Closed loop with linear encoders but still backlash?
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19861
- Thank you received: 4636
28 Jan 2020 20:08 #156042
by andypugh
Replied by andypugh on topic Closed loop with linear encoders but still backlash?
If you move the 3D-Taster off of the test piece, does it stay at zero?
I am not 100% sure that these are zero-deflection devices. (touch probes are not)
What is your actual process for compensating for the tip diameter?
I am not 100% sure that these are zero-deflection devices. (touch probes are not)
What is your actual process for compensating for the tip diameter?
Please Log in or Create an account to join the conversation.
- Ronald J
-

- Offline
- New Member
-

Less
More
- Posts: 13
- Thank you received: 0
01 Nov 2020 19:43 - 03 Nov 2020 21:47 #188037
by Ronald J
Replied by Ronald J on topic Closed loop with linear encoders but still backlash?
Dear Gnevko,
I reach out to you, as you are one of the few users who have found a way to make LinuxCNC work using Linear-Encoders as part of the feedback loop.
I am in the beginning of converting my Lathe, but simply can not find any guidance in what steps/sequence one should start configuring LinuxCNC when adding Linear-Scales to your CNC-Setup.
If you had to do it all over, in what steps would you recommend, editing/changing/adding what to the LinuxCNC configuration, to get the feedback-loop working & Tuning of that loop ?
I would love to find a basic manual on how this process looks like (for dummies & beginners), or even create one for this forum, once I can gather all the feedback from the best experts in these rounds, and then tried it out for myself.
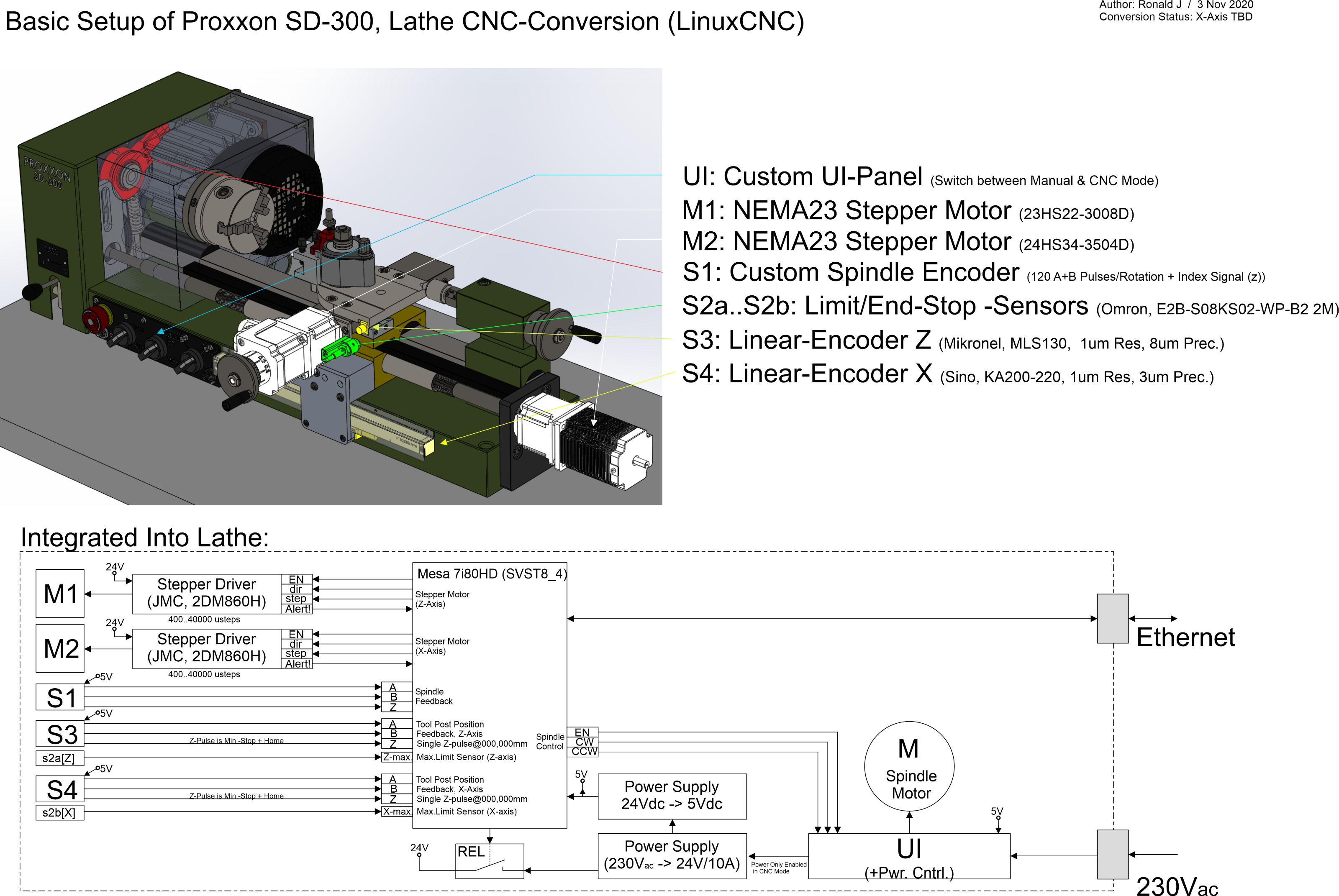
Added 3 Nov 2020:
I refer to a basic setup using Stepper-motors & Feedback Sensors, in combination with any capable Mesa Card:
BR,
Ronald
I reach out to you, as you are one of the few users who have found a way to make LinuxCNC work using Linear-Encoders as part of the feedback loop.
I am in the beginning of converting my Lathe, but simply can not find any guidance in what steps/sequence one should start configuring LinuxCNC when adding Linear-Scales to your CNC-Setup.
If you had to do it all over, in what steps would you recommend, editing/changing/adding what to the LinuxCNC configuration, to get the feedback-loop working & Tuning of that loop ?
I would love to find a basic manual on how this process looks like (for dummies & beginners), or even create one for this forum, once I can gather all the feedback from the best experts in these rounds, and then tried it out for myself.
Added 3 Nov 2020:
I refer to a basic setup using Stepper-motors & Feedback Sensors, in combination with any capable Mesa Card:
BR,
Ronald
Attachments:
Last edit: 03 Nov 2020 21:47 by Ronald J.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19861
- Thank you received: 4636
03 Nov 2020 14:50 #188229
by andypugh
Replied by andypugh on topic Closed loop with linear encoders but still backlash?
How you do this depends very much on the hardware you have.
I assume that you have encoders on the motors and also linear scales?
What type of servo drive is it? Does the servo drive work in torque, velocity or position mode? What type of command signal does it use?
I assume that you have encoders on the motors and also linear scales?
What type of servo drive is it? Does the servo drive work in torque, velocity or position mode? What type of command signal does it use?
Please Log in or Create an account to join the conversation.
- Ronald J
-
- Offline
- New Member
-
Less
More
- Posts: 13
- Thank you received: 0
03 Nov 2020 21:49 #188268
by Ronald J
Replied by Ronald J on topic Closed loop with linear encoders but still backlash?
Thank you AndyPugh for your reply.
I added a functional Diagram to my initial post, so the basic info is there.
If any other questions pop-up, please let me know.
Best regards,
Ronald
I added a functional Diagram to my initial post, so the basic info is there.
If any other questions pop-up, please let me know.
Best regards,
Ronald
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19861
- Thank you received: 4636
03 Nov 2020 23:52 #188281
by andypugh
Replied by andypugh on topic Closed loop with linear encoders but still backlash?
Adding the scales to the system might be very easy in this case.
PNCConf will probably add a PID component to the system (because that helps absorb the effects of jitter on an open-loop stepper system.
All you need to do is change the HAL to disconnect the PID feedback from the stepgen position feedback pin to the scale position pin.
And then add a small amount of P and I to the PID until the following error disappears.
The axis.L.motor-pos-fb and joint.N.motor-pos-fb pins also want to become connected to the scale output rather than the stepgen internal feedback too.
PNCConf will probably add a PID component to the system (because that helps absorb the effects of jitter on an open-loop stepper system.
All you need to do is change the HAL to disconnect the PID feedback from the stepgen position feedback pin to the scale position pin.
And then add a small amount of P and I to the PID until the following error disappears.
The axis.L.motor-pos-fb and joint.N.motor-pos-fb pins also want to become connected to the scale output rather than the stepgen internal feedback too.
The following user(s) said Thank You: Ronald J
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4712
- Thank you received: 2106
04 Nov 2020 06:21 #188289
by Aciera
Replied by Aciera on topic Closed loop with linear encoders but still backlash?
I use a closed loop stepper with glassscales on my mill.
The following user(s) said Thank You: Ronald J
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19861
- Thank you received: 4636
04 Nov 2020 08:57 #188297
by andypugh
I see that you are using velocity-mode stepgens. Have you tried position-mode with added PID for corrections only? A tight position loop in the drive might be better than the velocity loop in the drive (or, quite possibly,not)
I have forgotten what the PNCConf setup for Mesa stepgens uses.
I imagine that both will work well, but one or the other might be subtly better on some machines.
Replied by andypugh on topic Closed loop with linear encoders but still backlash?
I use a closed loop stepper with glassscales on my mill.
I see that you are using velocity-mode stepgens. Have you tried position-mode with added PID for corrections only? A tight position loop in the drive might be better than the velocity loop in the drive (or, quite possibly,not)
I have forgotten what the PNCConf setup for Mesa stepgens uses.
I imagine that both will work well, but one or the other might be subtly better on some machines.
Please Log in or Create an account to join the conversation.
- cmorley
- Offline
- Moderator
-
Less
More
- Posts: 7316
- Thank you received: 2147
04 Nov 2020 10:23 #188298
by cmorley
Replied by cmorley on topic Closed loop with linear encoders but still backlash?
Aciera:
I see you addf mesa cards read and write functions consecutively.
the addf order sets the order the component functions are run.
The write should be after all the other components.
The way you have it the output is always one thread loop behind the calculations.
Might make some small difference.
Andy:
Pncconf uses velocity mode. Position mode has some tracking problems in some cases, though I never tried it with feedback corrections.
I see you addf mesa cards read and write functions consecutively.
the addf order sets the order the component functions are run.
The write should be after all the other components.
The way you have it the output is always one thread loop behind the calculations.
Might make some small difference.
Andy:
Pncconf uses velocity mode. Position mode has some tracking problems in some cases, though I never tried it with feedback corrections.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4712
- Thank you received: 2106
04 Nov 2020 12:17 #188305
by Aciera
Replied by Aciera on topic Closed loop with linear encoders but still backlash?
Haven't tried position mode for the stepgens. I'm really quite happy with how it runs but I'll keep it in mind to play with that on a rainy sunday.
Chris:
Thanks for the heads up. Makes sense now that you mention it. I probably put it there to make it neat and tidy.
So I will certainly move it below all the other components.
Chris:
Thanks for the heads up. Makes sense now that you mention it. I probably put it there to make it neat and tidy.
So I will certainly move it below all the other components.
Please Log in or Create an account to join the conversation.
- Ronald J
-
- Offline
- New Member
-
Less
More
- Posts: 13
- Thank you received: 0
05 Nov 2020 17:49 #188416
by Ronald J
Replied by Ronald J on topic Closed loop with linear encoders but still backlash?
Dear Andypugh,
According to your reply, you must be an expert using Linuxcnc. Please do not burn me , but I have a somewhat stupid question.
, but I have a somewhat stupid question.
Your reply gave me the confidence to now finally buy all the components required, and start "playing". So I started with my biggest challange, "what" MESA card to buy. I installed and played around with pncconf (Linuxcnc 2.8), to find out, that I most probably need the 7i80HD Card.
It was a "walk in the park" assigning almost all my machine Signals in the pncconf-tool. Then I found out, I can not assign the Spindle-Encoder A,B & Z Signals to any of the pins inside the pncconf tool... then I started to look at the documentation of the 7i80HD, and found out, that the ports&Pins inside PNCconfig, do not correspond with the Hardware manual of the 7i80HD ... so:
... so:
I tried visualize the Details here:
1-What am I doing wrong ? And is a manual assigning of Machine-IO's to MESA-Cards, the "normal" way of configuration ?
2-If a Manual Assignment of MESA-Card-Pins, to my CNC-Machine-IO's needs to be done after all, what would then hinder me in using the 7i98 Card, that is only half of the price of a 7i80HD ?
Kind regards, R.
According to your reply, you must be an expert using Linuxcnc. Please do not burn me
, but I have a somewhat stupid question.Your reply gave me the confidence to now finally buy all the components required, and start "playing". So I started with my biggest challange, "what" MESA card to buy. I installed and played around with pncconf (Linuxcnc 2.8), to find out, that I most probably need the 7i80HD Card.
It was a "walk in the park" assigning almost all my machine Signals in the pncconf-tool. Then I found out, I can not assign the Spindle-Encoder A,B & Z Signals to any of the pins inside the pncconf tool... then I started to look at the documentation of the 7i80HD, and found out, that the ports&Pins inside PNCconfig, do not correspond with the Hardware manual of the 7i80HD
... so:I tried visualize the Details here:
1-What am I doing wrong ? And is a manual assigning of Machine-IO's to MESA-Cards, the "normal" way of configuration ?
2-If a Manual Assignment of MESA-Card-Pins, to my CNC-Machine-IO's needs to be done after all, what would then hinder me in using the 7i98 Card, that is only half of the price of a 7i80HD ?
Kind regards, R.
Attachments:
Please Log in or Create an account to join the conversation.
Time to create page: 0.671 seconds