Raspberry Pi 4
- wicki
-

- Offline
- Elite Member
-

Less
More
- Posts: 183
- Thank you received: 21
05 Aug 2019 07:23 - 05 Aug 2019 07:23 #141405
by wicki
Replied by wicki on topic Raspberry Pi 4
> If you haven't done so already, bring down the wlan0 interface. It might help.
A good hint!
I have done it and now I can do go down to a period of 140.000 in linCNC with
display via vnc.
Inside a "hal-only"-environment, it's possible to drive a stepper with 10kHz
with a step/dir-signal. But I think the timing quallity of the signal will be poor.
lets see")
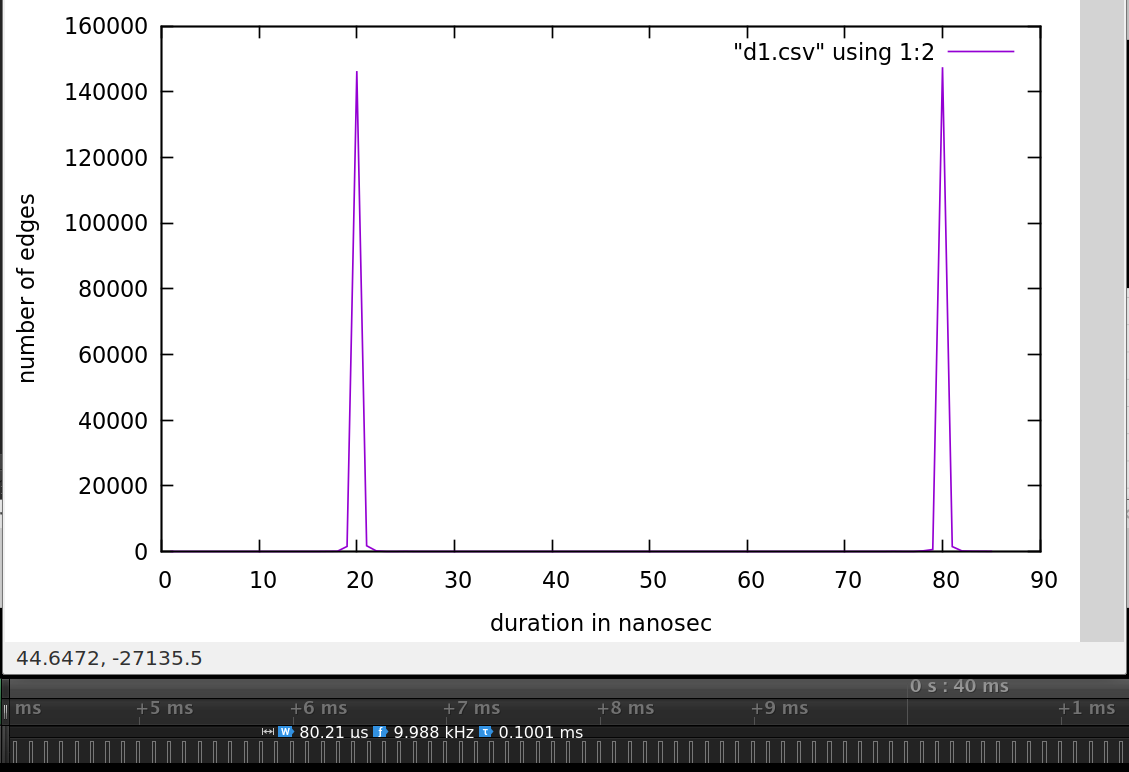
10kHz stepper signal - not as bad as expected. But some deviations in timing....
The above spikes are the durations of the "low" and "high" parts oth the squarewave.
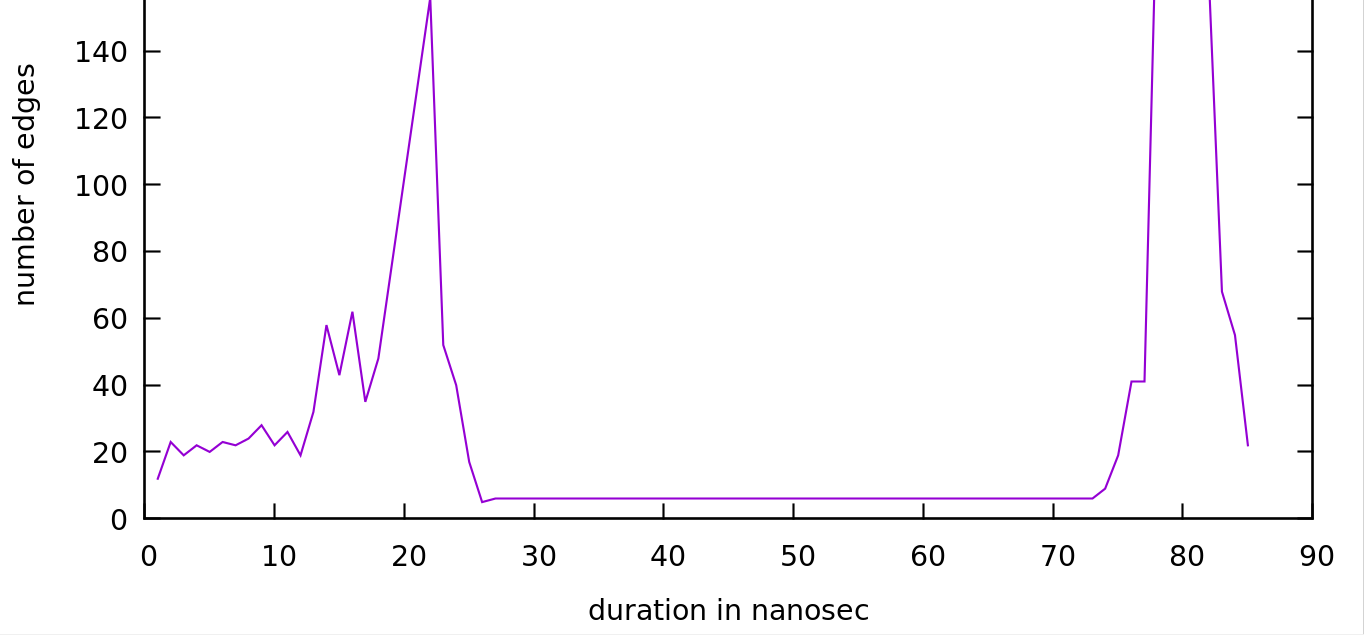
not even so bad.... but if I zoom it:
erste.de/timing-tests.PI4.html
A good hint!
I have done it and now I can do go down to a period of 140.000 in linCNC with
display via vnc.
Inside a "hal-only"-environment, it's possible to drive a stepper with 10kHz
with a step/dir-signal. But I think the timing quallity of the signal will be poor.
lets see
10kHz stepper signal - not as bad as expected. But some deviations in timing....
The above spikes are the durations of the "low" and "high" parts oth the squarewave.
not even so bad.... but if I zoom it:
erste.de/timing-tests.PI4.html
Last edit: 05 Aug 2019 07:23 by wicki.
The following user(s) said Thank You: joekline9
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19861
- Thank you received: 4636
05 Aug 2019 09:54 #141409
by andypugh
Replied by andypugh on topic Raspberry Pi 4
I have been experimenting at the LinuxCNC meetup in Stuttgart with the Pi4.
We converted a C1 lathe to CNC and I have been using the Pi4 Buster / preempt image here:
www.linuxcnc.org/dists/buster/2.8-uspace/
Using a Mesa 7i96 ethernet-connected breakout
I works well, but has some stability issues. This might be due to thermal issues with the Pi, we have no heat-sink or fan.

We converted a C1 lathe to CNC and I have been using the Pi4 Buster / preempt image here:
www.linuxcnc.org/dists/buster/2.8-uspace/
Using a Mesa 7i96 ethernet-connected breakout
I works well, but has some stability issues. This might be due to thermal issues with the Pi, we have no heat-sink or fan.
Attachments:
The following user(s) said Thank You: joekline9
Please Log in or Create an account to join the conversation.
- spma
-

- Offline
- Junior Member
-

Less
More
- Posts: 23
- Thank you received: 4
05 Aug 2019 10:37 #141411
by spma
and a fan to keep the cpu temperature as low as possible to avoid the automatic throttle down.
The throttle down mechanism makes the cpu run slower and (perhaps?) suspend execution for short amounts of time
in order to keep the temperature under control.
Also I advise using cpufreq to set the power governor to performance and use maximum clock speed, but this will only give you
any advantage if you're using a heat-sink and a fan to "externally" control the temperature.
Replied by spma on topic Raspberry Pi 4
andypugh that would be correct, from my experience using a Pi3 with Mesa cards you definitely need an heat-sinkI works well, but has some stability issues. This might be due to thermal issues with the Pi, we have no heat-sink or fan.
and a fan to keep the cpu temperature as low as possible to avoid the automatic throttle down.
The throttle down mechanism makes the cpu run slower and (perhaps?) suspend execution for short amounts of time
in order to keep the temperature under control.
Also I advise using cpufreq to set the power governor to performance and use maximum clock speed, but this will only give you
any advantage if you're using a heat-sink and a fan to "externally" control the temperature.
sudo apt-get install cpufrequtils
sudo cpufreq-set -g performance -d 1500000 -u 1500000 -c 0
The following user(s) said Thank You: joekline9
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-

Less
More
- Posts: 1317
- Thank you received: 453
05 Aug 2019 11:06 - 05 Aug 2019 11:22 #141412
by Hakan
Replied by Hakan on topic Raspberry Pi 4
I didn't see any stability issues in my testing. No fan or anything, it was just laying on the shelf.
It did use a 5A power supply, although I measured the current to be below 1A, typically 0.85A.
The system will sleep/hibernate/suspend/shut down after "a while" if left idle with no user input, this cured itNow the screen stays on the whole night. And the wired network interface stays up.
It did use a 5A power supply, although I measured the current to be below 1A, typically 0.85A.
The system will sleep/hibernate/suspend/shut down after "a while" if left idle with no user input, this cured it
sudo systemctl mask sleep.target suspend.target hibernate.target hybrid-sleep.target
Last edit: 05 Aug 2019 11:22 by Hakan.
The following user(s) said Thank You: spma
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-
Less
More
- Posts: 1317
- Thank you received: 453
05 Aug 2019 14:48 #141424
by Hakan
Replied by Hakan on topic Raspberry Pi 4
wicki does isolcpus=1,2,3 in /boot/config.txt help also for the base tread? It helped a lot for the servo thread.
The following user(s) said Thank You: joekline9, spma
Please Log in or Create an account to join the conversation.
- Bari
-

- Offline
- Platinum Member
-
Less
More
- Posts: 639
- Thank you received: 234
05 Aug 2019 14:57 #141425
by Bari
Replied by Bari on topic Raspberry Pi 4
Power management, speed stepping, virtualization etc will have similar effects on latency as on x86. It's just that ARM will have all those settings in completely different places than x86 where it's set in BIOS.
The following user(s) said Thank You: joekline9, spma
Please Log in or Create an account to join the conversation.
- wicki
-
- Offline
- Elite Member
-
Less
More
- Posts: 183
- Thank you received: 21
05 Aug 2019 17:04 - 05 Aug 2019 17:07 #141433
by wicki
Replied by wicki on topic Raspberry Pi 4
> does isolcpus=1,2,3 in /boot/config.txt help also for the base tread?
also a nice idea!
now a period of 80.000 ist possible.
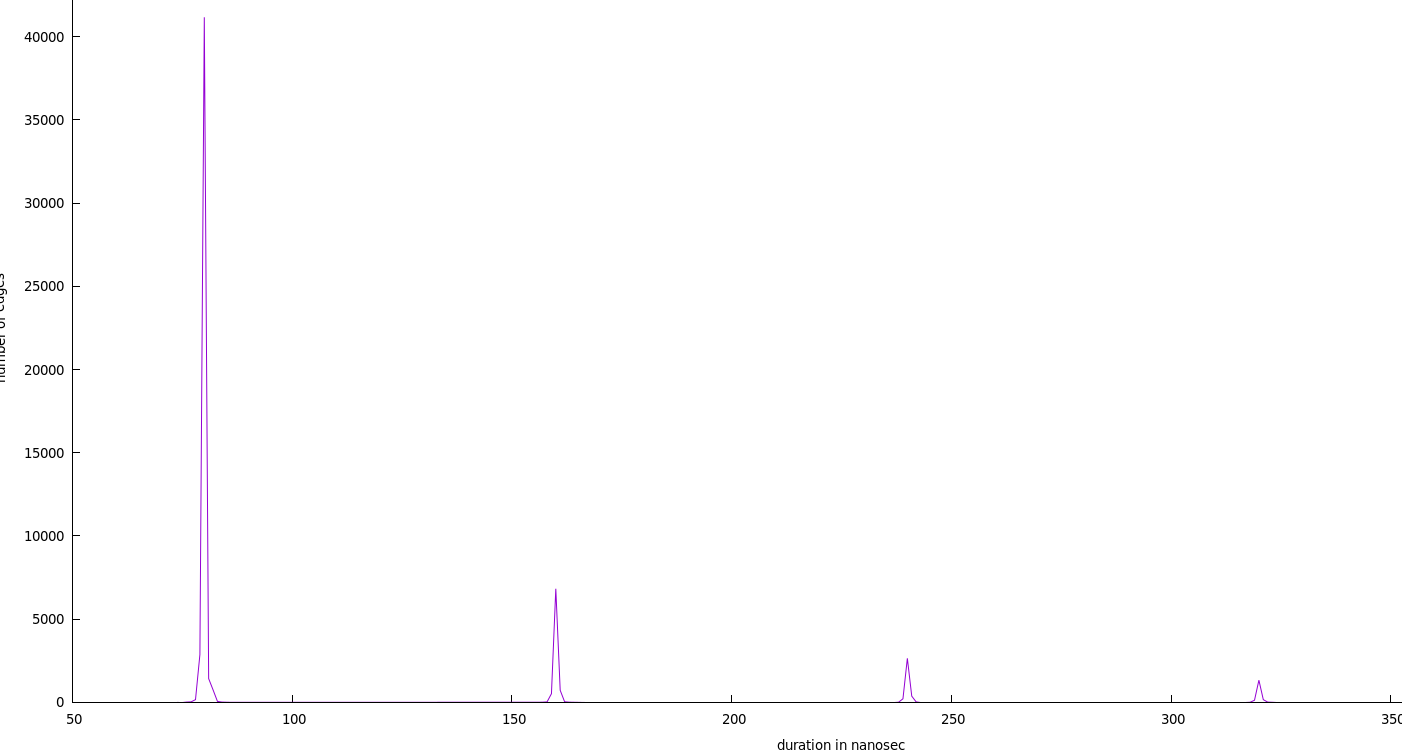
analyzing the squarewave is a little bit confusing me:
__--___--____--___
the high-level-timespan is always 80usec (between 78.5 and 81)
thas OK.
but the low-level-timespan differs much more. (beween 160usec an 320usec)
the time-period... thats not nice....
maybe, with a quad-signal instead of step/dir it will be better. but then I need
a quad2stepdir-converter...
an arduino?....
 *thinkig*.....
*thinkig*.....
also a nice idea!
now a period of 80.000 ist possible.
analyzing the squarewave is a little bit confusing me:
__--___--____--___
the high-level-timespan is always 80usec (between 78.5 and 81)
thas OK.
but the low-level-timespan differs much more. (beween 160usec an 320usec)
the time-period... thats not nice....
maybe, with a quad-signal instead of step/dir it will be better. but then I need
a quad2stepdir-converter...
an arduino?....
Attachments:
Last edit: 05 Aug 2019 17:07 by wicki. Reason: fipptehler
Please Log in or Create an account to join the conversation.
- Bari
-
- Offline
- Platinum Member
-
Less
More
- Posts: 639
- Thank you received: 234
05 Aug 2019 19:07 - 05 Aug 2019 19:28 #141436
by Bari
Replied by Bari on topic Raspberry Pi 4
Looks like heat is going to be an issue with the Rpi 4. I noticed mine running pretty hot out in the open with just convection cooling and no heat spreader.
This is easily and cheaply solved with a heat spreader or with a bit more expense and lower reliability with a fan. Proper enclosure design for long life will be important. Heat spreader connected to metal enclosure will work.
There is already a long discussion on the pi forums about this (if you can stand reading it)
www.raspberrypi.org/forums/viewtopic.php?f=28&t=243500
This is easily and cheaply solved with a heat spreader or with a bit more expense and lower reliability with a fan. Proper enclosure design for long life will be important. Heat spreader connected to metal enclosure will work.
There is already a long discussion on the pi forums about this (if you can stand reading it)
www.raspberrypi.org/forums/viewtopic.php?f=28&t=243500
Last edit: 05 Aug 2019 19:28 by Bari.
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-
Less
More
- Posts: 1317
- Thank you received: 453
05 Aug 2019 19:30 #141439
by Hakan
What is a possible, usable step-rate?
Replied by Hakan on topic Raspberry Pi 4
>
now a period of 80.000 ist possible.
What is a possible, usable step-rate?
Please Log in or Create an account to join the conversation.
- Bari
-
- Offline
- Platinum Member
-
Less
More
- Posts: 639
- Thank you received: 234
05 Aug 2019 19:49 #141442
by Bari
Replied by Bari on topic Raspberry Pi 4
I'm not sure what you are measuring yet. Are you measuring all the duration of all the intervals between pulse edges falling and rising, just rising or just falling or?
Please Log in or Create an account to join the conversation.
Time to create page: 0.213 seconds