6x6 Stewart (Parallel Kinematic Machine Tool)
- ommar
-
 Topic Author
Topic Author
- Offline
- Junior Member
-

- Posts: 31
- Thank you received: 0
egmak@debian:~$ sudo su
[sudo] password for egmak:
root@debian:/home/egmak# halrun
halcmd: loadrt genhexkins
halcmd: show param
Parameters:
Owner Type Dir Value Name
halcmd:
Parameters did not list. What must i do ?
Please Log in or Create an account to join the conversation.
- andypugh
-

- Away
- Moderator
-

- Posts: 19871
- Thank you received: 4640
I am confused about why there is no error, but no pins.
As I suggested, try "show all"
Please Log in or Create an account to join the conversation.
- jepler
-

- Offline
- Administrator
-

- Posts: 70
- Thank you received: 33
yes, "sudo" / "su" should be unnecessary to run linuxcnc or halrun. When building linuxcnc for yourself, the only step done with "sudo" is "sudo make setuid".
Please Log in or Create an account to join the conversation.
- ommar
-
Topic Author
- Offline
- Junior Member
-
- Posts: 31
- Thank you received: 0
I builded my hexapod. Nowadays i try to control one step motor. I connected the step motor driver and mesa 7i76 daughter card and 6i25 card. I used to pncconfig wizard but i did not move the step motor. Software giving an error like this;
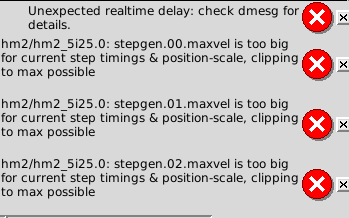
And this is the ini file;
# Generated by PNCconf at Sun May 1 15:21:22 2016
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
[EMC]
MACHINE = my_LinuxCNC_machine_deneme
DEBUG = 0
[DISPLAY]
DISPLAY = axis
POSITION_OFFSET = RELATIVE
POSITION_FEEDBACK = ACTUAL
MAX_FEED_OVERRIDE = 2.000000
MAX_SPINDLE_OVERRIDE = 1.000000
MIN_SPINDLE_OVERRIDE = 0.500000
INTRO_GRAPHIC = linuxcnc.gif
INTRO_TIME = 5
PROGRAM_PREFIX = /home/egmach/linuxcnc/nc_files
INCREMENTS = 5mm 1mm .5mm .1mm .05mm .01mm .005mm
POSITION_FEEDBACK = ACTUAL
DEFAULT_LINEAR_VELOCITY = 0.250000
MAX_LINEAR_VELOCITY = 1.000000
MIN_LINEAR_VELOCITY = 0.010000
DEFAULT_ANGULAR_VELOCITY = 0.250000
MAX_ANGULAR_VELOCITY = 1.000000
MIN_ANGULAR_VELOCITY = 0.010000
EDITOR = gedit
GEOMETRY = xyz
[FILTER]
PROGRAM_EXTENSION = .png,.gif,.jpg Greyscale Depth Image
PROGRAM_EXTENSION = .py Python Script
png = image-to-gcode
gif = image-to-gcode
jpg = image-to-gcode
py = python
[TASK]
TASK = milltask
CYCLE_TIME = 0.010
[RS274NGC]
PARAMETER_FILE = linuxcnc.var
[EMCMOT]
EMCMOT = motmod
COMM_TIMEOUT = 1.0
COMM_WAIT = 0.010
SERVO_PERIOD = 1000000
[HOSTMOT2]
# **** This is for info only ****
# DRIVER0=hm2_pci
# BOARD0=5i25
[HAL]
HALUI = halui
HALFILE = my_LinuxCNC_machine_deneme.hal
HALFILE = custom.hal
POSTGUI_HALFILE = postgui_call_list.hal
SHUTDOWN = shutdown.hal
[HALUI]
[TRAJ]
AXES = 3
COORDINATES = X Y Z
LINEAR_UNITS = mm
ANGULAR_UNITS = degree
CYCLE_TIME = 0.010
DEFAULT_VELOCITY = 2.50
MAX_LINEAR_VELOCITY = 25.00
[EMCIO]
EMCIO = io
CYCLE_TIME = 0.100
TOOL_TABLE = tool.tbl
#********************
# Axis X
#********************
[AXIS_0]
TYPE = LINEAR
HOME = 0.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 25.0
MAX_ACCELERATION = 750.0
# The values below should be 25% larger than MAX_VELOCITY and MAX_ACCELERATION
# If using BACKLASH compensation STEPGEN_MAXACCEL should be 100% larger.
STEPGEN_MAXVEL = 31.25
STEPGEN_MAXACCEL = 937.50
P = 50.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# these are in nanoseconds
DIRSETUP = 10000
DIRHOLD = 10000
STEPLEN = 10000
STEPSPACE = 10000
STEP_SCALE = 400000.0
MIN_LIMIT = -0.01
MAX_LIMIT = 2000000.0
HOME_OFFSET = 0.0
#********************
# Axis Y
#********************
[AXIS_1]
TYPE = LINEAR
HOME = 0.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 25.0
MAX_ACCELERATION = 750.0
# The values below should be 25% larger than MAX_VELOCITY and MAX_ACCELERATION
# If using BACKLASH compensation STEPGEN_MAXACCEL should be 100% larger.
STEPGEN_MAXVEL = 31.25
STEPGEN_MAXACCEL = 937.50
P = 50.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# these are in nanoseconds
DIRSETUP = 2000
DIRHOLD = 2000
STEPLEN = 2000
STEPSPACE = 2000
STEP_SCALE = 400000.0
MIN_LIMIT = -0.01
MAX_LIMIT = 2000000.0
HOME_OFFSET = 0.0
#********************
# Axis Z
#********************
[AXIS_2]
TYPE = LINEAR
HOME = 0.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 25.0
MAX_ACCELERATION = 750.0
# The values below should be 25% larger than MAX_VELOCITY and MAX_ACCELERATION
# If using BACKLASH compensation STEPGEN_MAXACCEL should be 100% larger.
STEPGEN_MAXVEL = 31.25
STEPGEN_MAXACCEL = 937.50
P = 50.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# these are in nanoseconds
DIRSETUP = 2000
DIRHOLD = 2000
STEPLEN = 2000
STEPSPACE = 2000
STEP_SCALE = 400000.0
MIN_LIMIT = -1000000.0
MAX_LIMIT = 0.01
HOME_OFFSET = 0.0
#********************
# Spindle
#********************
[SPINDLE_9]
P = 0
I = 0
D = 0
FF0 = 1
FF1 = 0
FF2 = 0
BIAS = 0
DEADBAND = 0
MAX_OUTPUT = 2000Can you help me ?
Thank you.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Away
- Moderator
-
- Posts: 19871
- Thank you received: 4640
Where did you get those numbers from?
400,000 steps per mm is unlikely to be correct.
Please Log in or Create an account to join the conversation.
- ommar
-
Topic Author
- Offline
- Junior Member
-
- Posts: 31
- Thank you received: 0
Please Log in or Create an account to join the conversation.
- andypugh
-
- Away
- Moderator
-
- Posts: 19871
- Thank you received: 4640
Pncconfig wizard give this number. Is this uncorrect ? or is this number source of error ?
I suspect that your input values to pncconf might be in error.
What do you get if you calculate steps-per-mm by hand?
Please Log in or Create an account to join the conversation.
- ommar
-
Topic Author
- Offline
- Junior Member
-
- Posts: 31
- Thank you received: 0
I editted the kinematics.hal (configs/sim/axis/vismach/hexapod-sim/hexapod) file for my machine coordinates. And i started linuxcnc but 3D model is not update for my joint coordinates. In addition i can not find genhexkins and trivkins files. Are these files stay in configs/sim/axis/vismach/hexapod-sim/hexapod directory ? Must i install these files ? I am confused. Can you help me ?
Please Log in or Create an account to join the conversation.
- andypugh
-
- Away
- Moderator
-
- Posts: 19871
- Thank you received: 4640
The kinematics files normally live in /usr/bin I think. If the congif starts then LinuxCNC is able to find the files.
which genhexkinsPlease Log in or Create an account to join the conversation.
- ommar
-
Topic Author
- Offline
- Junior Member
-
- Posts: 31
- Thank you received: 0
Did you edit the files in your ~/linuxcnc/configs directory or some others?
The kinematics files normally live in /usr/bin I think. If the congif starts then LinuxCNC is able to find the files.
which genhexkins
might help to find the files that are being used.
Yes i editted ~/linuxcnc/configs directory. The command is not working.
Please Log in or Create an account to join the conversation.