LinuxCNC S-Curve Accelerations
- rmu
-

- Offline
- Elite Member
-

Less
More
- Posts: 279
- Thank you received: 101
08 Jul 2020 18:43 #174006
by rmu
Replied by rmu on topic LinuxCNC S-Curve Accelerations
just for reference: forum.linuxcnc.org/38-general-linuxcnc-q...oth-velocity-profile
I agree code could be organized better. Unfortunately, my approach leads to acceleration constraint violations (that should not be there and which I don't fully understand) and leads to some really strange behaviour.
I agree code could be organized better. Unfortunately, my approach leads to acceleration constraint violations (that should not be there and which I don't fully understand) and leads to some really strange behaviour.
Please Log in or Create an account to join the conversation.
- arvidb
-

- Offline
- Platinum Member
-

Less
More
- Posts: 459
- Thank you received: 158
08 Jul 2020 19:22 #174014
by arvidb
Replied by arvidb on topic LinuxCNC S-Curve Accelerations
You said it well in that thread:
It's an interesting challenge though. If there was just more energy available each day.")
Explicit constructions of an S-Curve with constant derivative of jerk followed by constant jerk, constant acceleration, constant velocity phases and at the end the other way back seems to be very messy and have a ton of cases and corners, especially if you want to continue a given velocity/acceleration/jerk.
It's an interesting challenge though. If there was just more energy available each day.
Please Log in or Create an account to join the conversation.
- grijalvap
-

- Offline
- Elite Member
-
Less
More
- Posts: 200
- Thank you received: 63
08 Aug 2020 20:13 #177708
by grijalvap
Replied by grijalvap on topic LinuxCNC S-Curve Accelerations
github.com/synthetos/TinyG/wiki/Jerk-Con...led-Motion-Explained
I'm curios about this project they have jerk controlled motion.
can we learn about it and implement in Linuxcnc?
I'm curios about this project they have jerk controlled motion.
can we learn about it and implement in Linuxcnc?
The following user(s) said Thank You: Aciera
Please Log in or Create an account to join the conversation.
- arvidb
-
- Offline
- Platinum Member
-
Less
More
- Posts: 459
- Thank you received: 158
17 Oct 2020 21:43 #186389
by arvidb
Replied by arvidb on topic LinuxCNC S-Curve Accelerations
Speaking of "cases and corners" in a jerk-limited jog planner, here's an interesting one:
t = 0.0 s: User presses right -> machine accelerates axis in positive direction (v_max reached at t = 0.30 s).
t = 0.35 s (first vertical line): User presses left instead -> machine accelerates axis in other direction to bring vel towards negative.
t = 0.58 s (second vertical line): User releases button -> machine stops axis.
At t = 0.58 s, vel is still > 0, but acc is maximally negative. There's not enough time to jerk acc to zero before vel has swung negative. So to stop the axis without violating the jerk limit, its velocity must swing negative before returning to zero; although the button was released while velocity was positive, you can see the position actually retarding a bit before the axis stops:
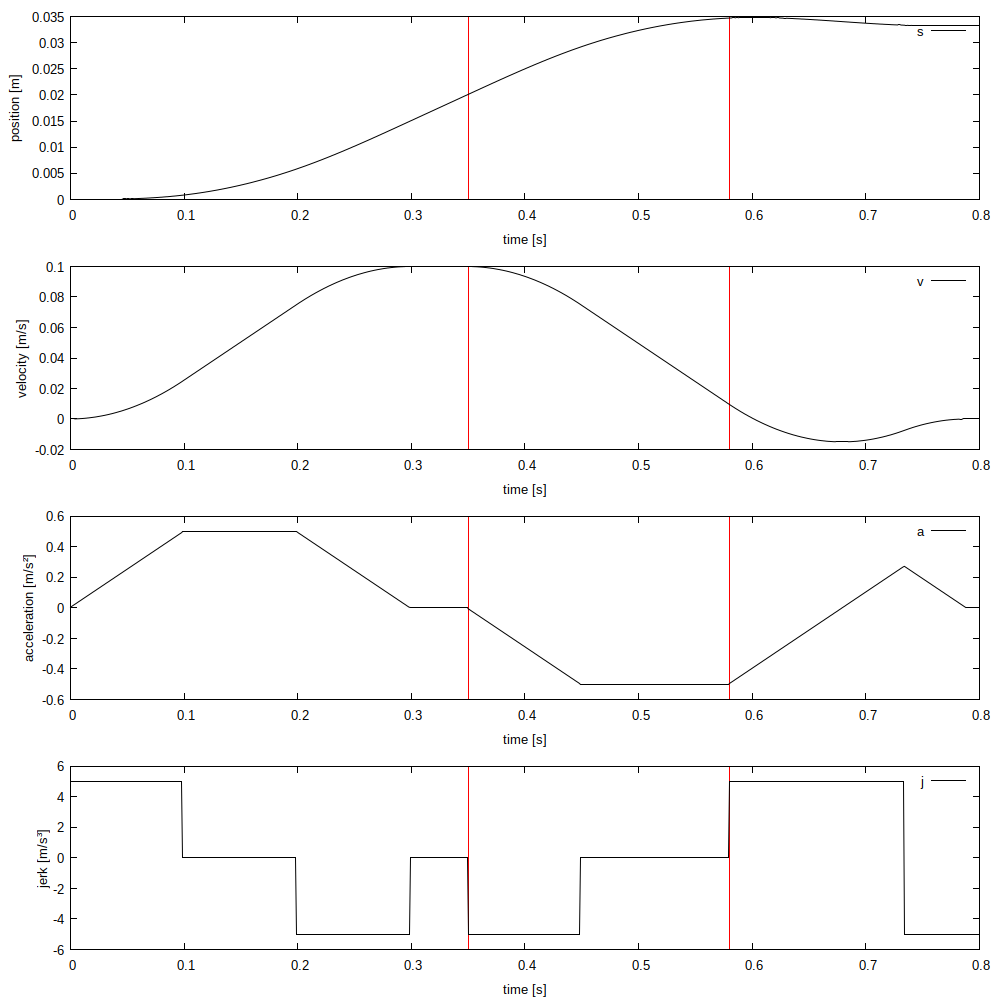
Fun stuff! O__o
t = 0.0 s: User presses right -> machine accelerates axis in positive direction (v_max reached at t = 0.30 s).
t = 0.35 s (first vertical line): User presses left instead -> machine accelerates axis in other direction to bring vel towards negative.
t = 0.58 s (second vertical line): User releases button -> machine stops axis.
At t = 0.58 s, vel is still > 0, but acc is maximally negative. There's not enough time to jerk acc to zero before vel has swung negative. So to stop the axis without violating the jerk limit, its velocity must swing negative before returning to zero; although the button was released while velocity was positive, you can see the position actually retarding a bit before the axis stops:
Fun stuff! O__o
Attachments:
The following user(s) said Thank You: Shu
Please Log in or Create an account to join the conversation.
- arvidb
-
- Offline
- Platinum Member
-
Less
More
- Posts: 459
- Thank you received: 158
18 Oct 2020 13:55 #186463
by arvidb
Replied by arvidb on topic LinuxCNC S-Curve Accelerations
I used a recursive algorithm and data structure to generate the plot above:
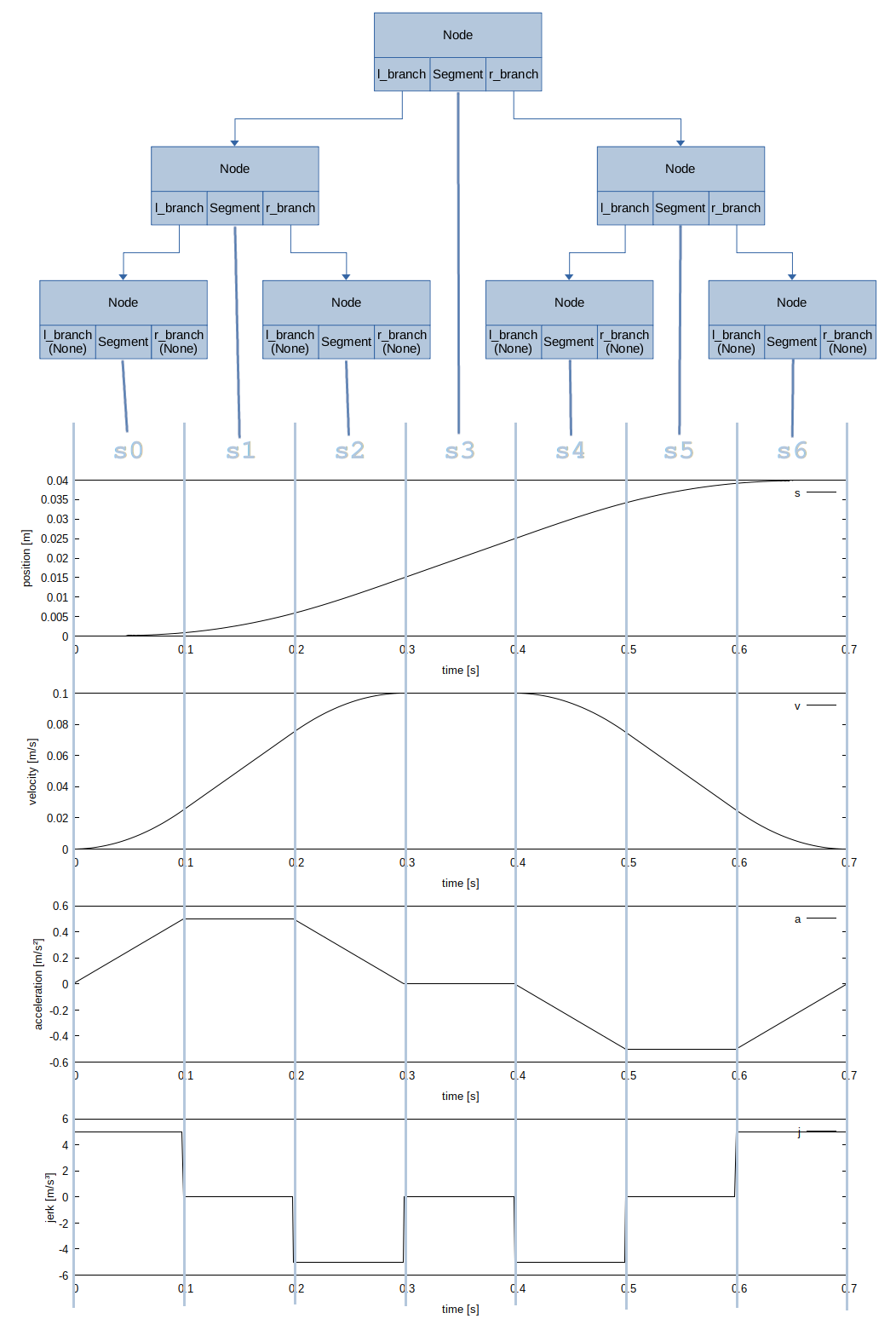
The "level" in the node diagram then corresponds to a certain polynomial degree: s3 is linear with respect to position, s1 & s5 are quadratic, and s0, s2, s4 & s6 are cubic in the example above.
The number of segments grows as a power of 2: 2^N-1 where N is the degree of the polynomial. So acceleration-limited motion is 2^2-1 = 3 segments, jerk-limited is 2^3-1 = 7 segments, snap -limited is 2^4-1 = 15 segments, and so on.
Just for kicks, here's a pop-limited (6th-degree, 63-segment) move generated by the exact same code, just fed with a longer limit vector (jerk = 5 m/s³, snap = 100 m/s⁴, crackle = 4000 m/s⁵, pop = 320000 m/s⁶):
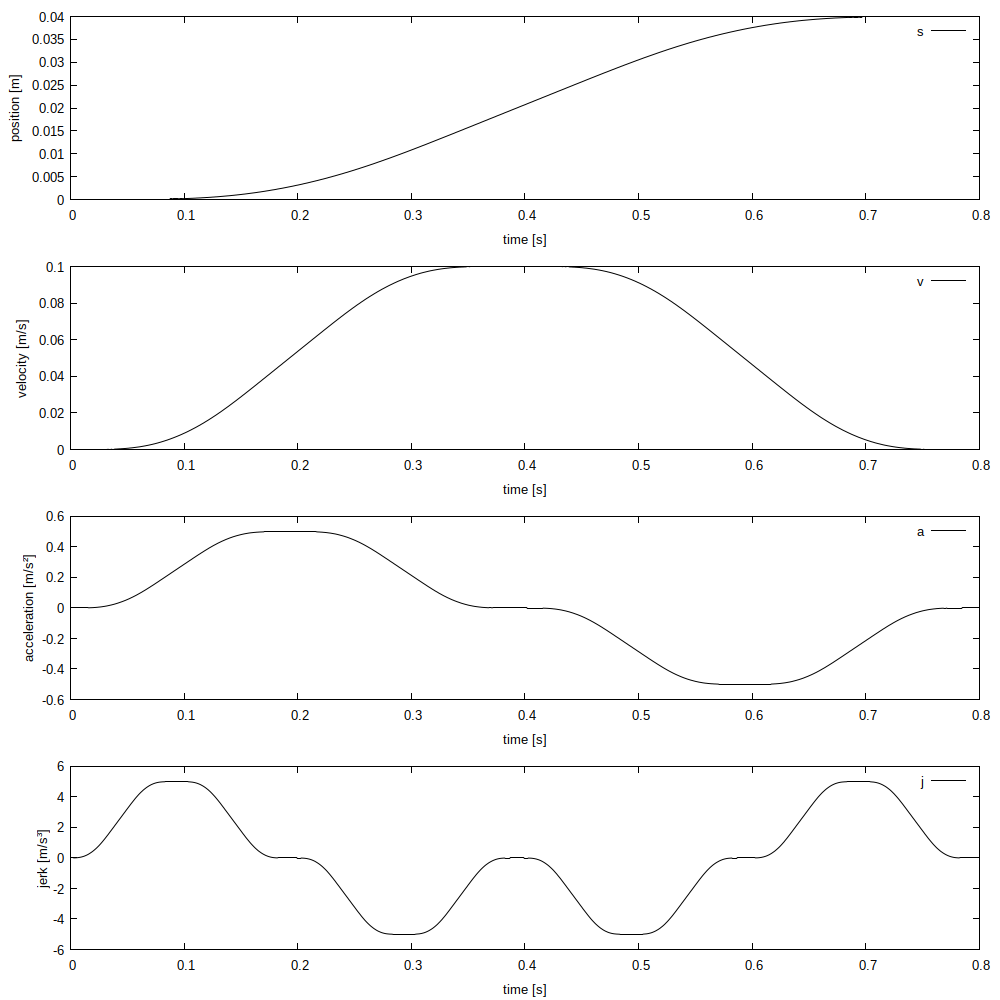
")
Now this only works because the move starts with no initial motion, and the length of the move is carefully selected, as is the ratio between the limits, so don't get your hopes up too high for a generic pop-limited jog planner!
Now that I think about it though, auto-selection of any limits above acceleration (like jerk) might not be a bad idea? Not many users will want to dig into the maths and physics to learn how to choose sane limits... They/we just want nice motion, right?
The "level" in the node diagram then corresponds to a certain polynomial degree: s3 is linear with respect to position, s1 & s5 are quadratic, and s0, s2, s4 & s6 are cubic in the example above.
The number of segments grows as a power of 2: 2^N-1 where N is the degree of the polynomial. So acceleration-limited motion is 2^2-1 = 3 segments, jerk-limited is 2^3-1 = 7 segments, snap -limited is 2^4-1 = 15 segments, and so on.
Just for kicks, here's a pop-limited (6th-degree, 63-segment) move generated by the exact same code, just fed with a longer limit vector (jerk = 5 m/s³, snap = 100 m/s⁴, crackle = 4000 m/s⁵, pop = 320000 m/s⁶):
Now this only works because the move starts with no initial motion, and the length of the move is carefully selected, as is the ratio between the limits, so don't get your hopes up too high for a generic pop-limited jog planner!
Now that I think about it though, auto-selection of any limits above acceleration (like jerk) might not be a bad idea? Not many users will want to dig into the maths and physics to learn how to choose sane limits... They/we just want nice motion, right?
Attachments:
The following user(s) said Thank You: Todd Zuercher, tommylight, Shu, Nico2017
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4717
- Thank you received: 2112
18 Oct 2020 14:15 #186465
by Aciera
RIGHT!
Replied by Aciera on topic LinuxCNC S-Curve Accelerations
They/we just want nice motion, right?
RIGHT!
Please Log in or Create an account to join the conversation.
- arvidb
-
- Offline
- Platinum Member
-
Less
More
- Posts: 459
- Thank you received: 158
18 Oct 2020 14:22 #186466
by arvidb

Replied by arvidb on topic LinuxCNC S-Curve Accelerations
LOLRIGHT!
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Away
- Platinum Member
-
Less
More
- Posts: 4745
- Thank you received: 1454
20 Oct 2020 18:54 #186725
by Todd Zuercher
Replied by Todd Zuercher on topic LinuxCNC S-Curve Accelerations
So how many chickens do we have to sacrifice to get it?
Please Log in or Create an account to join the conversation.
- arvidb
-
- Offline
- Platinum Member
-
Less
More
- Posts: 459
- Thank you received: 158
20 Oct 2020 19:59 #186737
by arvidb
Replied by arvidb on topic LinuxCNC S-Curve Accelerations
I'm happy to say sacrificing chickens is not an effective solution here. 
I have a dozen or so tests that I run on my current code, and at the moment five still fails. And when those are fixed, I'm sure I can think of more "corner cases" that I need to test. So the code really doesn't work yet - also it's full of debug printouts, old misleading comments, and not least "panic!()"'s and "unimplemented!()"'s. I want to concentrate on development rather than publishing it and get a lot of questions about things I will change later anyway.
I do think the data structure and the idea of using a recursive algorithm were worth sharing though (in case I never do finish it, or as documentation if I do).
Then when I'm satisfied the code works I have to integrate it into LinuxCNC (now it just spits out a lot of numbers that I feed into gnuplot), which includes convincing you guys that Rust should be allowed into the codebase. Coding-wise I have a pretty good idea on what integration entails though; my code has pretty much the same interface as simple_tp and Rust interfaces nicely with C.
You could say I'm "90 % there", which IME usually means half the work remains.
I have a dozen or so tests that I run on my current code, and at the moment five still fails. And when those are fixed, I'm sure I can think of more "corner cases" that I need to test. So the code really doesn't work yet - also it's full of debug printouts, old misleading comments, and not least "panic!()"'s and "unimplemented!()"'s. I want to concentrate on development rather than publishing it and get a lot of questions about things I will change later anyway.
I do think the data structure and the idea of using a recursive algorithm were worth sharing though (in case I never do finish it, or as documentation if I do).
Then when I'm satisfied the code works I have to integrate it into LinuxCNC (now it just spits out a lot of numbers that I feed into gnuplot), which includes convincing you guys that Rust should be allowed into the codebase.
Coding-wise I have a pretty good idea on what integration entails though; my code has pretty much the same interface as simple_tp and Rust interfaces nicely with C.You could say I'm "90 % there", which IME usually means half the work remains.
Please Log in or Create an account to join the conversation.
- the_wildgoose
- Offline
- New Member
-

Less
More
- Posts: 4
- Thank you received: 0
24 Oct 2020 11:29 #187096
by the_wildgoose
Replied by the_wildgoose on topic LinuxCNC S-Curve Accelerations
Hi, I'm not sure how to solve your problem, but I can say that this problem *feels* like it wants an FFT in it...
I used to play a lot with audio and when first starting out I was tempted to think in the time domain and write interpolators and crazy stuff like that, which usually then spew harmonics, etc. However, they feel like the right solution intuitively. The real answer is to think in frequency space and then this stuff just drops out.
I suspect that this problem will lend itself similarly? Consider reading a little on audio resampling in frequency space and then see if this provides some insight into this problem?
I used to play a lot with audio and when first starting out I was tempted to think in the time domain and write interpolators and crazy stuff like that, which usually then spew harmonics, etc. However, they feel like the right solution intuitively. The real answer is to think in frequency space and then this stuff just drops out.
I suspect that this problem will lend itself similarly? Consider reading a little on audio resampling in frequency space and then see if this provides some insight into this problem?
Please Log in or Create an account to join the conversation.
Time to create page: 1.123 seconds