Kinematics for XYZAB mill
- rodw
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 11994
- Thank you received: 4084
28 Nov 2022 03:29 #257816
by rodw
I suspect there is a fair bit of turning done on the machine with the spindle treated as a live tool which would explain their choice of kinematics.
Can anyone help me bring them on board with Linuxcnc?
PS @Tommy, thats what I saw first too.
Replied by rodw on topic Kinematics for XYZAB mill
Of course that would be nice but when the machine manufacturer in question has been around 20 years and already has their own cad/cam software, it really needs to respect XYZAB kinematics to transition to Linuxcnc.@rodw:
This may be a crazy idea but if you modify the machine in such a way that the arm connected to the A axis rotate from 3 to 9 o'clock you will then have a XYZAC machine since the B axis will then act as a C axis (visualize with the arm at 6 o'clock). (There's also a bracket on the right of the legend that is interfering with such a motion)
I suspect there is a fair bit of turning done on the machine with the spindle treated as a live tool which would explain their choice of kinematics.
Can anyone help me bring them on board with Linuxcnc?
PS @Tommy, thats what I saw first too.
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4742
- Thank you received: 2125
28 Nov 2022 07:53 #257824
by Aciera
Replied by Aciera on topic Kinematics for XYZAB mill
Shouldn't be more complicated than the kinematics for the existing XYZBC- or XYZAC-trt kinematics. Maybe this helps:
forum.linuxcnc.org/media/kunena/attachme...5-axis-machines2.pdf
Don't let the matrix syntax scare you off, behind the scenes it's just a lot of trigonometry (sine/cosine). It's not as bad as it looks but it's tedious work to do by hand.
This is all very much on the outskirts of what LinuxCNC can do. Given that feedback from users running full 5 axis setups with LinuxCNC is very rarely seen here you might be in for a very lonely ride. My approach would be to create a simple vismac model of the machine and try to create a kinematic for XYZAB-trt and test it on a simulation config.
forum.linuxcnc.org/media/kunena/attachme...5-axis-machines2.pdf
Don't let the matrix syntax scare you off, behind the scenes it's just a lot of trigonometry (sine/cosine). It's not as bad as it looks but it's tedious work to do by hand.
This is all very much on the outskirts of what LinuxCNC can do. Given that feedback from users running full 5 axis setups with LinuxCNC is very rarely seen here you might be in for a very lonely ride. My approach would be to create a simple vismac model of the machine and try to create a kinematic for XYZAB-trt and test it on a simulation config.
Please Log in or Create an account to join the conversation.
- rodw
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 11994
- Thank you received: 4084
28 Nov 2022 08:14 #257827
by rodw
Replied by rodw on topic Kinematics for XYZAB mill
Thanks, I've not waded in yet but I will read this thread
forum.linuxcnc.org/10-advanced-configura...s-kinematics?start=0
Yeh, way out of my comfort zone for a guy that really only knows 2 axis plasma cutting!
The vismach model is on the agenda for sure.
forum.linuxcnc.org/10-advanced-configura...s-kinematics?start=0
Yeh, way out of my comfort zone for a guy that really only knows 2 axis plasma cutting!
The vismach model is on the agenda for sure.
Please Log in or Create an account to join the conversation.
- rodw
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 11994
- Thank you received: 4084
29 Nov 2022 06:15 #257944
by rodw
Replied by rodw on topic Kinematics for XYZAB mill
Ahh here is a diagram of this style of machine. Just the Z axis is lying down.
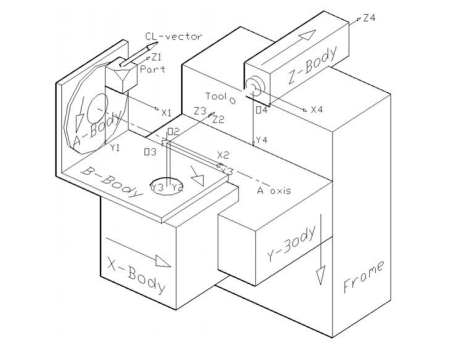
Not that I am any much the wiser!
Not that I am any much the wiser!
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4742
- Thank you received: 2125
29 Nov 2022 08:16 - 29 Nov 2022 08:28 #257949
by Aciera
Replied by Aciera on topic Kinematics for XYZAB mill
Do you need help creating the vismach model or the kinematics?
It would help to get a bit more information on the actual machine eg. the sense of positive direction of the A and B axis. It's just nice to get the model right the first time.
[edit]
Note that it is not just the Z axis that differs between the diagram and your image in the first post. In the image the B axis rotates with the A axis while in the diagram its the other way around. That kind of detail is important since the kinematic model will not be the same for both of those setups. So identifying the correct arrangement of the actual machine in question is the first step or you will be redoing the same work all over again.
It would help to get a bit more information on the actual machine eg. the sense of positive direction of the A and B axis. It's just nice to get the model right the first time.
[edit]
Note that it is not just the Z axis that differs between the diagram and your image in the first post. In the image the B axis rotates with the A axis while in the diagram its the other way around. That kind of detail is important since the kinematic model will not be the same for both of those setups. So identifying the correct arrangement of the actual machine in question is the first step or you will be redoing the same work all over again.
Last edit: 29 Nov 2022 08:28 by Aciera.
Please Log in or Create an account to join the conversation.
- rodw
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 11994
- Thank you received: 4084
29 Nov 2022 11:13 #257961
by rodw
Replied by rodw on topic Kinematics for XYZAB mill
You are right. I had not noticed the different orientation.
The machine is mostly used for jewelery molds cut from wax. It uses a 50000 rpm spindle with 4mm dia tooling. Because there are no cutting forces it just uses open loop NEMA 24 steppers and they reckon a tool could last 12 months!
I'll find out a bit more in terms of the dimensions. I think the A & B would be positive in the direction of the arrows.
They are not happy with their current Windows solutions as they can't get all axes moving smoothly at the one time. They'd like to migrate to Linuxcnc with a Mesa card and have asked for help. Initially I made the same mistake as Tommy, then I realised we don't yet have a Linuxcnc kinematics for XYZAB.
On the other 5 axis thread I linked to, Dewey Garrett said he'd be happy to merge other kinematics models into the core code so it would be good if we could use this opportunity to build an XYZAB-trt module.
But I have no clue about matrix algebra. I figure once the formulas were resolved I could code it in C.
I have not looked at Vismach yet but there is a a good start in the bridgemill sim and I thought I could manage that side of it for a proof of concept.. Long term, I wanted to build a model using STL's of the actual machine.
So in answer to your question, I need help with the maths to start with.
The machine is mostly used for jewelery molds cut from wax. It uses a 50000 rpm spindle with 4mm dia tooling. Because there are no cutting forces it just uses open loop NEMA 24 steppers and they reckon a tool could last 12 months!
I'll find out a bit more in terms of the dimensions. I think the A & B would be positive in the direction of the arrows.
They are not happy with their current Windows solutions as they can't get all axes moving smoothly at the one time. They'd like to migrate to Linuxcnc with a Mesa card and have asked for help. Initially I made the same mistake as Tommy, then I realised we don't yet have a Linuxcnc kinematics for XYZAB.
On the other 5 axis thread I linked to, Dewey Garrett said he'd be happy to merge other kinematics models into the core code so it would be good if we could use this opportunity to build an XYZAB-trt module.
But I have no clue about matrix algebra. I figure once the formulas were resolved I could code it in C.
I have not looked at Vismach yet but there is a a good start in the bridgemill sim and I thought I could manage that side of it for a proof of concept.. Long term, I wanted to build a model using STL's of the actual machine.
So in answer to your question, I need help with the maths to start with.
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- Grotius
-

- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
29 Nov 2022 12:55 #257967
by Grotius
Replied by Grotius on topic Kinematics for XYZAB mill
Hi Rod,
For me it's not really hard to do. But the time..
This is a part of a rt kinematics component in c. This rt component is linked to a c++ kinematic library.
github.com/grotius-cnc/hal-core/blob/mai...atic/hal/halmodule.c
So you don't need to know the exact math by default. You just setup the contraint's for the kinematic model, and
run it.
This is the c++ library code involved :
At line 287 you see how data is transferred from c to c++ and visa versa. It just transfers the data struct visa versa.
github.com/grotius-cnc/hal-core/blob/mai...p_interface/next.cpp
But...
You helped me a lot in the past. Just give me the machine spec's and i will create the component for you.

For me it's not really hard to do. But the time..
This is a part of a rt kinematics component in c. This rt component is linked to a c++ kinematic library.
github.com/grotius-cnc/hal-core/blob/mai...atic/hal/halmodule.c
So you don't need to know the exact math by default. You just setup the contraint's for the kinematic model, and
run it.
This is the c++ library code involved :
At line 287 you see how data is transferred from c to c++ and visa versa. It just transfers the data struct visa versa.
github.com/grotius-cnc/hal-core/blob/mai...p_interface/next.cpp
But...
You helped me a lot in the past. Just give me the machine spec's and i will create the component for you.
The following user(s) said Thank You: tommylight, rodw
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4742
- Thank you received: 2125
29 Nov 2022 13:35 - 29 Nov 2022 14:05 #257972
by Aciera
Replied by Aciera on topic Kinematics for XYZAB mill
So there you go just provide the specifics and soon you will be swamped by solutions ")
Maybe the most important question is whether the kinematics actually needs to be done in the controller (is that what the current controller does?) or if it's all done in the CAM they are using.
[edit]
Anyway I'm happy to try and help with the vismach model (I managed to create a model of my Mitsubishi Robot using STLs) and the math if that is the route you choose to go.
Maybe the most important question is whether the kinematics actually needs to be done in the controller (is that what the current controller does?) or if it's all done in the CAM they are using.
[edit]
Anyway I'm happy to try and help with the vismach model (I managed to create a model of my Mitsubishi Robot using STLs) and the math if that is the route you choose to go.
Last edit: 29 Nov 2022 14:05 by Aciera.
The following user(s) said Thank You: rodw
Please Log in or Create an account to join the conversation.
- JPL
- Offline
- Platinum Member
-
Less
More
- Posts: 337
- Thank you received: 118
29 Nov 2022 18:40 #258008
by JPL
You then have to swap both X-Y and A-B on the diagram to have the correct representation of the machine.
Replied by JPL on topic Kinematics for XYZAB mill
@rodw: Also note that the machine X and Y and inverted on the diagram. The picture on the machine show that the X axis is front-back, not the usual left-right depicted on the diagram. The whole (half) trunnion then rotate around the A axis, while the rotary table (B axis) rotate around the Y axis.... Note that it is not just the Z axis that differs between the diagram and your image in the first post. In the image the B axis rotates with the A axis while in the diagram its the other way around...
You then have to swap both X-Y and A-B on the diagram to have the correct representation of the machine.
The following user(s) said Thank You: rodw
Please Log in or Create an account to join the conversation.
- rodw
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 11994
- Thank you received: 4084
30 Nov 2022 05:35 #258093
by rodw
Replied by rodw on topic Kinematics for XYZAB mill
Jeez guys, thanks for all your support.
I've asked for a heap of data so will await a reply.
I've spent all my time today looking at the kinematics paper Aciera shared. I still don't understand how they derived formulas 6 & 7 from formulas 2 & 3 and figure 2. I'd like to be able to understand that so at least I can follow along.
I've asked for a heap of data so will await a reply.
I've spent all my time today looking at the kinematics paper Aciera shared. I still don't understand how they derived formulas 6 & 7 from formulas 2 & 3 and figure 2. I'd like to be able to understand that so at least I can follow along.
Please Log in or Create an account to join the conversation.
Time to create page: 0.169 seconds