Remora - ethernet NVEM / EC300 / EC500 cnc board
- zmrdko
-

- Offline
- Elite Member
-

Less
More
- Posts: 186
- Thank you received: 49
03 Apr 2023 08:45 - 03 Apr 2023 09:37 #268154
by zmrdko
Replied by zmrdko on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Thanks.
I have RT-1052 based EC500 board.
I tried to pick settings for X axis and joint 0.
Slowing down did help a little, but I still get random following joint 0 errors.
I don't understand, if I don't need to set base period. (in default config its 0 as well as in yours)
EC500 should be capable of 460kHz stepping rate.
I'm trying to set up JMC servo with 5000 steps per rotation on 5mm pitched screw with max speed of 100mm/s.
That would make an stepping rate of 100kHz.
My current PC latencies are ~80000 for servo thread and ~80000 for base thread while playing some 4k video and 5glxgears.
(intel i5 6500, 16GB Ram, onboard GPU)
Does it even matter, since the stepping should be done on the EC500 board? (is this why base thread is 0 in default ini file?)
also there is some weird behavior: the axis moves with correct velocity. But it never reaches the exact target, only slowly crawls close to it. (See attached video )
Somebody here described similar issue. If I recall correctly, it has to do something with deadband?
I have RT-1052 based EC500 board.
I tried to pick settings for X axis and joint 0.
Slowing down did help a little, but I still get random following joint 0 errors.
I don't understand, if I don't need to set base period. (in default config its 0 as well as in yours)
EC500 should be capable of 460kHz stepping rate.
I'm trying to set up JMC servo with 5000 steps per rotation on 5mm pitched screw with max speed of 100mm/s.
That would make an stepping rate of 100kHz.
My current PC latencies are ~80000 for servo thread and ~80000 for base thread while playing some 4k video and 5glxgears.
(intel i5 6500, 16GB Ram, onboard GPU)
Does it even matter, since the stepping should be done on the EC500 board? (is this why base thread is 0 in default ini file?)
also there is some weird behavior: the axis moves with correct velocity. But it never reaches the exact target, only slowly crawls close to it. (See attached video )
Somebody here described similar issue. If I recall correctly, it has to do something with deadband?
Last edit: 03 Apr 2023 09:37 by zmrdko. Reason: Added video
Please Log in or Create an account to join the conversation.
- frayja2002
- Offline
- Premium Member
-

Less
More
- Posts: 159
- Thank you received: 13
04 Apr 2023 11:38 #268251
by frayja2002
Replied by frayja2002 on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
If you have a look in the .ini file from the previous post, on line 144 at the end of the [AXIS_X] section you will see the pgain value that I put into mine to cure this.
There is a corresponding line required in the .hal file on line 66 in this case. This sets the appropriate remora hal pin.
This worked for me using stepper motors using a 4mm pitch lead screw. You'll have to play with this to see what works for you.
If you are feeding the encoders back into the EC500 you might want to have a look at one of the earlier posts in this thread for the other remora pins that affect the PID tuning & you might have to do some proper PID tuning (which I have never done)
Alex
There is a corresponding line required in the .hal file on line 66 in this case. This sets the appropriate remora hal pin.
This worked for me using stepper motors using a 4mm pitch lead screw. You'll have to play with this to see what works for you.
If you are feeding the encoders back into the EC500 you might want to have a look at one of the earlier posts in this thread for the other remora pins that affect the PID tuning & you might have to do some proper PID tuning (which I have never done)
Alex
Please Log in or Create an account to join the conversation.
- zmrdko
-
- Offline
- Elite Member
-
Less
More
- Posts: 186
- Thank you received: 49
04 Apr 2023 11:51 #268253
by zmrdko
Replied by zmrdko on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Actually JMC integrated servos dont have any feedback so its basically open loop mode just like stepper motor. My bad. I did not described this. So, there is no feedback back to EC500
Please Log in or Create an account to join the conversation.
- scotta
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 959
- Thank you received: 489
07 Apr 2023 00:08 #268469
by scotta
Replied by scotta on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
The Remora firmware for the RT1052 NVEM / EC300 / EC500 is still only running a base thread frequency of 40kHz. So you will need to work within the current limitation until this is increased, which you could try by compiling your own version and changing the PRU_BASEFREQ in configuration.h. The RT1052 running at +500Mhz should easily do a faster thread, I just have not got around to testing.
I'll also be revisiting the DMA step generation once I've got a few other things completed.
I'll also be revisiting the DMA step generation once I've got a few other things completed.
Please Log in or Create an account to join the conversation.
- scotta
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 959
- Thank you received: 489
07 Apr 2023 01:48 #268478
by scotta
Replied by scotta on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
An Easter gift for EC500 users. I have just pushed a dedicated firmware for the EC500 to the main branch.
github.com/scottalford75/Remora-RT1052/b...t1052-EC500-beta.bin
All of the IO except for the MPG is now available. Inputs are numbered sequentially matching the headers. ie FHA = remora.input.0 through to IN16 = remora.input.19
Similarly the outputs are remora.output.0 to 15
The MPG inputs are a bit of a mystery still as I have not been successful in scanning the IO ports for these. For most people the 16 inputs and outputs should be more than enough.
Happy Easter!
github.com/scottalford75/Remora-RT1052/b...t1052-EC500-beta.bin
All of the IO except for the MPG is now available. Inputs are numbered sequentially matching the headers. ie FHA = remora.input.0 through to IN16 = remora.input.19
Similarly the outputs are remora.output.0 to 15
The MPG inputs are a bit of a mystery still as I have not been successful in scanning the IO ports for these. For most people the 16 inputs and outputs should be more than enough.
Happy Easter!
The following user(s) said Thank You: tommylight, zmrdko
Please Log in or Create an account to join the conversation.
- zmrdko
-
- Offline
- Elite Member
-
Less
More
- Posts: 186
- Thank you received: 49
07 Apr 2023 11:35 - 07 Apr 2023 11:37 #268504
by zmrdko
Replied by zmrdko on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Thanks!!
I have flashed new firmware already. Unfortunately I'm still at early stage with linuxcnc.
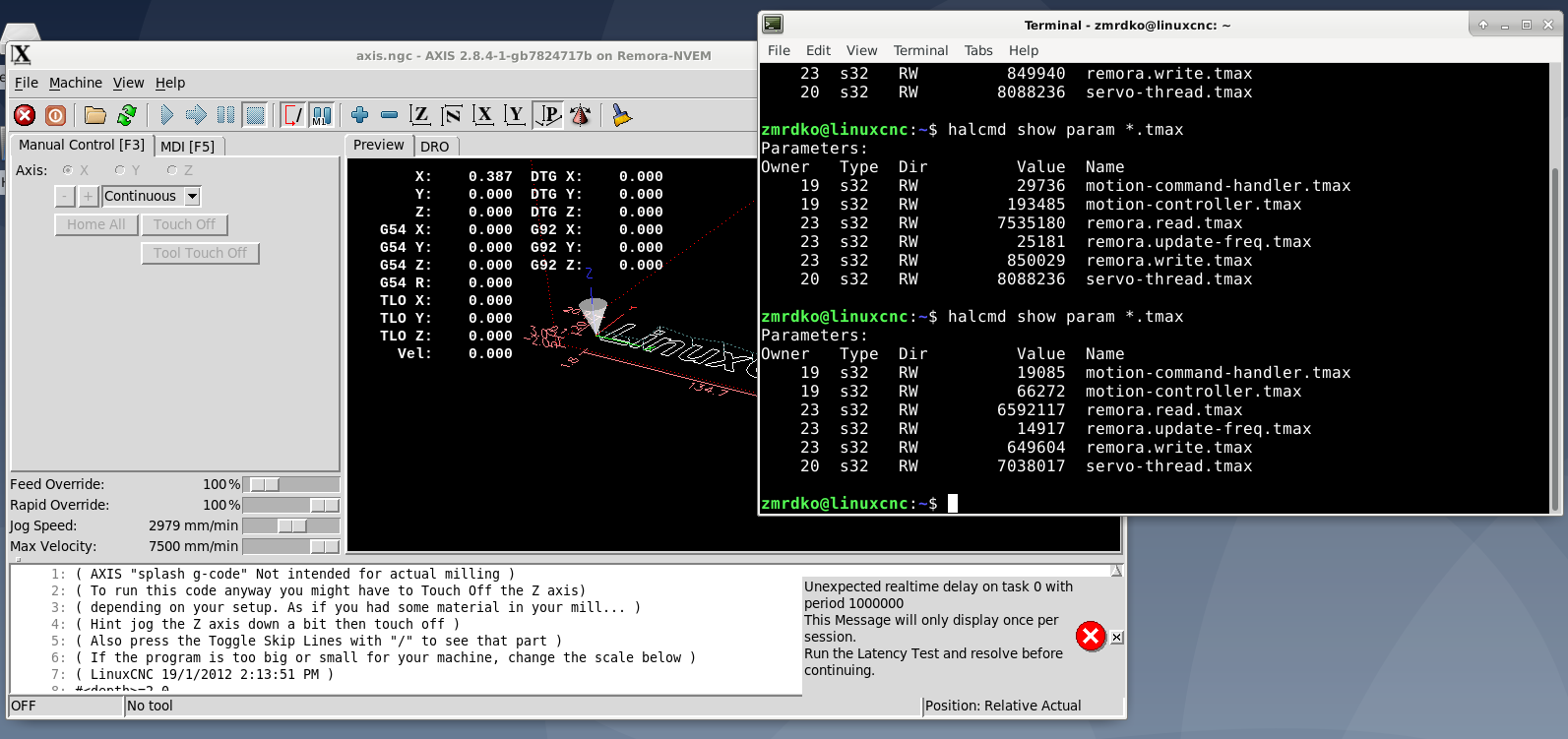
The current problem is that I'm struggling with unexpected latency delays:
I'm running LinuxCNC 2.8.4 Debian 10 Buster PREEMPT-RT ISO.
I have EC500 with RT1052 and PC is HP Prodesk 400 G4 with i5 6500 4c/4t and isolcpus=2,3, 16GB Ram and integrated graphics.
I am getting latency under 80k with dozen of glxgears and 4k video in background.

But I think there are some spikes in servo thread, when I toggle machine power (F2) ON in linuxcnc.
What am I doing wrong, or am I missing something?
I have flashed new firmware already. Unfortunately I'm still at early stage with linuxcnc.
The current problem is that I'm struggling with unexpected latency delays:
I'm running LinuxCNC 2.8.4 Debian 10 Buster PREEMPT-RT ISO.
I have EC500 with RT1052 and PC is HP Prodesk 400 G4 with i5 6500 4c/4t and isolcpus=2,3, 16GB Ram and integrated graphics.
I am getting latency under 80k with dozen of glxgears and 4k video in background.
But I think there are some spikes in servo thread, when I toggle machine power (F2) ON in linuxcnc.
What am I doing wrong, or am I missing something?
Last edit: 07 Apr 2023 11:37 by zmrdko.
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21768
- Thank you received: 7440
07 Apr 2023 12:11 #268506
by tommylight
Replied by tommylight on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Those are terribly bad numbers! 
In BIOS, disable hyperthreading, speed step, turbo, virtualisation, C states, everything with power saving, PCI-E aggressive something or another??, etc.
Might also be due to thermal throttling of the processor, or failing hard drive or memory, based on those numbers.
In BIOS, disable hyperthreading, speed step, turbo, virtualisation, C states, everything with power saving, PCI-E aggressive something or another??, etc.
Might also be due to thermal throttling of the processor, or failing hard drive or memory, based on those numbers.
Please Log in or Create an account to join the conversation.
- meister
- Offline
- Platinum Member
-
Less
More
- Posts: 757
- Thank you received: 478
07 Apr 2023 12:45 #268510
by meister
Replied by meister on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Hi,
first, thanks for remora")
Question: how can i invert one dir pin ?
i'm using the ec300 v5
"Board": "NVEM",
"Modules":[
{
"Thread": "Base",
"Type": "Stepgen",
"Comment": "X - Joint 0 step generator",
"Joint Number": 0,
"Step Pin": "PE_15",
"Direction Pin": "PE_14"
},
Thanks,
Olli
first, thanks for remora
Question: how can i invert one dir pin ?
i'm using the ec300 v5
"Board": "NVEM",
"Modules":[
{
"Thread": "Base",
"Type": "Stepgen",
"Comment": "X - Joint 0 step generator",
"Joint Number": 0,
"Step Pin": "PE_15",
"Direction Pin": "PE_14"
},
Thanks,
Olli
Please Log in or Create an account to join the conversation.
- scotta
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 959
- Thank you received: 489
07 Apr 2023 21:11 #268550
by scotta
Replied by scotta on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
There is no ability to invert the direction pin in firmware. If your motors are going the wrong direction then all you need to do is change the sign of the INI joint SCALE parameter, ie from +ve to -ve or visa versa.Hi,
first, thanks for remora
Question: how can i invert one dir pin ?
i'm using the ec300 v5
"Board": "NVEM",
"Modules":[
{
"Thread": "Base",
"Type": "Stepgen",
"Comment": "X - Joint 0 step generator",
"Joint Number": 0,
"Step Pin": "PE_15",
"Direction Pin": "PE_14"
},
Thanks,
Olli
The following user(s) said Thank You: meister
Please Log in or Create an account to join the conversation.
- scotta
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 959
- Thank you received: 489
07 Apr 2023 21:18 #268551
by scotta
Replied by scotta on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Getting the realtime delay when turning machine power on is "normal" when using Remora. Apparently this is because LinuxCNC is not running a base thread. I have not dug into why the error message appears, but I've just got in the habit of clearing it and carrying on.Thanks!!
I have flashed new firmware already. Unfortunately I'm still at early stage with linuxcnc.
The current problem is that I'm struggling with unexpected latency delays:
I'm running LinuxCNC 2.8.4 Debian 10 Buster PREEMPT-RT ISO.
I have EC500 with RT1052 and PC is HP Prodesk 400 G4 with i5 6500 4c/4t and isolcpus=2,3, 16GB Ram and integrated graphics.
I am getting latency under 80k with dozen of glxgears and 4k video in background.
The following user(s) said Thank You: rodw
Please Log in or Create an account to join the conversation.
Time to create page: 0.398 seconds