- LinuxCNC
- General LinuxCNC Questions
- How would you design a real time application for cnc control in c / c++ ???
How would you design a real time application for cnc control in c / c++ ???
- Grotius
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 2419
- Thank you received: 2348
27 Nov 2020 14:05 - 27 Nov 2020 14:06 #190440
by Grotius
Replied by Grotius on topic How would you design a real time application for cnc control in c / c++ ???
Hi Arciera,
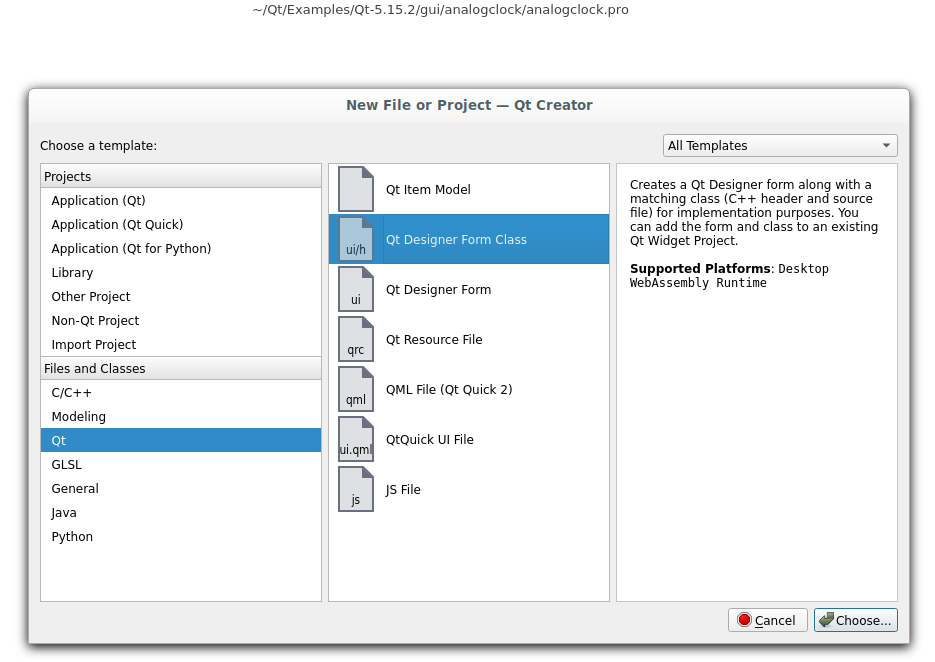
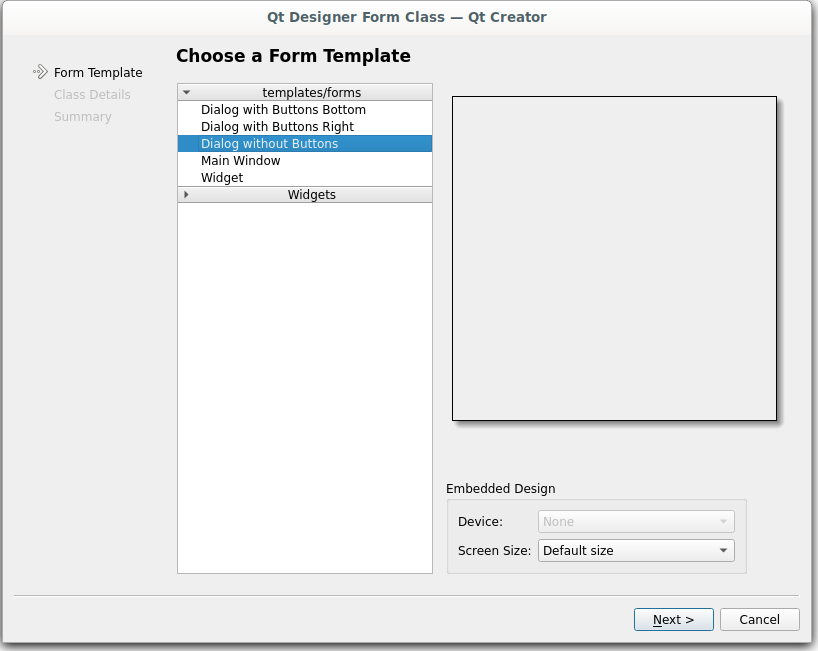
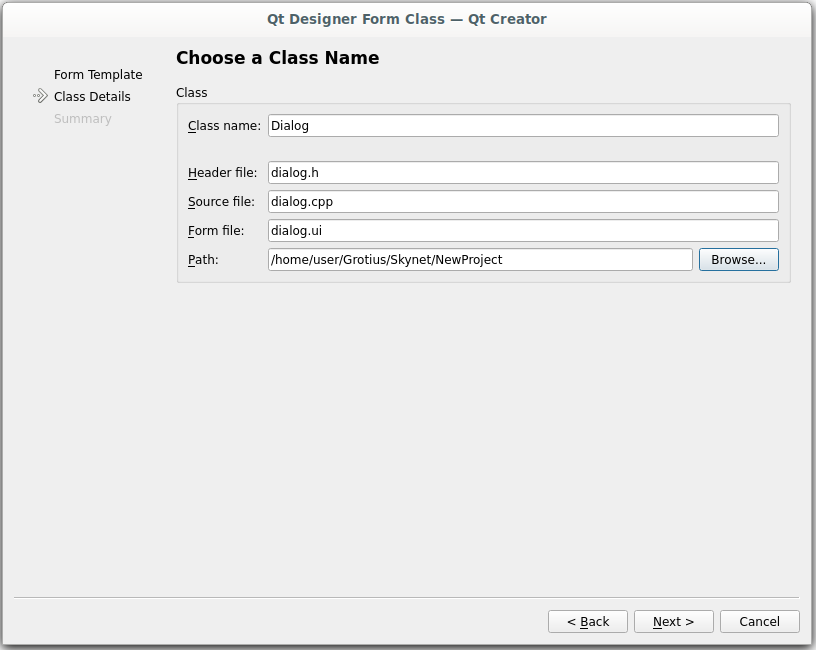
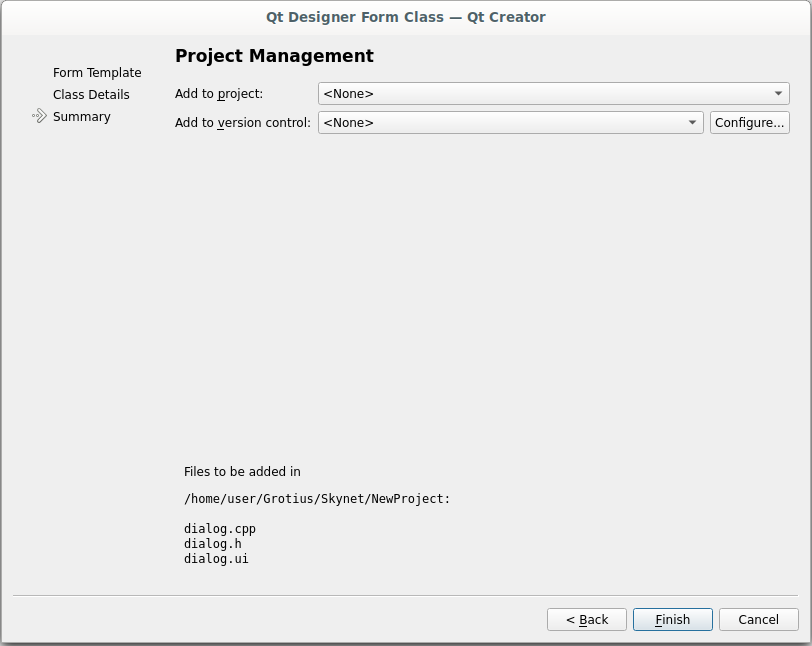
If you do a new project. like this :
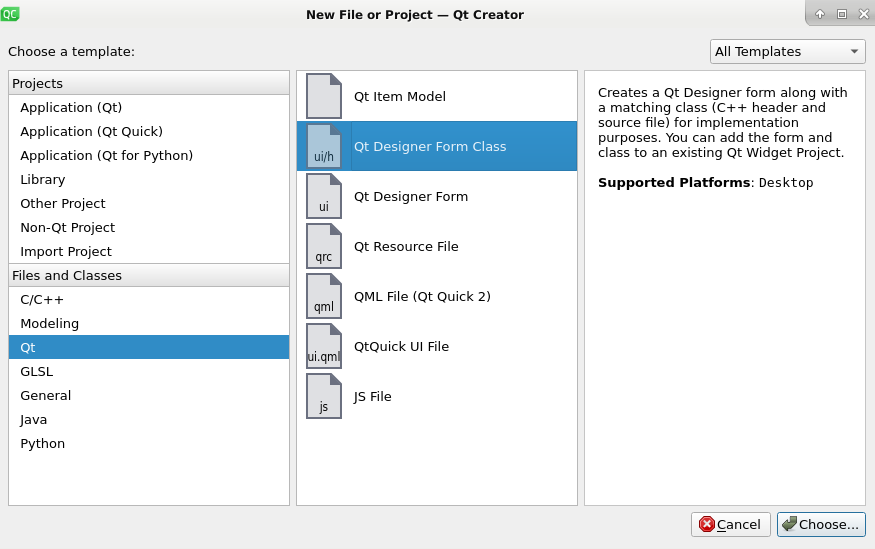
This should compile right away. If not.
sudo apt-get install gcc (this is the gcc compiler)
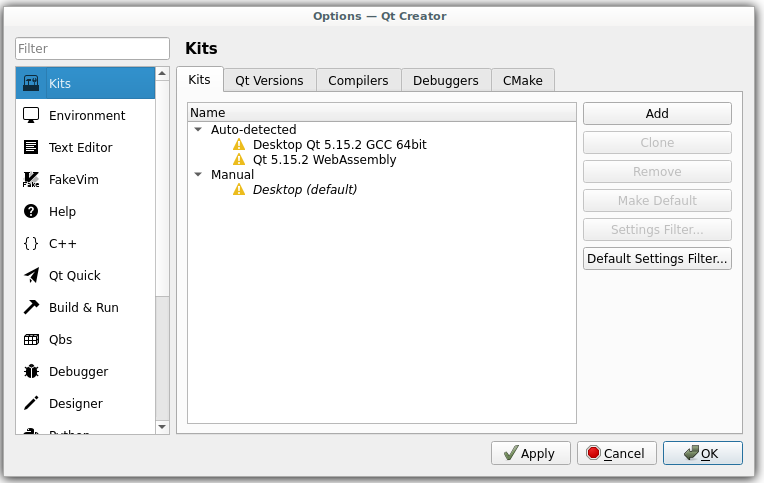
In help->about. Wich QT version does it show?
If you do a new project. like this :
This should compile right away. If not.
sudo apt-get install gcc (this is the gcc compiler)
In help->about. Wich QT version does it show?
Attachments:
Last edit: 27 Nov 2020 14:06 by Grotius.
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4755
- Thank you received: 2135
27 Nov 2020 14:41 #190447
by Aciera
Replied by Aciera on topic How would you design a real time application for cnc control in c / c++ ???
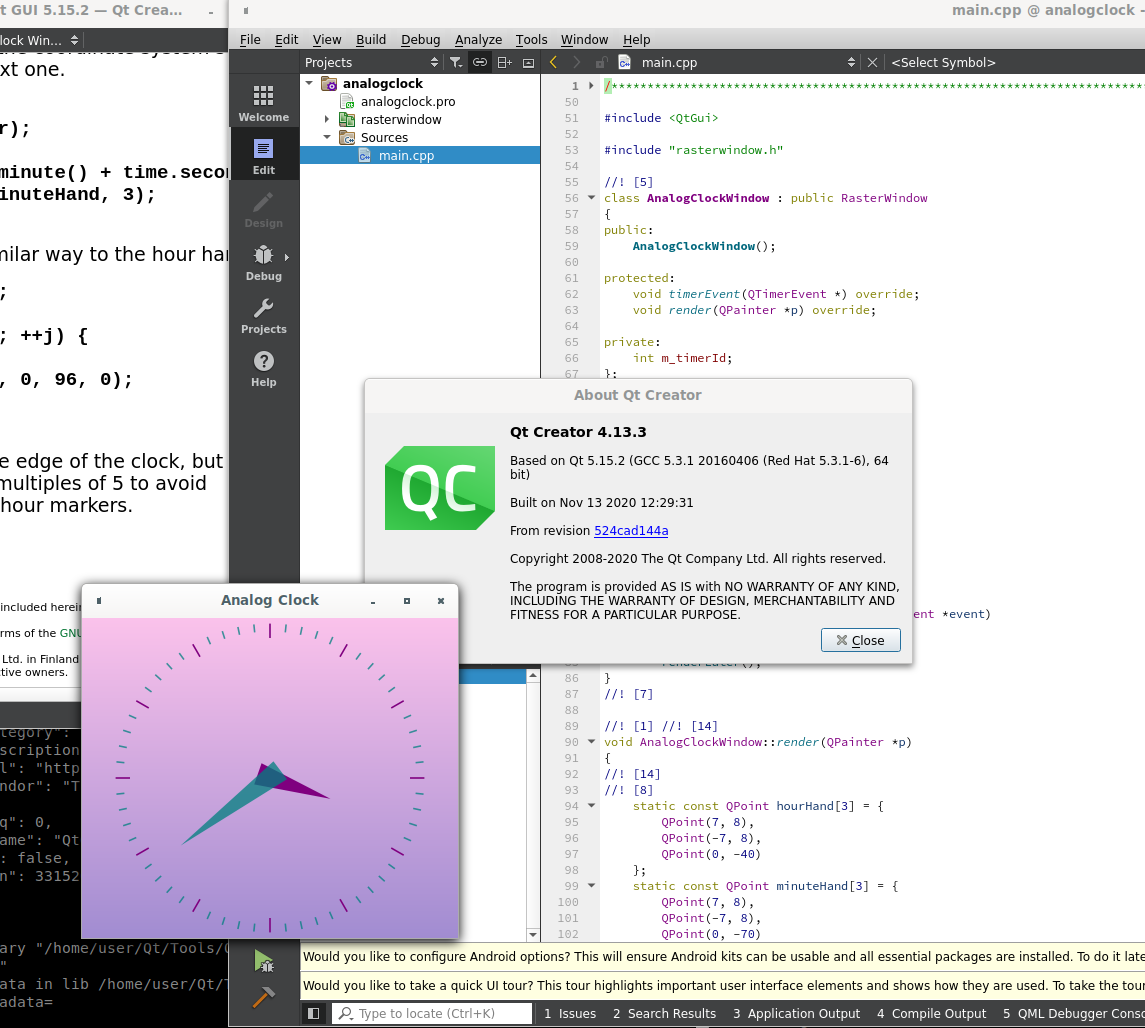
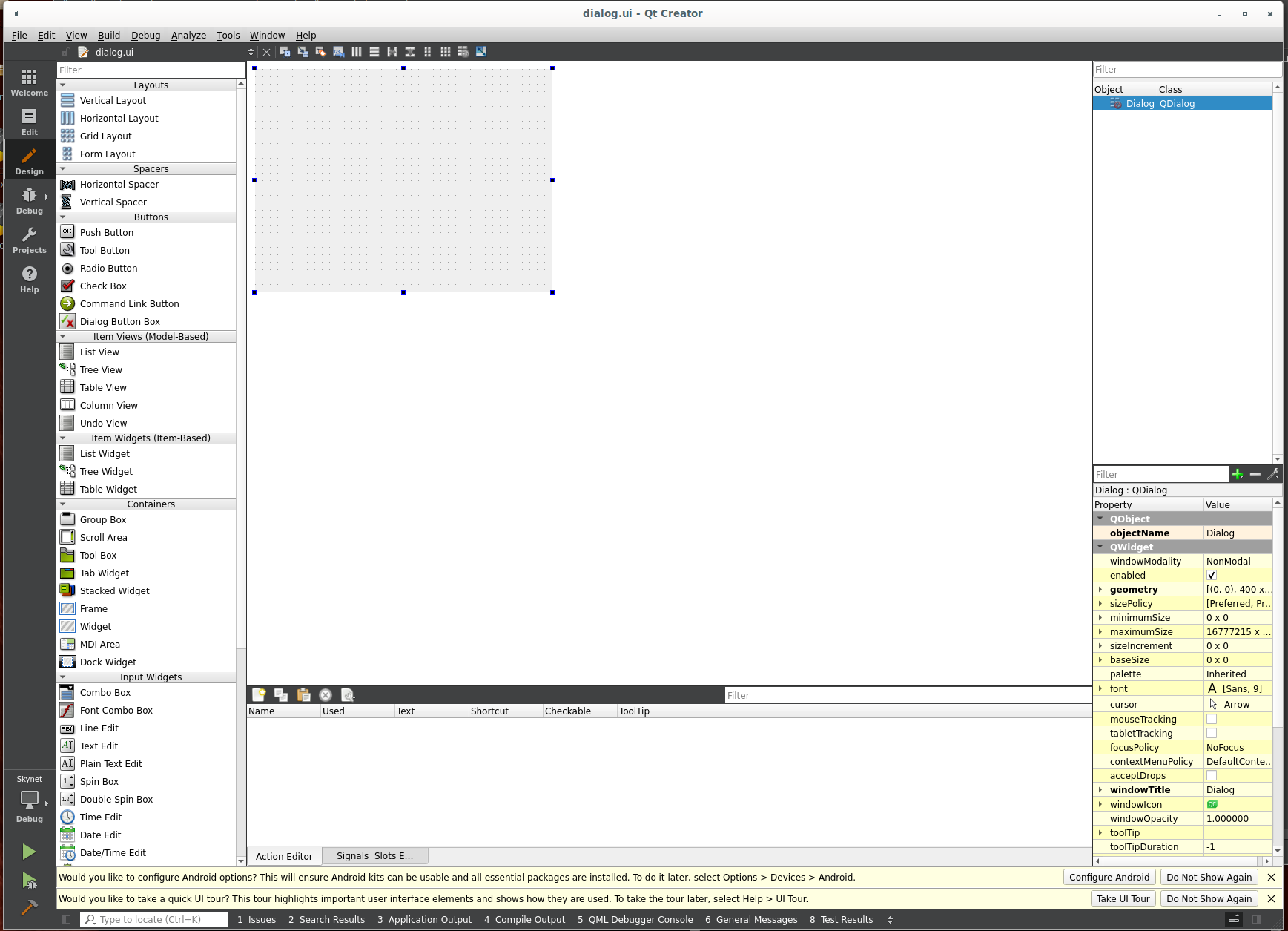
Tried creating a new project but I just ended up in qt designer "Build" was grayed out. So I compiled an example "Analog Clock" which built without a problem:
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4755
- Thank you received: 2135
27 Nov 2020 14:47 #190448
by Aciera
Replied by Aciera on topic How would you design a real time application for cnc control in c / c++ ???
More info:
Attachments:
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
27 Nov 2020 16:26 - 27 Nov 2020 16:29 #190459
by Grotius
Replied by Grotius on topic How would you design a real time application for cnc control in c / c++ ???
Hi Arciera,
I think it's the compiler. extra info
Your message say's the file is missing. If you follow the link, is the file missing?
$ sudo apt install build-essential
(build essentials are normally also installed with a lcnc rip, to get the ability to compile from source).
And then check this :
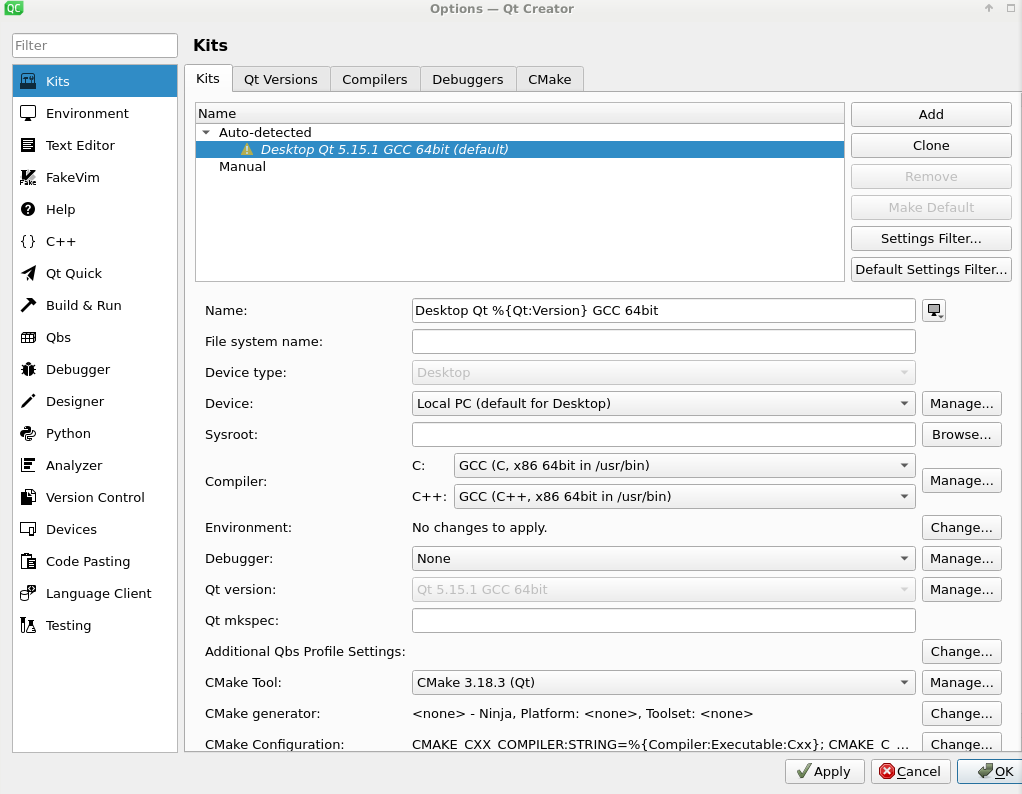
Important is, first start a new project (mainwindow project, no clock example) and try to compile this. If this is oke. Then open the Skynet app.
I think it's the compiler. extra info
Your message say's the file is missing. If you follow the link, is the file missing?
$ sudo apt install build-essential
(build essentials are normally also installed with a lcnc rip, to get the ability to compile from source).
And then check this :
Important is, first start a new project (mainwindow project, no clock example) and try to compile this. If this is oke. Then open the Skynet app.
Attachments:
Last edit: 27 Nov 2020 16:29 by Grotius.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4755
- Thank you received: 2135
27 Nov 2020 16:54 - 27 Nov 2020 16:59 #190461
by Aciera

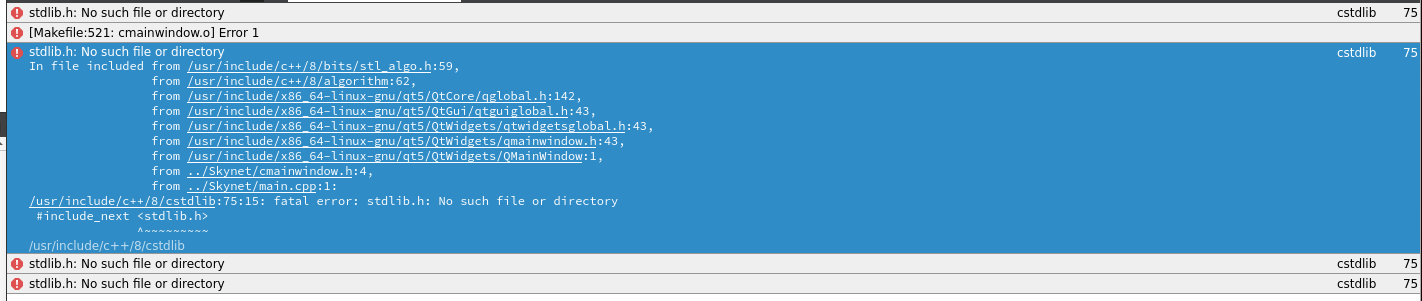
I have this:
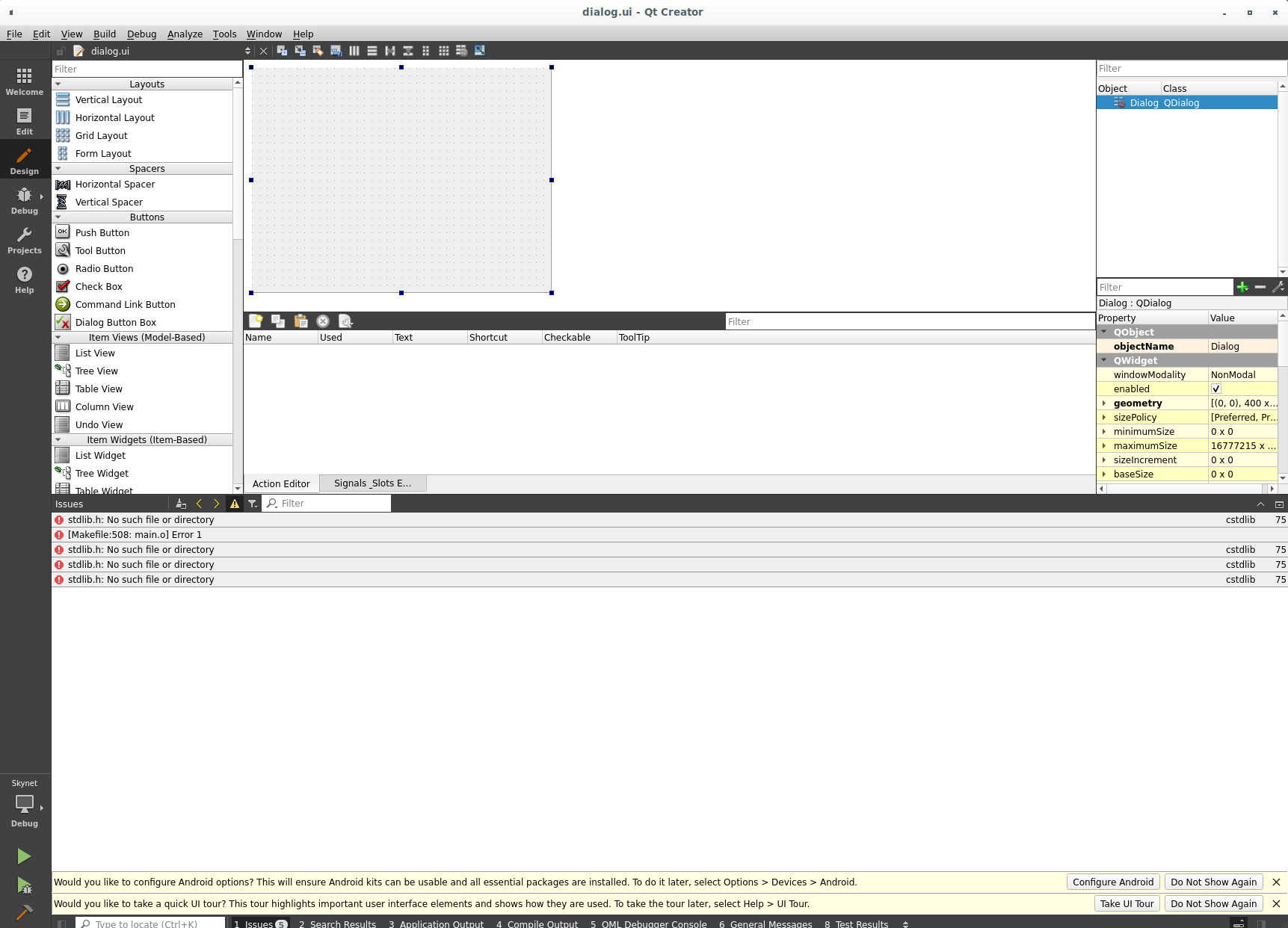
There are lots of Hits on the net about this and most say something along the line "I solved it by removing INCLUDEPATH += /usr/include from .pro file". But sadly I'm out of my depth here.
eu.startpage.com/do/dsearch?query=qt+cre...ch+file+or+directory
Replied by Aciera on topic How would you design a real time application for cnc control in c / c++ ???
No, it's actually there:Your message say's the file is missing. If you follow the link, is the file missing?
user@linuxcnc:~$ sudo apt install build-essential
[sudo] password for user:
Reading package lists... Done
Building dependency tree
Reading state information... Done
build-essential is already the newest version (12.6).
0 upgraded, 0 newly installed, 0 to remove and 3 not upgraded.I have this:
There are lots of Hits on the net about this and most say something along the line "I solved it by removing INCLUDEPATH += /usr/include from .pro file". But sadly I'm out of my depth here.
eu.startpage.com/do/dsearch?query=qt+cre...ch+file+or+directory
Attachments:
Last edit: 27 Nov 2020 16:59 by Aciera. Reason: Corrected last Screenshot to show compile errors
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
27 Nov 2020 17:15 #190462
by Grotius
Replied by Grotius on topic How would you design a real time application for cnc control in c / c++ ???
Maybe try : $ sudo apt-get install g++
If you don't succeed, no problem. Then will make a stepwise install guide for you !
If you don't succeed, no problem. Then will make a stepwise install guide for you !
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4755
- Thank you received: 2135
28 Nov 2020 07:48 #190492
by Aciera
Replied by Aciera on topic How would you design a real time application for cnc control in c / c++ ???
No, that's not it either.
user@linuxcnc:~$ sudo apt-get install g++
[sudo] password for user:
Reading package lists... Done
Building dependency tree
Reading state information... Done
g++ is already the newest version (4:8.3.0-1).
g++ set to manually installed.
0 upgraded, 0 newly installed, 0 to remove and 3 not upgraded.Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
29 Nov 2020 13:09 - 29 Nov 2020 13:27 #190602
by Grotius
Replied by Grotius on topic How would you design a real time application for cnc control in c / c++ ???
Hi,
A little update.
Now the gcode is applied to the selected workframe. Multiple workframe's are allowed. Every workframe may contain a different gcode.
The program is now reflecting the (robot tool angles) euler angles to the active workframe.
In the attached video you can see that during the program, the robot can still be moved on the track, and the robot tool angles can be changed.
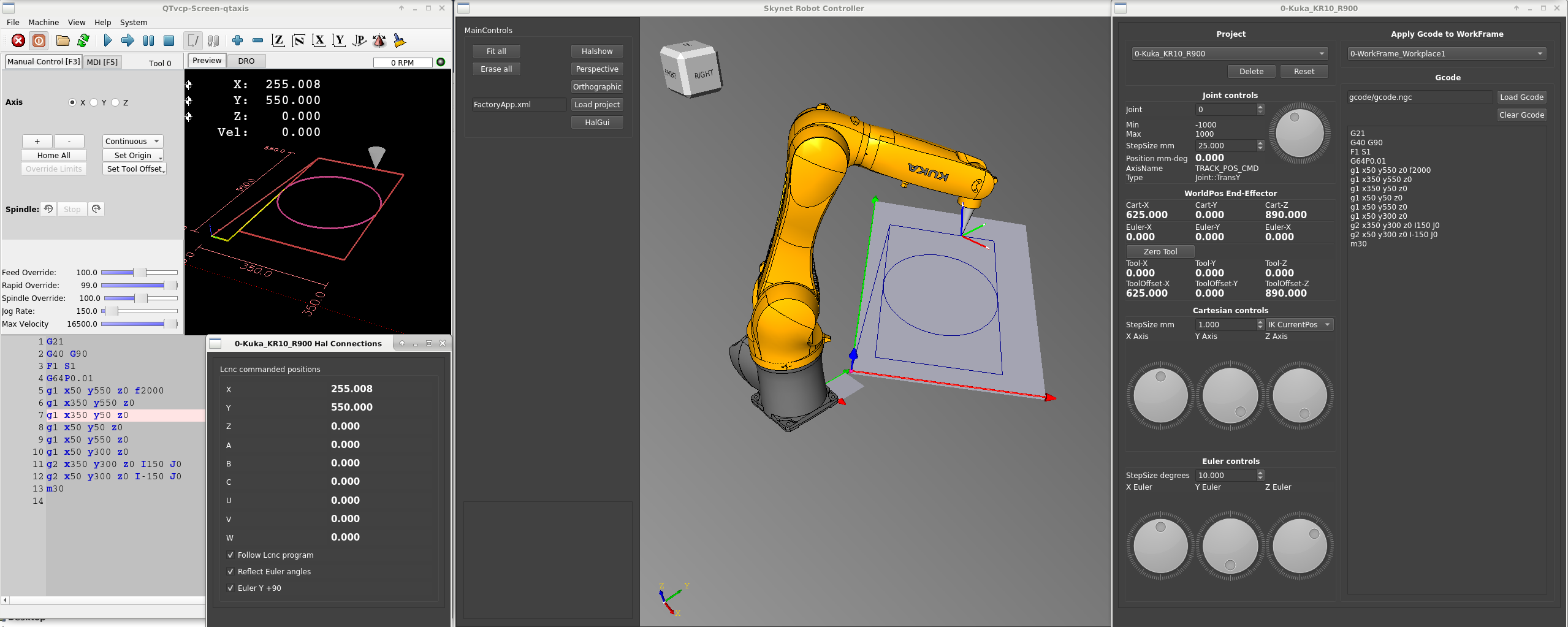
The video is a little bit fragmented because of the screencast recording + lcnc + skynet app together.
video
@Arciera,
No, that's not it either.
Hmm, I will try to make a skynet iso with qt working, but this will take some time.
A little update.
Now the gcode is applied to the selected workframe. Multiple workframe's are allowed. Every workframe may contain a different gcode.
The program is now reflecting the (robot tool angles) euler angles to the active workframe.
In the attached video you can see that during the program, the robot can still be moved on the track, and the robot tool angles can be changed.
The video is a little bit fragmented because of the screencast recording + lcnc + skynet app together.
video
@Arciera,
No, that's not it either.
Hmm, I will try to make a skynet iso with qt working, but this will take some time.
Attachments:
Last edit: 29 Nov 2020 13:27 by Grotius.
The following user(s) said Thank You: tommylight, Mud, Aciera
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4755
- Thank you received: 2135
29 Nov 2020 14:45 #190608
by Aciera
Replied by Aciera on topic How would you design a real time application for cnc control in c / c++ ???
Looks good very impressive.
Seems like there were a few times when the kinematic crossed a singular point though (when the arm suddenly changes postures).
The other thing that is still not clear to me is the capability to change between Joint, cartesian world and cartestian tool coordinate mode in the same gcode.
If we only use cartesian modes the arm cannot reach all of its potential work space because the kinematic model will produce infinite solutions when the arm approaches certain postures (ie two joints becoming colinear). To move between such "subspaces" requires the use of joint mode where the inverse kinematic is not used and then we need to be able to switch back to coordinated moves where the kinematic calculates the joints position through the inverse kinematic. What would a gcode program look like if I wanted to use all those different modes and change from one to the other?
Seems like there were a few times when the kinematic crossed a singular point though (when the arm suddenly changes postures).
The other thing that is still not clear to me is the capability to change between Joint, cartesian world and cartestian tool coordinate mode in the same gcode.
If we only use cartesian modes the arm cannot reach all of its potential work space because the kinematic model will produce infinite solutions when the arm approaches certain postures (ie two joints becoming colinear). To move between such "subspaces" requires the use of joint mode where the inverse kinematic is not used and then we need to be able to switch back to coordinated moves where the kinematic calculates the joints position through the inverse kinematic. What would a gcode program look like if I wanted to use all those different modes and change from one to the other?
The following user(s) said Thank You: Grotius
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
30 Nov 2020 12:40 - 30 Nov 2020 13:28 #190668
by Grotius
Replied by Grotius on topic How would you design a real time application for cnc control in c / c++ ???
Hi Arciera,
For Qt you can download this :
qt_creator_without_bug
I tried it on a fresh grotius iso and it seems to work. I had to install cmake first.
Installing Qt from the online installer is indeed a nightmare at the moment. I hope they solve this soon.
My iso failed because Lcnc pgp key's where not found. I will exclude Lcnc from my iso and try to install it trough script just
like ethercat.
@ update :
I had the same error as you had => stdlib not found. Howto get rid of this message is at the github pre-release page.
My conclusion so far is. From a fresh grotius iso you can run and compile a new project.
If you load the Skynet app, you get the error stdlib not found. Then you have to do a workaround.
For Qt you can download this :
qt_creator_without_bug
I tried it on a fresh grotius iso and it seems to work. I had to install cmake first.
Installing Qt from the online installer is indeed a nightmare at the moment. I hope they solve this soon.
My iso failed because Lcnc pgp key's where not found. I will exclude Lcnc from my iso and try to install it trough script just
like ethercat.
@ update :
I had the same error as you had => stdlib not found. Howto get rid of this message is at the github pre-release page.
My conclusion so far is. From a fresh grotius iso you can run and compile a new project.
If you load the Skynet app, you get the error stdlib not found. Then you have to do a workaround.
Last edit: 30 Nov 2020 13:28 by Grotius.
The following user(s) said Thank You: Aciera
Please Log in or Create an account to join the conversation.
- LinuxCNC
- General LinuxCNC Questions
- How would you design a real time application for cnc control in c / c++ ???
Time to create page: 0.441 seconds