6040 7i76 Conversion
- PCW
-

- Away
- Moderator
-

Less
More
- Posts: 17997
- Thank you received: 5284
06 Aug 2023 21:08 #277167
by PCW
Replied by PCW on topic 6040 7i76 Conversion
Right, so the spindle stepgen should be deleted from the setup
When you get 3.98V, what is the spindle speed set to?
Printing the results of
halcmd show all spindle > spindle.txt might help debug further
When you get 3.98V, what is the spindle speed set to?
Printing the results of
halcmd show all spindle > spindle.txt might help debug further
Please Log in or Create an account to join the conversation.
- spacestate1
- Offline
- Senior Member
-

Less
More
- Posts: 59
- Thank you received: 10
06 Aug 2023 22:07 #277170
by spacestate1
Replied by spacestate1 on topic 6040 7i76 Conversion
removed the spindle stuff from the conf
here's what I get when the spindle is running and 3.98v is seen on the VFD
cat spindle.txt
Loaded HAL Components:
ID Type Name PID State
Component Pins:
Owner Type Dir Value Name
29 bit IN FALSE spindle.0.amp-fault-in
29 bit IN TRUE spindle.0.at-speed <== spindle-at-speed
29 bit OUT FALSE spindle.0.brake ==> spindle-brake
29 bit OUT FALSE spindle.0.forward ==> spindle-cw
29 bit I/O FALSE spindle.0.index-enable <=> spindle-index-enable
29 bit IN FALSE spindle.0.inhibit
29 bit IN FALSE spindle.0.is-oriented
29 bit OUT FALSE spindle.0.locked
29 bit OUT TRUE spindle.0.on ==> spindle-enable
29 bit OUT FALSE spindle.0.orient
29 float OUT 0 spindle.0.orient-angle
29 s32 IN 0 spindle.0.orient-fault
29 s32 OUT 0 spindle.0.orient-mode
29 bit OUT TRUE spindle.0.reverse ==> spindle-ccw
29 float IN 0 spindle.0.revs <== spindle-revs
29 float OUT -5.016667 spindle.0.speed-cmd-rps
29 float IN 0 spindle.0.speed-in <== spindle-vel-fb-rps
29 float OUT -301 spindle.0.speed-out ==> spindle-vel-cmd-rpm
29 float OUT 301 spindle.0.speed-out-abs ==> spindle-vel-cmd-rpm-abs
29 float OUT -5.016667 spindle.0.speed-out-rps ==> spindle-vel-cmd-rps
29 float OUT 5.016667 spindle.0.speed-out-rps-abs ==> spindle-vel-cmd-rps-abs
Pin Aliases:
Alias Original Name
Signals:
Type Value Name (linked to)
bit TRUE spindle-at-speed
==> spindle.0.at-speed
bit FALSE spindle-brake
<== spindle.0.brake
bit TRUE spindle-ccw
==> hm2_7i92.0.7i76.0.0.spindir
<== spindle.0.reverse
bit FALSE spindle-cw
<== spindle.0.forward
bit TRUE spindle-enable
==> hm2_7i92.0.7i76.0.0.spinena
==> pid.s.enable
<== spindle.0.on
bit FALSE spindle-index-enable
==> pid.s.index-enable
<=> spindle.0.index-enable
bit FALSE spindle-manual-ccw
==> halui.spindle.0.reverse
bit FALSE spindle-manual-cw
==> halui.spindle.0.forward
bit FALSE spindle-manual-stop
==> halui.spindle.0.stop
float -301 spindle-output
==> hm2_7i92.0.7i76.0.0.spinout
<== pid.s.output
float 0 spindle-revs
==> spindle.0.revs
float -301 spindle-vel-cmd-rpm
==> pid.s.command
<== spindle.0.speed-out
float 301 spindle-vel-cmd-rpm-abs
<== spindle.0.speed-out-abs
float -5.016667 spindle-vel-cmd-rps
<== spindle.0.speed-out-rps
float 5.016667 spindle-vel-cmd-rps-abs
<== spindle.0.speed-out-rps-abs
float 0 spindle-vel-fb-rpm
==> pid.s.feedback
float 0 spindle-vel-fb-rps
==> spindle.0.speed-in
Parameters:
Owner Type Dir Value Name
Parameter Aliases:
Alias Original Name
Exported Functions:
Owner CodeAddr Arg FP Users Name
Realtime Threads:
Period FP Name ( Time, Max-Time )
here's what I get when the spindle is running and 3.98v is seen on the VFD
cat spindle.txt
Loaded HAL Components:
ID Type Name PID State
Component Pins:
Owner Type Dir Value Name
29 bit IN FALSE spindle.0.amp-fault-in
29 bit IN TRUE spindle.0.at-speed <== spindle-at-speed
29 bit OUT FALSE spindle.0.brake ==> spindle-brake
29 bit OUT FALSE spindle.0.forward ==> spindle-cw
29 bit I/O FALSE spindle.0.index-enable <=> spindle-index-enable
29 bit IN FALSE spindle.0.inhibit
29 bit IN FALSE spindle.0.is-oriented
29 bit OUT FALSE spindle.0.locked
29 bit OUT TRUE spindle.0.on ==> spindle-enable
29 bit OUT FALSE spindle.0.orient
29 float OUT 0 spindle.0.orient-angle
29 s32 IN 0 spindle.0.orient-fault
29 s32 OUT 0 spindle.0.orient-mode
29 bit OUT TRUE spindle.0.reverse ==> spindle-ccw
29 float IN 0 spindle.0.revs <== spindle-revs
29 float OUT -5.016667 spindle.0.speed-cmd-rps
29 float IN 0 spindle.0.speed-in <== spindle-vel-fb-rps
29 float OUT -301 spindle.0.speed-out ==> spindle-vel-cmd-rpm
29 float OUT 301 spindle.0.speed-out-abs ==> spindle-vel-cmd-rpm-abs
29 float OUT -5.016667 spindle.0.speed-out-rps ==> spindle-vel-cmd-rps
29 float OUT 5.016667 spindle.0.speed-out-rps-abs ==> spindle-vel-cmd-rps-abs
Pin Aliases:
Alias Original Name
Signals:
Type Value Name (linked to)
bit TRUE spindle-at-speed
==> spindle.0.at-speed
bit FALSE spindle-brake
<== spindle.0.brake
bit TRUE spindle-ccw
==> hm2_7i92.0.7i76.0.0.spindir
<== spindle.0.reverse
bit FALSE spindle-cw
<== spindle.0.forward
bit TRUE spindle-enable
==> hm2_7i92.0.7i76.0.0.spinena
==> pid.s.enable
<== spindle.0.on
bit FALSE spindle-index-enable
==> pid.s.index-enable
<=> spindle.0.index-enable
bit FALSE spindle-manual-ccw
==> halui.spindle.0.reverse
bit FALSE spindle-manual-cw
==> halui.spindle.0.forward
bit FALSE spindle-manual-stop
==> halui.spindle.0.stop
float -301 spindle-output
==> hm2_7i92.0.7i76.0.0.spinout
<== pid.s.output
float 0 spindle-revs
==> spindle.0.revs
float -301 spindle-vel-cmd-rpm
==> pid.s.command
<== spindle.0.speed-out
float 301 spindle-vel-cmd-rpm-abs
<== spindle.0.speed-out-abs
float -5.016667 spindle-vel-cmd-rps
<== spindle.0.speed-out-rps
float 5.016667 spindle-vel-cmd-rps-abs
<== spindle.0.speed-out-rps-abs
float 0 spindle-vel-fb-rpm
==> pid.s.feedback
float 0 spindle-vel-fb-rps
==> spindle.0.speed-in
Parameters:
Owner Type Dir Value Name
Parameter Aliases:
Alias Original Name
Exported Functions:
Owner CodeAddr Arg FP Users Name
Realtime Threads:
Period FP Name ( Time, Max-Time )
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17997
- Thank you received: 5284
06 Aug 2023 22:18 - 06 Aug 2023 22:21 #277172
by PCW
Replied by PCW on topic 6040 7i76 Conversion
Looks like you selected the "use +-10 for direction" spindle option in pncconf:
float -301 spindle-vel-cmd-rpm
==> pid.s.command
<== spindle.0.speed-out
This does not work because the 7I76 spindle interface expects only unsigned (positive) values
A quick fix is to replace
net spindle-vel-cmd-rpm => pid.s.command
with
net spindle-vel-cmd-rpm-abs => pid.s.command
float -301 spindle-vel-cmd-rpm
==> pid.s.command
<== spindle.0.speed-out
This does not work because the 7I76 spindle interface expects only unsigned (positive) values
A quick fix is to replace
net spindle-vel-cmd-rpm => pid.s.command
with
net spindle-vel-cmd-rpm-abs => pid.s.command
Last edit: 06 Aug 2023 22:21 by PCW.
Please Log in or Create an account to join the conversation.
- spacestate1
- Offline
- Senior Member
-
Less
More
- Posts: 59
- Thank you received: 10
07 Aug 2023 00:09 #277179
by spacestate1
Replied by spacestate1 on topic 6040 7i76 Conversion
made the change and went back to the config wizard and tried a couple other settings, but it still gets the same behavior:
# Generated by PNCconf at Sun Aug 6 20:07:31 2023
# Using LinuxCNC version: 2.8
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
loadrt hostmot2
loadrt hm2_eth board_ip="192.168.1.121" config="num_encoders=1 num_pwmgens=0 num_stepgens=5 sserial_port_0=00xxxxxx"
setp hm2_7i92.0.watchdog.timeout_ns 5000000
loadrt pid names=pid.x,pid.y,pid.z,pid.s
loadrt near
addf hm2_7i92.0.read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pid.x.do-pid-calcs servo-thread
addf pid.y.do-pid-calcs servo-thread
addf pid.z.do-pid-calcs servo-thread
addf pid.s.do-pid-calcs servo-thread
addf near.0 servo-thread
addf hm2_7i92.0.write servo-thread
setp hm2_7i92.0.dpll.01.timer-us -50
setp hm2_7i92.0.stepgen.timer-number 1
# external output signals
# external input signals
#*******************
# AXIS X JOINT 0
#*******************
setp pid.x.Pgain [JOINT_0]P
setp pid.x.Igain [JOINT_0]I
setp pid.x.Dgain [JOINT_0]D
setp pid.x.bias [JOINT_0]BIAS
setp pid.x.FF0 [JOINT_0]FF0
setp pid.x.FF1 [JOINT_0]FF1
setp pid.x.FF2 [JOINT_0]FF2
setp pid.x.deadband [JOINT_0]DEADBAND
setp pid.x.maxoutput [JOINT_0]MAX_OUTPUT
setp pid.x.error-previous-target true
# This setting is to limit bogus stepgen
# velocity corrections caused by position
# feedback sample time jitter.
setp pid.x.maxerror 0.012700
net x-index-enable => pid.x.index-enable
net x-enable => pid.x.enable
net x-pos-cmd => pid.x.command
net x-pos-fb => pid.x.feedback
net x-output <= pid.x.output
# Step Gen signals/setup
setp hm2_7i92.0.stepgen.00.dirsetup [JOINT_0]DIRSETUP
setp hm2_7i92.0.stepgen.00.dirhold [JOINT_0]DIRHOLD
setp hm2_7i92.0.stepgen.00.steplen [JOINT_0]STEPLEN
setp hm2_7i92.0.stepgen.00.stepspace [JOINT_0]STEPSPACE
setp hm2_7i92.0.stepgen.00.position-scale [JOINT_0]STEP_SCALE
setp hm2_7i92.0.stepgen.00.step_type 0
setp hm2_7i92.0.stepgen.00.control-type 1
setp hm2_7i92.0.stepgen.00.maxaccel [JOINT_0]STEPGEN_MAXACCEL
setp hm2_7i92.0.stepgen.00.maxvel [JOINT_0]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net x-pos-cmd <= joint.0.motor-pos-cmd
net x-vel-cmd <= joint.0.vel-cmd
net x-output => hm2_7i92.0.stepgen.00.velocity-cmd
net x-pos-fb <= hm2_7i92.0.stepgen.00.position-fb
net x-pos-fb => joint.0.motor-pos-fb
net x-enable <= joint.0.amp-enable-out
net x-enable => hm2_7i92.0.stepgen.00.enable
# ---setup home / limit switch signals---
net x-home-sw => joint.0.home-sw-in
net x-neg-limit => joint.0.neg-lim-sw-in
net x-pos-limit => joint.0.pos-lim-sw-in
#*******************
# AXIS Y JOINT 1
#*******************
setp pid.y.Pgain [JOINT_1]P
setp pid.y.Igain [JOINT_1]I
setp pid.y.Dgain [JOINT_1]D
setp pid.y.bias [JOINT_1]BIAS
setp pid.y.FF0 [JOINT_1]FF0
setp pid.y.FF1 [JOINT_1]FF1
setp pid.y.FF2 [JOINT_1]FF2
setp pid.y.deadband [JOINT_1]DEADBAND
setp pid.y.maxoutput [JOINT_1]MAX_OUTPUT
setp pid.y.error-previous-target true
# This setting is to limit bogus stepgen
# velocity corrections caused by position
# feedback sample time jitter.
setp pid.y.maxerror 0.012700
net y-index-enable => pid.y.index-enable
net y-enable => pid.y.enable
net y-pos-cmd => pid.y.command
net y-pos-fb => pid.y.feedback
net y-output <= pid.y.output
# Step Gen signals/setup
setp hm2_7i92.0.stepgen.01.dirsetup [JOINT_1]DIRSETUP
setp hm2_7i92.0.stepgen.01.dirhold [JOINT_1]DIRHOLD
setp hm2_7i92.0.stepgen.01.steplen [JOINT_1]STEPLEN
setp hm2_7i92.0.stepgen.01.stepspace [JOINT_1]STEPSPACE
setp hm2_7i92.0.stepgen.01.position-scale [JOINT_1]STEP_SCALE
setp hm2_7i92.0.stepgen.01.step_type 0
setp hm2_7i92.0.stepgen.01.control-type 1
setp hm2_7i92.0.stepgen.01.maxaccel [JOINT_1]STEPGEN_MAXACCEL
setp hm2_7i92.0.stepgen.01.maxvel [JOINT_1]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net y-pos-cmd <= joint.1.motor-pos-cmd
net y-vel-cmd <= joint.1.vel-cmd
net y-output => hm2_7i92.0.stepgen.01.velocity-cmd
net y-pos-fb <= hm2_7i92.0.stepgen.01.position-fb
net y-pos-fb => joint.1.motor-pos-fb
net y-enable <= joint.1.amp-enable-out
net y-enable => hm2_7i92.0.stepgen.01.enable
# ---setup home / limit switch signals---
net y-home-sw => joint.1.home-sw-in
net y-neg-limit => joint.1.neg-lim-sw-in
net y-pos-limit => joint.1.pos-lim-sw-in
#*******************
# AXIS Z JOINT 2
#*******************
setp pid.z.Pgain [JOINT_2]P
setp pid.z.Igain [JOINT_2]I
setp pid.z.Dgain [JOINT_2]D
setp pid.z.bias [JOINT_2]BIAS
setp pid.z.FF0 [JOINT_2]FF0
setp pid.z.FF1 [JOINT_2]FF1
setp pid.z.FF2 [JOINT_2]FF2
setp pid.z.deadband [JOINT_2]DEADBAND
setp pid.z.maxoutput [JOINT_2]MAX_OUTPUT
setp pid.z.error-previous-target true
# This setting is to limit bogus stepgen
# velocity corrections caused by position
# feedback sample time jitter.
setp pid.z.maxerror 0.012700
net z-index-enable => pid.z.index-enable
net z-enable => pid.z.enable
net z-pos-cmd => pid.z.command
net z-pos-fb => pid.z.feedback
net z-output <= pid.z.output
# Step Gen signals/setup
setp hm2_7i92.0.stepgen.02.dirsetup [JOINT_2]DIRSETUP
setp hm2_7i92.0.stepgen.02.dirhold [JOINT_2]DIRHOLD
setp hm2_7i92.0.stepgen.02.steplen [JOINT_2]STEPLEN
setp hm2_7i92.0.stepgen.02.stepspace [JOINT_2]STEPSPACE
setp hm2_7i92.0.stepgen.02.position-scale [JOINT_2]STEP_SCALE
setp hm2_7i92.0.stepgen.02.step_type 0
setp hm2_7i92.0.stepgen.02.control-type 1
setp hm2_7i92.0.stepgen.02.maxaccel [JOINT_2]STEPGEN_MAXACCEL
setp hm2_7i92.0.stepgen.02.maxvel [JOINT_2]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net z-pos-cmd <= joint.2.motor-pos-cmd
net z-vel-cmd <= joint.2.vel-cmd
net z-output => hm2_7i92.0.stepgen.02.velocity-cmd
net z-pos-fb <= hm2_7i92.0.stepgen.02.position-fb
net z-pos-fb => joint.2.motor-pos-fb
net z-enable <= joint.2.amp-enable-out
net z-enable => hm2_7i92.0.stepgen.02.enable
# ---setup home / limit switch signals---
net z-home-sw => joint.2.home-sw-in
net z-neg-limit => joint.2.neg-lim-sw-in
net z-pos-limit => joint.2.pos-lim-sw-in
#*******************
# SPINDLE
#*******************
setp pid.s.Pgain [SPINDLE_0]P
setp pid.s.Igain [SPINDLE_0]I
setp pid.s.Dgain [SPINDLE_0]D
setp pid.s.bias [SPINDLE_0]BIAS
setp pid.s.FF0 [SPINDLE_0]FF0
setp pid.s.FF1 [SPINDLE_0]FF1
setp pid.s.FF2 [SPINDLE_0]FF2
setp pid.s.deadband [SPINDLE_0]DEADBAND
setp pid.s.maxoutput [SPINDLE_0]MAX_OUTPUT
setp pid.s.error-previous-target true
net spindle-index-enable => pid.s.index-enable
net spindle-enable => pid.s.enable
net spindle-vel-cmd-rpm-abs => pid.s.command
net spindle-vel-fb-rpm-abs => pid.s.feedback
net spindle-output <= pid.s.output
# ---digital potentiometer output signals/setup---
setp hm2_7i92.0.7i76.0.0.spinout-minlim [SPINDLE_0]OUTPUT_MIN_LIMIT
setp hm2_7i92.0.7i76.0.0.spinout-maxlim [SPINDLE_0]OUTPUT_MAX_LIMIT
setp hm2_7i92.0.7i76.0.0.spinout-scalemax [SPINDLE_0]OUTPUT_SCALE
net spindle-output => hm2_7i92.0.7i76.0.0.spinout
net spindle-enable => hm2_7i92.0.7i76.0.0.spinena
net spindle-ccw => hm2_7i92.0.7i76.0.0.spindir
# ---setup spindle control signals---
net spindle-vel-cmd-rps <= spindle.0.speed-out-rps
net spindle-vel-cmd-rps-abs <= spindle.0.speed-out-rps-abs
net spindle-vel-cmd-rpm <= spindle.0.speed-out
net spindle-vel-cmd-rpm-abs <= spindle.0.speed-out-abs
net spindle-enable <= spindle.0.on
net spindle-cw <= spindle.0.forward
net spindle-ccw <= spindle.0.reverse
net spindle-brake <= spindle.0.brake
net spindle-revs => spindle.0.revs
net spindle-at-speed => spindle.0.at-speed
net spindle-vel-fb-rps => spindle.0.speed-in
net spindle-index-enable <=> spindle.0.index-enable
# ---Setup spindle at speed signals---
sets spindle-at-speed true
#******************************
# connect miscellaneous signals
#******************************
# ---HALUI signals---
net axis-select-x halui.axis.x.select
net jog-x-pos halui.axis.x.plus
net jog-x-neg halui.axis.x.minus
net jog-x-analog halui.axis.x.analog
net x-is-homed halui.joint.0.is-homed
net axis-select-y halui.axis.y.select
net jog-y-pos halui.axis.y.plus
net jog-y-neg halui.axis.y.minus
net jog-y-analog halui.axis.y.analog
net y-is-homed halui.joint.1.is-homed
net axis-select-z halui.axis.z.select
net jog-z-pos halui.axis.z.plus
net jog-z-neg halui.axis.z.minus
net jog-z-analog halui.axis.z.analog
net z-is-homed halui.joint.2.is-homed
net jog-selected-pos halui.axis.selected.plus
net jog-selected-neg halui.axis.selected.minus
net spindle-manual-cw halui.spindle.0.forward
net spindle-manual-ccw halui.spindle.0.reverse
net spindle-manual-stop halui.spindle.0.stop
net machine-is-on halui.machine.is-on
net jog-speed halui.axis.jog-speed
net MDI-mode halui.mode.is-mdi
# ---coolant signals---
net coolant-mist <= iocontrol.0.coolant-mist
net coolant-flood <= iocontrol.0.coolant-flood
# ---probe signal---
net probe-in => motion.probe-input
# ---motion control signals---
net in-position <= motion.in-position
net machine-is-enabled <= motion.motion-enabled
# ---digital in / out signals---
# ---estop signals---
net estop-out <= iocontrol.0.user-enable-out
net estop-out => iocontrol.0.emc-enable-in
# ---manual tool change signals---
net tool-change-request <= iocontrol.0.tool-change
net tool-change-confirmed => iocontrol.0.tool-changed
net tool-number <= iocontrol.0.tool-prep-number
# ---Use external manual tool change dialog---
loadusr -W hal_manualtoolchange
net tool-change-request => hal_manualtoolchange.change
net tool-change-confirmed <= hal_manualtoolchange.changed
net tool-number => hal_manualtoolchange.number
# ---ignore tool prepare requests---
net tool-prepare-loopback iocontrol.0.tool-prepare => iocontrol.0.tool-prepared
# Generated by PNCconf at Sun Aug 6 20:07:31 2023
# Using LinuxCNC version: 2.8
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
loadrt hostmot2
loadrt hm2_eth board_ip="192.168.1.121" config="num_encoders=1 num_pwmgens=0 num_stepgens=5 sserial_port_0=00xxxxxx"
setp hm2_7i92.0.watchdog.timeout_ns 5000000
loadrt pid names=pid.x,pid.y,pid.z,pid.s
loadrt near
addf hm2_7i92.0.read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pid.x.do-pid-calcs servo-thread
addf pid.y.do-pid-calcs servo-thread
addf pid.z.do-pid-calcs servo-thread
addf pid.s.do-pid-calcs servo-thread
addf near.0 servo-thread
addf hm2_7i92.0.write servo-thread
setp hm2_7i92.0.dpll.01.timer-us -50
setp hm2_7i92.0.stepgen.timer-number 1
# external output signals
# external input signals
#*******************
# AXIS X JOINT 0
#*******************
setp pid.x.Pgain [JOINT_0]P
setp pid.x.Igain [JOINT_0]I
setp pid.x.Dgain [JOINT_0]D
setp pid.x.bias [JOINT_0]BIAS
setp pid.x.FF0 [JOINT_0]FF0
setp pid.x.FF1 [JOINT_0]FF1
setp pid.x.FF2 [JOINT_0]FF2
setp pid.x.deadband [JOINT_0]DEADBAND
setp pid.x.maxoutput [JOINT_0]MAX_OUTPUT
setp pid.x.error-previous-target true
# This setting is to limit bogus stepgen
# velocity corrections caused by position
# feedback sample time jitter.
setp pid.x.maxerror 0.012700
net x-index-enable => pid.x.index-enable
net x-enable => pid.x.enable
net x-pos-cmd => pid.x.command
net x-pos-fb => pid.x.feedback
net x-output <= pid.x.output
# Step Gen signals/setup
setp hm2_7i92.0.stepgen.00.dirsetup [JOINT_0]DIRSETUP
setp hm2_7i92.0.stepgen.00.dirhold [JOINT_0]DIRHOLD
setp hm2_7i92.0.stepgen.00.steplen [JOINT_0]STEPLEN
setp hm2_7i92.0.stepgen.00.stepspace [JOINT_0]STEPSPACE
setp hm2_7i92.0.stepgen.00.position-scale [JOINT_0]STEP_SCALE
setp hm2_7i92.0.stepgen.00.step_type 0
setp hm2_7i92.0.stepgen.00.control-type 1
setp hm2_7i92.0.stepgen.00.maxaccel [JOINT_0]STEPGEN_MAXACCEL
setp hm2_7i92.0.stepgen.00.maxvel [JOINT_0]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net x-pos-cmd <= joint.0.motor-pos-cmd
net x-vel-cmd <= joint.0.vel-cmd
net x-output => hm2_7i92.0.stepgen.00.velocity-cmd
net x-pos-fb <= hm2_7i92.0.stepgen.00.position-fb
net x-pos-fb => joint.0.motor-pos-fb
net x-enable <= joint.0.amp-enable-out
net x-enable => hm2_7i92.0.stepgen.00.enable
# ---setup home / limit switch signals---
net x-home-sw => joint.0.home-sw-in
net x-neg-limit => joint.0.neg-lim-sw-in
net x-pos-limit => joint.0.pos-lim-sw-in
#*******************
# AXIS Y JOINT 1
#*******************
setp pid.y.Pgain [JOINT_1]P
setp pid.y.Igain [JOINT_1]I
setp pid.y.Dgain [JOINT_1]D
setp pid.y.bias [JOINT_1]BIAS
setp pid.y.FF0 [JOINT_1]FF0
setp pid.y.FF1 [JOINT_1]FF1
setp pid.y.FF2 [JOINT_1]FF2
setp pid.y.deadband [JOINT_1]DEADBAND
setp pid.y.maxoutput [JOINT_1]MAX_OUTPUT
setp pid.y.error-previous-target true
# This setting is to limit bogus stepgen
# velocity corrections caused by position
# feedback sample time jitter.
setp pid.y.maxerror 0.012700
net y-index-enable => pid.y.index-enable
net y-enable => pid.y.enable
net y-pos-cmd => pid.y.command
net y-pos-fb => pid.y.feedback
net y-output <= pid.y.output
# Step Gen signals/setup
setp hm2_7i92.0.stepgen.01.dirsetup [JOINT_1]DIRSETUP
setp hm2_7i92.0.stepgen.01.dirhold [JOINT_1]DIRHOLD
setp hm2_7i92.0.stepgen.01.steplen [JOINT_1]STEPLEN
setp hm2_7i92.0.stepgen.01.stepspace [JOINT_1]STEPSPACE
setp hm2_7i92.0.stepgen.01.position-scale [JOINT_1]STEP_SCALE
setp hm2_7i92.0.stepgen.01.step_type 0
setp hm2_7i92.0.stepgen.01.control-type 1
setp hm2_7i92.0.stepgen.01.maxaccel [JOINT_1]STEPGEN_MAXACCEL
setp hm2_7i92.0.stepgen.01.maxvel [JOINT_1]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net y-pos-cmd <= joint.1.motor-pos-cmd
net y-vel-cmd <= joint.1.vel-cmd
net y-output => hm2_7i92.0.stepgen.01.velocity-cmd
net y-pos-fb <= hm2_7i92.0.stepgen.01.position-fb
net y-pos-fb => joint.1.motor-pos-fb
net y-enable <= joint.1.amp-enable-out
net y-enable => hm2_7i92.0.stepgen.01.enable
# ---setup home / limit switch signals---
net y-home-sw => joint.1.home-sw-in
net y-neg-limit => joint.1.neg-lim-sw-in
net y-pos-limit => joint.1.pos-lim-sw-in
#*******************
# AXIS Z JOINT 2
#*******************
setp pid.z.Pgain [JOINT_2]P
setp pid.z.Igain [JOINT_2]I
setp pid.z.Dgain [JOINT_2]D
setp pid.z.bias [JOINT_2]BIAS
setp pid.z.FF0 [JOINT_2]FF0
setp pid.z.FF1 [JOINT_2]FF1
setp pid.z.FF2 [JOINT_2]FF2
setp pid.z.deadband [JOINT_2]DEADBAND
setp pid.z.maxoutput [JOINT_2]MAX_OUTPUT
setp pid.z.error-previous-target true
# This setting is to limit bogus stepgen
# velocity corrections caused by position
# feedback sample time jitter.
setp pid.z.maxerror 0.012700
net z-index-enable => pid.z.index-enable
net z-enable => pid.z.enable
net z-pos-cmd => pid.z.command
net z-pos-fb => pid.z.feedback
net z-output <= pid.z.output
# Step Gen signals/setup
setp hm2_7i92.0.stepgen.02.dirsetup [JOINT_2]DIRSETUP
setp hm2_7i92.0.stepgen.02.dirhold [JOINT_2]DIRHOLD
setp hm2_7i92.0.stepgen.02.steplen [JOINT_2]STEPLEN
setp hm2_7i92.0.stepgen.02.stepspace [JOINT_2]STEPSPACE
setp hm2_7i92.0.stepgen.02.position-scale [JOINT_2]STEP_SCALE
setp hm2_7i92.0.stepgen.02.step_type 0
setp hm2_7i92.0.stepgen.02.control-type 1
setp hm2_7i92.0.stepgen.02.maxaccel [JOINT_2]STEPGEN_MAXACCEL
setp hm2_7i92.0.stepgen.02.maxvel [JOINT_2]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net z-pos-cmd <= joint.2.motor-pos-cmd
net z-vel-cmd <= joint.2.vel-cmd
net z-output => hm2_7i92.0.stepgen.02.velocity-cmd
net z-pos-fb <= hm2_7i92.0.stepgen.02.position-fb
net z-pos-fb => joint.2.motor-pos-fb
net z-enable <= joint.2.amp-enable-out
net z-enable => hm2_7i92.0.stepgen.02.enable
# ---setup home / limit switch signals---
net z-home-sw => joint.2.home-sw-in
net z-neg-limit => joint.2.neg-lim-sw-in
net z-pos-limit => joint.2.pos-lim-sw-in
#*******************
# SPINDLE
#*******************
setp pid.s.Pgain [SPINDLE_0]P
setp pid.s.Igain [SPINDLE_0]I
setp pid.s.Dgain [SPINDLE_0]D
setp pid.s.bias [SPINDLE_0]BIAS
setp pid.s.FF0 [SPINDLE_0]FF0
setp pid.s.FF1 [SPINDLE_0]FF1
setp pid.s.FF2 [SPINDLE_0]FF2
setp pid.s.deadband [SPINDLE_0]DEADBAND
setp pid.s.maxoutput [SPINDLE_0]MAX_OUTPUT
setp pid.s.error-previous-target true
net spindle-index-enable => pid.s.index-enable
net spindle-enable => pid.s.enable
net spindle-vel-cmd-rpm-abs => pid.s.command
net spindle-vel-fb-rpm-abs => pid.s.feedback
net spindle-output <= pid.s.output
# ---digital potentiometer output signals/setup---
setp hm2_7i92.0.7i76.0.0.spinout-minlim [SPINDLE_0]OUTPUT_MIN_LIMIT
setp hm2_7i92.0.7i76.0.0.spinout-maxlim [SPINDLE_0]OUTPUT_MAX_LIMIT
setp hm2_7i92.0.7i76.0.0.spinout-scalemax [SPINDLE_0]OUTPUT_SCALE
net spindle-output => hm2_7i92.0.7i76.0.0.spinout
net spindle-enable => hm2_7i92.0.7i76.0.0.spinena
net spindle-ccw => hm2_7i92.0.7i76.0.0.spindir
# ---setup spindle control signals---
net spindle-vel-cmd-rps <= spindle.0.speed-out-rps
net spindle-vel-cmd-rps-abs <= spindle.0.speed-out-rps-abs
net spindle-vel-cmd-rpm <= spindle.0.speed-out
net spindle-vel-cmd-rpm-abs <= spindle.0.speed-out-abs
net spindle-enable <= spindle.0.on
net spindle-cw <= spindle.0.forward
net spindle-ccw <= spindle.0.reverse
net spindle-brake <= spindle.0.brake
net spindle-revs => spindle.0.revs
net spindle-at-speed => spindle.0.at-speed
net spindle-vel-fb-rps => spindle.0.speed-in
net spindle-index-enable <=> spindle.0.index-enable
# ---Setup spindle at speed signals---
sets spindle-at-speed true
#******************************
# connect miscellaneous signals
#******************************
# ---HALUI signals---
net axis-select-x halui.axis.x.select
net jog-x-pos halui.axis.x.plus
net jog-x-neg halui.axis.x.minus
net jog-x-analog halui.axis.x.analog
net x-is-homed halui.joint.0.is-homed
net axis-select-y halui.axis.y.select
net jog-y-pos halui.axis.y.plus
net jog-y-neg halui.axis.y.minus
net jog-y-analog halui.axis.y.analog
net y-is-homed halui.joint.1.is-homed
net axis-select-z halui.axis.z.select
net jog-z-pos halui.axis.z.plus
net jog-z-neg halui.axis.z.minus
net jog-z-analog halui.axis.z.analog
net z-is-homed halui.joint.2.is-homed
net jog-selected-pos halui.axis.selected.plus
net jog-selected-neg halui.axis.selected.minus
net spindle-manual-cw halui.spindle.0.forward
net spindle-manual-ccw halui.spindle.0.reverse
net spindle-manual-stop halui.spindle.0.stop
net machine-is-on halui.machine.is-on
net jog-speed halui.axis.jog-speed
net MDI-mode halui.mode.is-mdi
# ---coolant signals---
net coolant-mist <= iocontrol.0.coolant-mist
net coolant-flood <= iocontrol.0.coolant-flood
# ---probe signal---
net probe-in => motion.probe-input
# ---motion control signals---
net in-position <= motion.in-position
net machine-is-enabled <= motion.motion-enabled
# ---digital in / out signals---
# ---estop signals---
net estop-out <= iocontrol.0.user-enable-out
net estop-out => iocontrol.0.emc-enable-in
# ---manual tool change signals---
net tool-change-request <= iocontrol.0.tool-change
net tool-change-confirmed => iocontrol.0.tool-changed
net tool-number <= iocontrol.0.tool-prep-number
# ---Use external manual tool change dialog---
loadusr -W hal_manualtoolchange
net tool-change-request => hal_manualtoolchange.change
net tool-change-confirmed <= hal_manualtoolchange.changed
net tool-number => hal_manualtoolchange.number
# ---ignore tool prepare requests---
net tool-prepare-loopback iocontrol.0.tool-prepare => iocontrol.0.tool-prepared
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17997
- Thank you received: 5284
07 Aug 2023 00:37 #277180
by PCW
Replied by PCW on topic 6040 7i76 Conversion
Is the output voltage 0 (or close to 0) when LinuxCNC is not running?
Please Log in or Create an account to join the conversation.
- spacestate1
- Offline
- Senior Member
-
Less
More
- Posts: 59
- Thank you received: 10
07 Aug 2023 00:40 #277181
by spacestate1
Replied by spacestate1 on topic 6040 7i76 Conversion
It is yes, but I can double check later. I might try just setting up a whole new config and see if I can get that working with a fresh start as well.
Please Log in or Create an account to join the conversation.
- spacestate1
- Offline
- Senior Member
-
Less
More
- Posts: 59
- Thank you received: 10
07 Aug 2023 21:44 #277285
by spacestate1
Replied by spacestate1 on topic 6040 7i76 Conversion
Actually it is not 0 it is 3.98v even when the spindle is not engaged in linuxcnc
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17997
- Thank you received: 5284
07 Aug 2023 22:14 #277286
by PCW
Replied by PCW on topic 6040 7i76 Conversion
That sounds like the analog TB4 pins are not connected properly
to the three VFD pins:
SPIN+ --> VFD 5VOUT
SPINOUT --> VFD 5VIN
SPIN- --> VFD GND
to the three VFD pins:
SPIN+ --> VFD 5VOUT
SPINOUT --> VFD 5VIN
SPIN- --> VFD GND
Please Log in or Create an account to join the conversation.
- spacestate1
- Offline
- Senior Member
-
Less
More
- Posts: 59
- Thank you received: 10
07 Aug 2023 23:14 #277289
by spacestate1
Replied by spacestate1 on topic 6040 7i76 Conversion
it looks like they are connected this way
5VOUT --> SPIN+
GND --> SPIN-
5VIN --> SPINOUT
just to be clear these are the right pins in the picture correct. currently getting zero volts on the + and - pins and ground
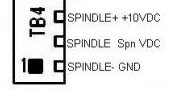
5VOUT --> SPIN+
GND --> SPIN-
5VIN --> SPINOUT
just to be clear these are the right pins in the picture correct. currently getting zero volts on the + and - pins and ground
Attachments:
Please Log in or Create an account to join the conversation.
- spacestate1
- Offline
- Senior Member
-
Less
More
- Posts: 59
- Thank you received: 10
07 Aug 2023 23:17 #277290
by spacestate1
Replied by spacestate1 on topic 6040 7i76 Conversion
well 5v on 5v out on the VFD
Please Log in or Create an account to join the conversation.
Time to create page: 0.158 seconds