Mitsubishi RV-6SDL Robot arm Servo/Encoder usability
- Aciera
-
 Topic Author
Topic Author
- Offline
- Administrator
-

Less
More
- Posts: 4741
- Thank you received: 2125
01 Jan 2020 10:44 - 01 Jan 2020 10:49 #153705
by Aciera
Mitsubishi RV-6SDL Robot arm Servo/Encoder usability was created by Aciera
Hi All
I've got a Mitsubishi RV-6SDL 6-axis Robot arm with a broken controller. I know the arm is functional, but a repair of the controller is not realistic because of missing documentation (service manual).


So now the question is, can it be controlled with linuxCNC?
I think there is a kinematic already built into LinuxCNC for such robot arms with 6 rotary joints. The 3-phase AC Servo motors should not be a problem, neither should the brake. However I am uncertain about the absoulte encoders fitted on the motors.
I managed to read the numbers of two servo motors: Joint 1 HF-SWS93B-S1 3-phase 900W 3000r/min and Joint 5 HC-KFS13BL-S16
I guess these are all MELSERVO motors. Although I have not been able to find documentation on the HF-SWS motor. But given that some of these motors have hollow shafts to feed the cabling through this might be some variant that is not available separately.


I presume its a Mitsubishi serial Absolute Encoder output (17-bit / 131072pulses/revolution resolution). But I am not certain.

The connector is an AMP D-2100 series 2 x 4 pole (Just wouldn't focus properly)

I believe it is this interface but the connector is different.
Can anybody provide further clarification on the possibility to get this robot running with LinuxCNC
Thanks and a very happy new year.
I've got a Mitsubishi RV-6SDL 6-axis Robot arm with a broken controller. I know the arm is functional, but a repair of the controller is not realistic because of missing documentation (service manual).
So now the question is, can it be controlled with linuxCNC?
I think there is a kinematic already built into LinuxCNC for such robot arms with 6 rotary joints. The 3-phase AC Servo motors should not be a problem, neither should the brake. However I am uncertain about the absoulte encoders fitted on the motors.
I managed to read the numbers of two servo motors: Joint 1 HF-SWS93B-S1 3-phase 900W 3000r/min and Joint 5 HC-KFS13BL-S16
I guess these are all MELSERVO motors. Although I have not been able to find documentation on the HF-SWS motor. But given that some of these motors have hollow shafts to feed the cabling through this might be some variant that is not available separately.
I presume its a Mitsubishi serial Absolute Encoder output (17-bit / 131072pulses/revolution resolution). But I am not certain.
The connector is an AMP D-2100 series 2 x 4 pole (Just wouldn't focus properly)
I believe it is this interface but the connector is different.
Can anybody provide further clarification on the possibility to get this robot running with LinuxCNC
Thanks and a very happy new year.
Last edit: 01 Jan 2020 10:49 by Aciera. Reason: Typos
Please Log in or Create an account to join the conversation.
- dm17ry
-

- Offline
- Elite Member
-

Less
More
- Posts: 206
- Thank you received: 89
01 Jan 2020 14:02 #153711
by dm17ry
Replied by dm17ry on topic Mitsubishi RV-6SDL Robot arm Servo/Encoder usability
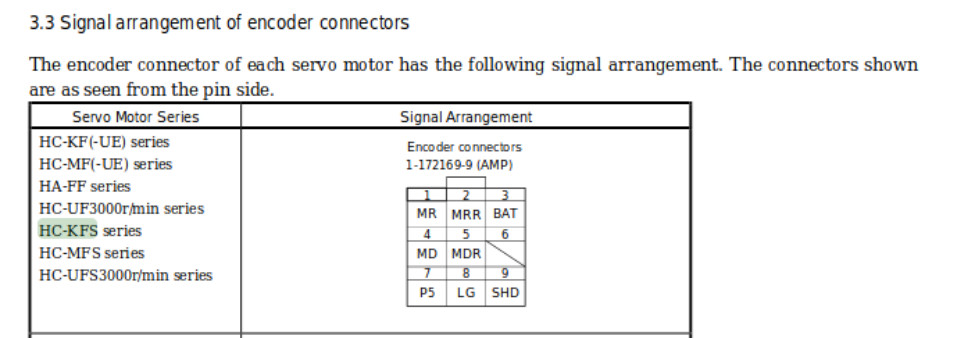
HC-KFS13 motors can be driven by MR-J2S, MR-J3 or MR-J4 mitsubishi servo amps. attached is the OBA17 encoder internal connector pinout.
but the HF-SWS is a problem. afaik, it is not present in any standard drive firmware. though it is possible to get it spinning by a standard drive specifying electrical/mechanical motor constants in drive parameters - it is totally undocumented and i don't know how to correctly derive many of those constants. so probably motor performance will not be great.
but the HF-SWS is a problem. afaik, it is not present in any standard drive firmware. though it is possible to get it spinning by a standard drive specifying electrical/mechanical motor constants in drive parameters - it is totally undocumented and i don't know how to correctly derive many of those constants. so probably motor performance will not be great.
Please Log in or Create an account to join the conversation.
- Aciera
-
Topic Author
- Offline
- Administrator
-
Less
More
- Posts: 4741
- Thank you received: 2125
02 Jan 2020 08:40 #153776
by Aciera
Replied by Aciera on topic Mitsubishi RV-6SDL Robot arm Servo/Encoder usability
Thanks. That confirms some of my guesses. I'm not really after high performance it would be a hobby project and as such the costs also have to be reasonable. I had hoped to find an open source solution to get it moving like the stmbl servo drive but I have not been able to confirm that it can work with this serial encoder protocol.
Does anybody know of a non Mitsubishi servo drive that can interface with these Mitsubishi serial encoders?
Does anybody know of a non Mitsubishi servo drive that can interface with these Mitsubishi serial encoders?
Please Log in or Create an account to join the conversation.
- dm17ry
-
- Offline
- Elite Member
-
Less
More
- Posts: 206
- Thank you received: 89
02 Jan 2020 08:52 #153777
by dm17ry
Replied by dm17ry on topic Mitsubishi RV-6SDL Robot arm Servo/Encoder usability
i don't have any experience with the stmbl, but i believe it does support OBA17 mitsubishi serial encoders.
Please Log in or Create an account to join the conversation.
- Aciera
-
Topic Author
- Offline
- Administrator
-
Less
More
- Posts: 4741
- Thank you received: 2125
02 Jan 2020 09:28 #153779
by Aciera
Replied by Aciera on topic Mitsubishi RV-6SDL Robot arm Servo/Encoder usability
I found this on the stmbl GitHub Page:
Quote:
"Mitsubishi servos such HA-FF usually have OBA17-051 or OBA17-052 encoders.
stmbl has support the "mit 02-4" and "mit 02-2" protocols"
EndQuote
Together with your information it seems quite possible that I could be able to control this robot with LinuxCNC. So I guess it might be worth while to hang on to this thing a bit longer and try a stmbl drive.
Quote:
"Mitsubishi servos such HA-FF usually have OBA17-051 or OBA17-052 encoders.
stmbl has support the "mit 02-4" and "mit 02-2" protocols"
EndQuote
Together with your information it seems quite possible that I could be able to control this robot with LinuxCNC. So I guess it might be worth while to hang on to this thing a bit longer and try a stmbl drive.
Please Log in or Create an account to join the conversation.
- Aciera
-
Topic Author
- Offline
- Administrator
-
Less
More
- Posts: 4741
- Thank you received: 2125
02 Jan 2020 09:48 #153780
by Aciera
Replied by Aciera on topic Mitsubishi RV-6SDL Robot arm Servo/Encoder usability
So this is something else I found on the stmbl page:

For Mitsubishi encoders it lists connections 1, 2, VCC, GND.
I wonder how this translates to my encoders.
Then again it might actually use one of the serial interfaces:
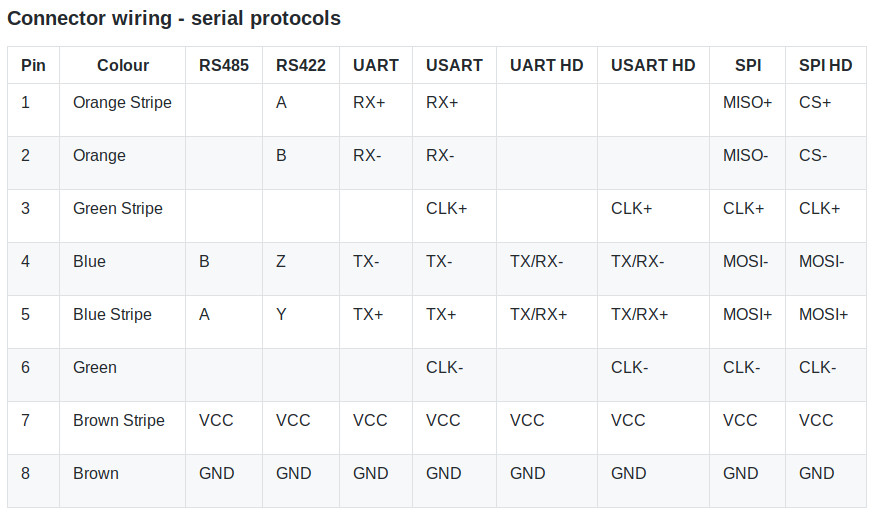
Does anybody know how these Mitsubishi serial encoders interface with the stmbl servo drive?
For Mitsubishi encoders it lists connections 1, 2, VCC, GND.
I wonder how this translates to my encoders.
Then again it might actually use one of the serial interfaces:
Does anybody know how these Mitsubishi serial encoders interface with the stmbl servo drive?
Attachments:
Please Log in or Create an account to join the conversation.
- dm17ry
-
- Offline
- Elite Member
-
Less
More
- Posts: 206
- Thank you received: 89
02 Jan 2020 10:13 #153781
by dm17ry
Replied by dm17ry on topic Mitsubishi RV-6SDL Robot arm Servo/Encoder usability
pin 4 - MRR
pin 5 - MR
pin 7 - P5
pin 8 - LG
pin 5 - MR
pin 7 - P5
pin 8 - LG
Please Log in or Create an account to join the conversation.
- Aciera
-
Topic Author
- Offline
- Administrator
-
Less
More
- Posts: 4741
- Thank you received: 2125
02 Jan 2020 10:24 #153783
by Aciera
Replied by Aciera on topic Mitsubishi RV-6SDL Robot arm Servo/Encoder usability
Awesome! Thanks!
So, now I'll see about getting my hands on a stmbl drive.
Greetings
So, now I'll see about getting my hands on a stmbl drive.
Greetings
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19875
- Thank you received: 4642
07 Jan 2020 22:54 #154276
by andypugh
That's the hard part, as one of the ICs that the drive depends on (the big expensive one) is no longer available.
There is an STMBL chat forum here, where you might find some advice.
gitter.im/rene-dev/stmbl
Replied by andypugh on topic Mitsubishi RV-6SDL Robot arm Servo/Encoder usability
Awesome! Thanks!
So, now I'll see about getting my hands on a stmbl drive.
That's the hard part, as one of the ICs that the drive depends on (the big expensive one) is no longer available.
There is an STMBL chat forum here, where you might find some advice.
gitter.im/rene-dev/stmbl
Please Log in or Create an account to join the conversation.
- Aciera
-
Topic Author
- Offline
- Administrator
-
Less
More
- Posts: 4741
- Thank you received: 2125
08 Jan 2020 08:45 #154290
by Aciera
Replied by Aciera on topic Mitsubishi RV-6SDL Robot arm Servo/Encoder usability
I know,, I have already posted a question on that chat, but no information has come forth there. As great as the stmbl drive looks, I find it very difficult to get specific information as the developers seem to have the drives they needed and life moves on.
It looks very impressive and is apparently able to interface with my 4-wire RS422 Mitsubishi serial encoders but apparently the master firmware supports only the 2-wire Mitsubishi encoder interface and I have not found out if I could get the 4-wire version anywhere.
And then of course there needs to be a new layout for a new IGBT which could be done next month or next year or never.
So I'm looking for alternatives.
It looks very impressive and is apparently able to interface with my 4-wire RS422 Mitsubishi serial encoders but apparently the master firmware supports only the 2-wire Mitsubishi encoder interface and I have not found out if I could get the 4-wire version anywhere.
And then of course there needs to be a new layout for a new IGBT which could be done next month or next year or never.
So I'm looking for alternatives.
Please Log in or Create an account to join the conversation.
Time to create page: 0.363 seconds