Beginner kinemetrics setup for linear delta?
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19879
- Thank you received: 4643
12 Mar 2016 01:26 - 12 Mar 2016 01:27 #71464
by andypugh
Sorry, I am afraid we got a bit carried away in minutiae.
Lineardeltakins is already part of a special version of LinuxCNC called Joints_Axes12. It is an experimental development version that sorts out some very troublesome assumptions made early on in LinuxCNC development. There is an assumption in "normal" LinuxCNC that you have one motor/actuator for each valid axis word in the G-code. For any machine with non-cartesian kinematics that is a bad assumption.
I would very much advise that for your machine you should consider using that version.
Doing so is slightly harder than running the "normal" LinuxCNC. But I think it is worth it for your machine.
There are two ways to do it, either install git, download LinuxCNC and build from source (not _that_ hard, and we can help) which gives you a version of the source code so that you can make changes and improvements.
Or you can install a pre-compiled package. There are .deb files here:
buildbot.linuxcnc.org/dists/precise/scratch-rt/binary-i386/
You would want the latest joints_axes12......deb file, then install it on top of a working LinuxCNC installation with sudo dpkg -i deb-file-name.deb
Note that that link is forDebian Ubuntu Precise. If you navigate back up the tree you will find scratch directories containing JA debs for other Linux distributions.
(Warning, you have fallen in with bad company, bot Dewey and I are Joint_Axes evangelists and want to see the improvements in the normal installation)
If you install that version then you will find a complete working demonstration linear delta configuration that you can customise to suit your machine. And the machine will work rather better in a JA version.
Replied by andypugh on topic Beginner kinemetrics setup for linear delta?
But I have found some files in the past and was unable to determine what to do with the files, some help with this would be greatly appreciated.
Sorry, I am afraid we got a bit carried away in minutiae.
Lineardeltakins is already part of a special version of LinuxCNC called Joints_Axes12. It is an experimental development version that sorts out some very troublesome assumptions made early on in LinuxCNC development. There is an assumption in "normal" LinuxCNC that you have one motor/actuator for each valid axis word in the G-code. For any machine with non-cartesian kinematics that is a bad assumption.
I would very much advise that for your machine you should consider using that version.
Doing so is slightly harder than running the "normal" LinuxCNC. But I think it is worth it for your machine.
There are two ways to do it, either install git, download LinuxCNC and build from source (not _that_ hard, and we can help) which gives you a version of the source code so that you can make changes and improvements.
Or you can install a pre-compiled package. There are .deb files here:
buildbot.linuxcnc.org/dists/precise/scratch-rt/binary-i386/
You would want the latest joints_axes12......deb file, then install it on top of a working LinuxCNC installation with sudo dpkg -i deb-file-name.deb
Note that that link is for
(Warning, you have fallen in with bad company, bot Dewey and I are Joint_Axes evangelists and want to see the improvements in the normal installation)
If you install that version then you will find a complete working demonstration linear delta configuration that you can customise to suit your machine. And the machine will work rather better in a JA version.
Last edit: 12 Mar 2016 01:27 by andypugh. Reason: Got my Linux distributions confused
Please Log in or Create an account to join the conversation.
- andyhol
- Offline
- New Member
-

Less
More
- Posts: 19
- Thank you received: 0
12 Mar 2016 02:05 #71472
by andyhol
Replied by andyhol on topic Beginner kinemetrics setup for linear delta?
Which way would you recommend? I am willing to take more effort if it results better.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19879
- Thank you received: 4643
12 Mar 2016 10:10 - 12 Mar 2016 10:11 #71492
by andypugh
Replied by andypugh on topic Beginner kinemetrics setup for linear delta?
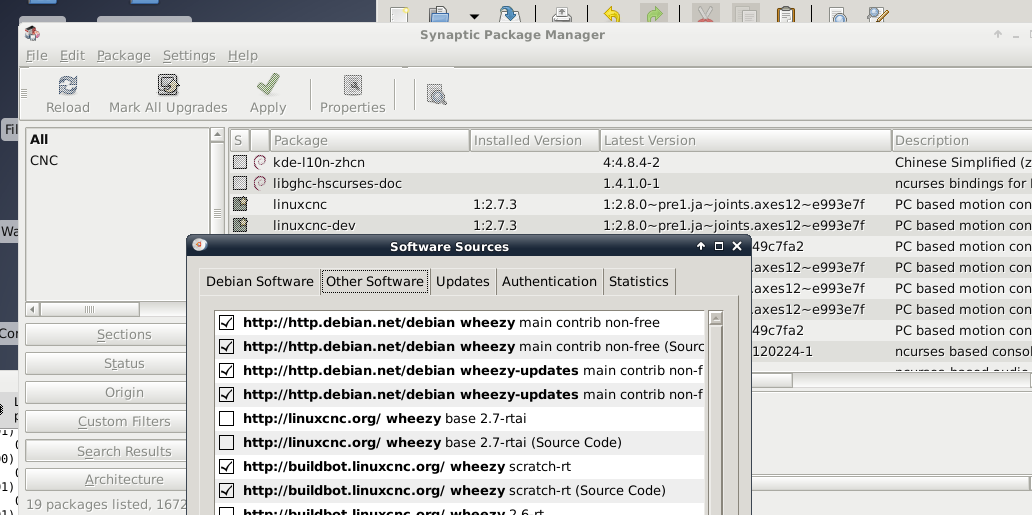
Having just experimented, the easiest way to get Joints-Axes is to edit the repository name in a standard installation.
I just tried it, and it appears to work:
I changed to scratch-rt as described here: buildbot.linuxcnc.org
But rather than edit the sources file, I did it in the GUI.
I just tried it, and it appears to work:
I changed to scratch-rt as described here: buildbot.linuxcnc.org
But rather than edit the sources file, I did it in the GUI.
Last edit: 12 Mar 2016 10:11 by andypugh.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19879
- Thank you received: 4643
12 Mar 2016 10:32 - 12 Mar 2016 10:33 #71493
by andypugh
Replied by andypugh on topic Beginner kinemetrics setup for linear delta?
And after a few minutes, a demo linear delta machine config, with a Vismach simulation:
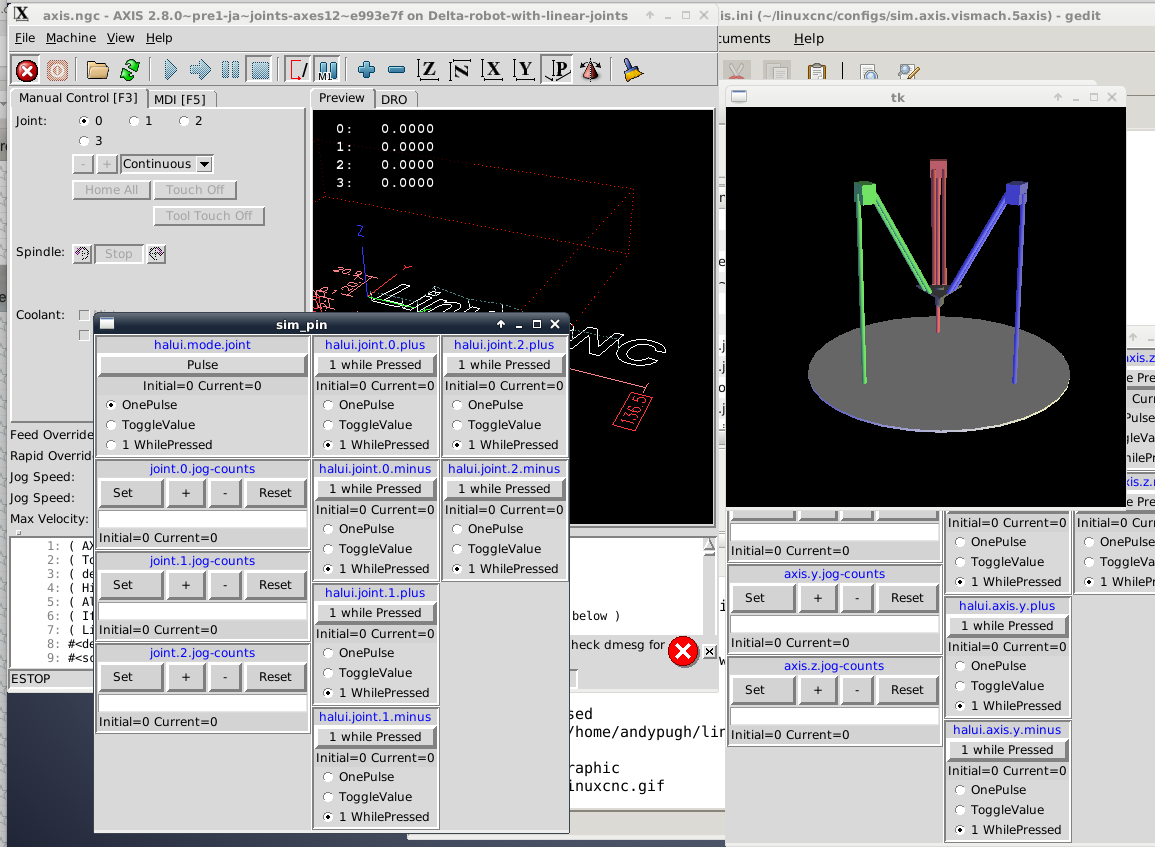
This is the "ldelta_demo" where the various HAL pins are connected to on-screen GUI elements.
There is another config where the connections are left for connecting to actual hardware instead.
This is the "ldelta_demo" where the various HAL pins are connected to on-screen GUI elements.
There is another config where the connections are left for connecting to actual hardware instead.
Last edit: 12 Mar 2016 10:33 by andypugh.
Please Log in or Create an account to join the conversation.
- andyhol
- Offline
- New Member
-
Less
More
- Posts: 19
- Thank you received: 0
12 Mar 2016 21:41 #71507
by andyhol
Replied by andyhol on topic Beginner kinemetrics setup for linear delta?
okay, let me see what I can do, it has been a while with Linux. I will keep you up to date and probably ask more questions
Thanks
Thanks
Please Log in or Create an account to join the conversation.
- andyhol
- Offline
- New Member
-
Less
More
- Posts: 19
- Thank you received: 0
12 Mar 2016 22:57 #71523
by andyhol
Replied by andyhol on topic Beginner kinemetrics setup for linear delta?
It looks like I am loaded with lucid, do I need to upgrade or just load the lucid scratch-rt files
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19879
- Thank you received: 4643
12 Mar 2016 23:37 #71530
by andypugh
To keep things simple, use the lucid scratch-rt version. One thing at a time is probably wise , rather than new OS and new LinuxCNC version at the same time.
Replied by andypugh on topic Beginner kinemetrics setup for linear delta?
It looks like I am loaded with lucid, do I need to upgrade or just load the lucid scratch-rt files
To keep things simple, use the lucid scratch-rt version. One thing at a time is probably wise , rather than new OS and new LinuxCNC version at the same time.
Please Log in or Create an account to join the conversation.
- andyhol
- Offline
- New Member
-
Less
More
- Posts: 19
- Thank you received: 0
12 Mar 2016 23:58 #71531
by andyhol
Replied by andyhol on topic Beginner kinemetrics setup for linear delta?
where will these new configs be located?
Please Log in or Create an account to join the conversation.
- dgarrett
- Offline
- Platinum Member
-

Less
More
- Posts: 492
- Thank you received: 297
13 Mar 2016 00:21 #71532
by dgarrett
Support has been dropped for Ubuntu 10.04 (Lucid) on the LinuxCNC master branch and all of its derivative branches. The Joints_axes12 branch is based on the master development branch so debs are not available. Ref:
article.gmane.org/gmane.linux.distributions.emc.devel/15246
When you do achieve a working system with a joints_axes branch, the easies way to find the configs is with the configuration selector gui -- walk the tree to:
Replied by dgarrett on topic Beginner kinemetrics setup for linear delta?
It looks like I am loaded with lucid
Support has been dropped for Ubuntu 10.04 (Lucid) on the LinuxCNC master branch and all of its derivative branches. The Joints_axes12 branch is based on the master development branch so debs are not available. Ref:
article.gmane.org/gmane.linux.distributions.emc.devel/15246
When you do achieve a working system with a joints_axes branch, the easies way to find the configs is with the configuration selector gui -- walk the tree to:
Sample Configurations/sim/axis/ldelta_demo
or
Sample Configurations/sim/axis/ldeltaPlease Log in or Create an account to join the conversation.
- andyhol
- Offline
- New Member
-
Less
More
- Posts: 19
- Thank you received: 0
13 Mar 2016 00:37 #71533
by andyhol
Replied by andyhol on topic Beginner kinemetrics setup for linear delta?
Then I guess I will download the wheezy iso and load it in, be back when that gets done.
Please Log in or Create an account to join the conversation.
Time to create page: 0.180 seconds