting down, or if it was the planner screwing up. Another idea, if your drives have tuning software that allow you to monitor the drive's output, and how close it is to a shutdown, while you are running the problem code.
Please Log in or Create an account to join the conversation.
Time to create page: 0.169 seconds