LinuxCNC S-Curve Accelerations
- cmorley
- Away
- Moderator
-

- Posts: 7336
- Thank you received: 2161
motion: wheeljogging *.jog-accel-fraction hal pins
new motion hal pins:
axis.L.jog-accel-fraction
joint.N.jog-accel-fraction
Hal pins specify reduced acceleration for wheel jogging to reduce
impulsive motion when jog count changes occur at low frequency.
The pins specify a fraction (between 0 and 1) of the corresponding
ini setting for [*]MAX_ACCELERATION. Values less than zero or
more than 1 are ignored.
When jog-counts are increased/decreased slowly, the use of full
acceleration can cause disconcerting motion or shaking on machines
with high acceleration capabilities. This feature may be used
with or without auxiliary lowpass filtering of the *.jog-counts
inputs.
Note: Lowpass filtering of jog-counts smooths motion when
jog-counts changes are sustained but is less effective for single
event or low frequency count changes because the leading/trailing
accel occurs at the ini setting for max_acceleration.
Please Log in or Create an account to join the conversation.
- cmorley
- Away
- Moderator
-
- Posts: 7336
- Thank you received: 2161
Please Log in or Create an account to join the conversation.
- arvidb
-

- Offline
- Platinum Member
-

- Posts: 459
- Thank you received: 158
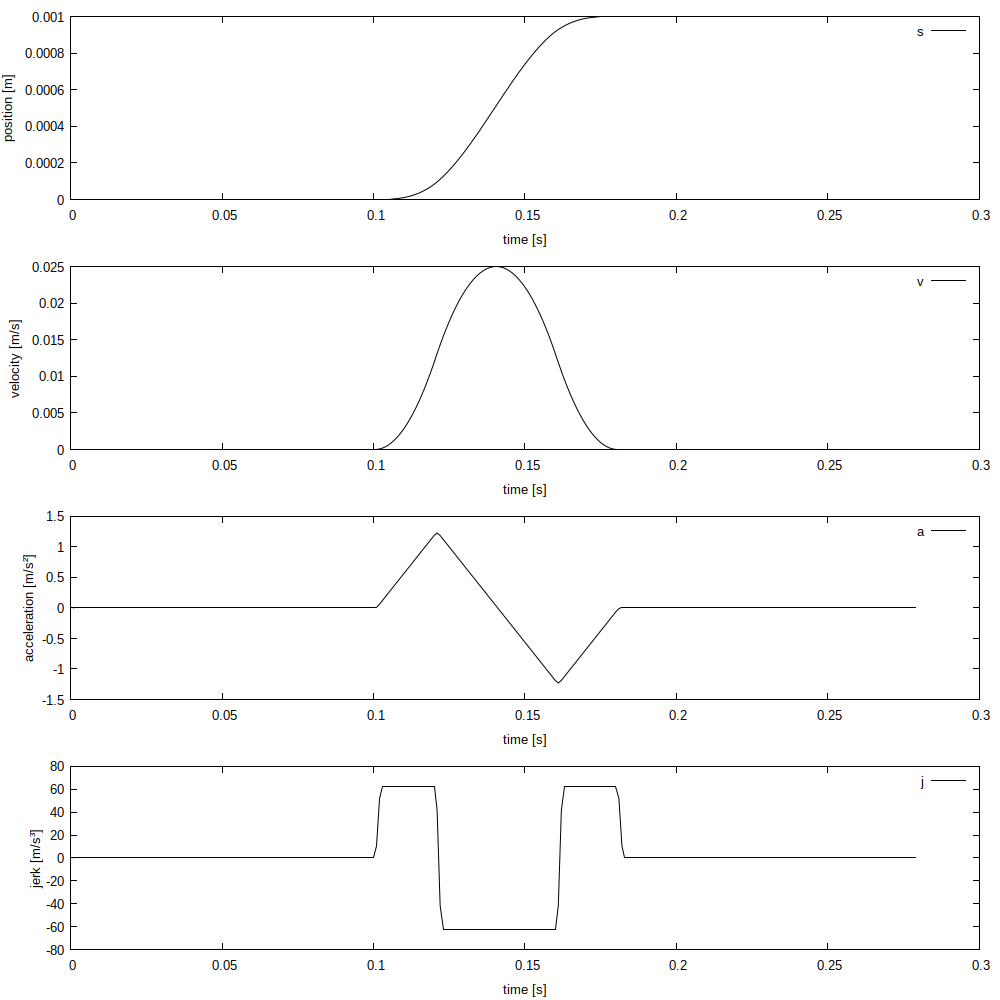
An even shorter move, 0.1 mm, would only reach about 0.5 m/s² with the same jerk setting.
Please Log in or Create an account to join the conversation.
- arvidb
-
- Offline
- Platinum Member
-
- Posts: 459
- Thank you received: 158
Please Log in or Create an account to join the conversation.
- cmorley
- Away
- Moderator
-
- Posts: 7336
- Thank you received: 2161
Please Log in or Create an account to join the conversation.
- rodw
-

- Offline
- Platinum Member
-
- Posts: 11990
- Thank you received: 4084
In addition to free mode and teleop mode simple_tp:s, there's another one declared in emcmot_axis_t: ext_offset_tp: "planner for external coordinate offsets". Any idea what that's used for?
If the code was reorganised that might be able to be folded into the jogging TP as at a high level, they are functionally equivalent. Both use a count to adjust position.
Please Log in or Create an account to join the conversation.
- arvidb
-
- Offline
- Platinum Member
-
- Posts: 459
- Thank you received: 158
Why not add the offset to the position command sent to the TP rather than using a separate TP and combining their output (which requires that they "split" the total v_max and a_max budget between them through the OFFSET_AV_RATIO setting)?
rodw: The external axis offsets seem to work on cartesian position rather than joint position. How are they functionally equivalent? Just trying to understand what they are used for.
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
- Posts: 11990
- Thank you received: 4084
Its used extensively for Torch Height Control in the Plasmac config (where the axis position is adjusted using arc voltage as a process control variable. There is a strong linear relationship between torch height and arc voltage.
There are a number of cool sims demonstrating how else External offsets can be used in v's 2.8 & 2.9 you might like to look at. Machining a cam lobe might be a practical example. Andy has a video demonstrating how this might work. Plasmac is also part of 2.8 & 2.9
Please Log in or Create an account to join the conversation.
- rmu
-

- Offline
- Elite Member
-

- Posts: 279
- Thank you received: 101
Dealing with jerk-limits per axis and going back and forth through kinematics will be very interesting.
Please Log in or Create an account to join the conversation.
- arvidb
-
- Offline
- Platinum Member
-
- Posts: 459
- Thank you received: 158
(Cute cat BTW.
") )
) Please Log in or Create an account to join the conversation.