Trajectory Planner using Ruckig Lib
- Joco
-

- Offline
- Platinum Member
-

Less
More
- Posts: 532
- Thank you received: 327
25 Nov 2023 19:52 #286491
by Joco
Replied by Joco on topic Trajectory Planner using Ruckig Lib
Interesting you have ended up with a runner for each dof. Since the UI update i had been looking into the single ruckig in relation to multiple axis and considering a real world example (my plasma table) and how it could deal with the different limitations that exist.
I had come to the conclusion that a single ruckig instance could not adequately cope with the realities of, in this example, my machine. I need to have different jerk and acceleration values honoured by axis. This due to the differences in motor strengths on Z, different construction strengths between X and Y and thus different points where excessive flex and harmonics appear.
Intuitively I think having the multiple ruckig runners is where we need to be.
I will, when get time after rebuilding my table, dig into the recent approach. It could well be leveraging the existing TP with ruckig runners informing/adjusting the accelerations and velocities might be the way.
great work.
cheers - J.
I had come to the conclusion that a single ruckig instance could not adequately cope with the realities of, in this example, my machine. I need to have different jerk and acceleration values honoured by axis. This due to the differences in motor strengths on Z, different construction strengths between X and Y and thus different points where excessive flex and harmonics appear.
Intuitively I think having the multiple ruckig runners is where we need to be.
I will, when get time after rebuilding my table, dig into the recent approach. It could well be leveraging the existing TP with ruckig runners informing/adjusting the accelerations and velocities might be the way.
great work.
cheers - J.
The following user(s) said Thank You: Grotius
Please Log in or Create an account to join the conversation.
- Grotius
-

- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
27 Nov 2023 09:08 #286610
by Grotius
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
Hi Joco,
Good luck with your machine.
Indeed the xyz ruckig back-end runners ensure at least a valid motor output with no velocity jumps.
I still believe in our own trajectory planner, I think we have to add blending to it first.
Then we could use the G64 P0.01.
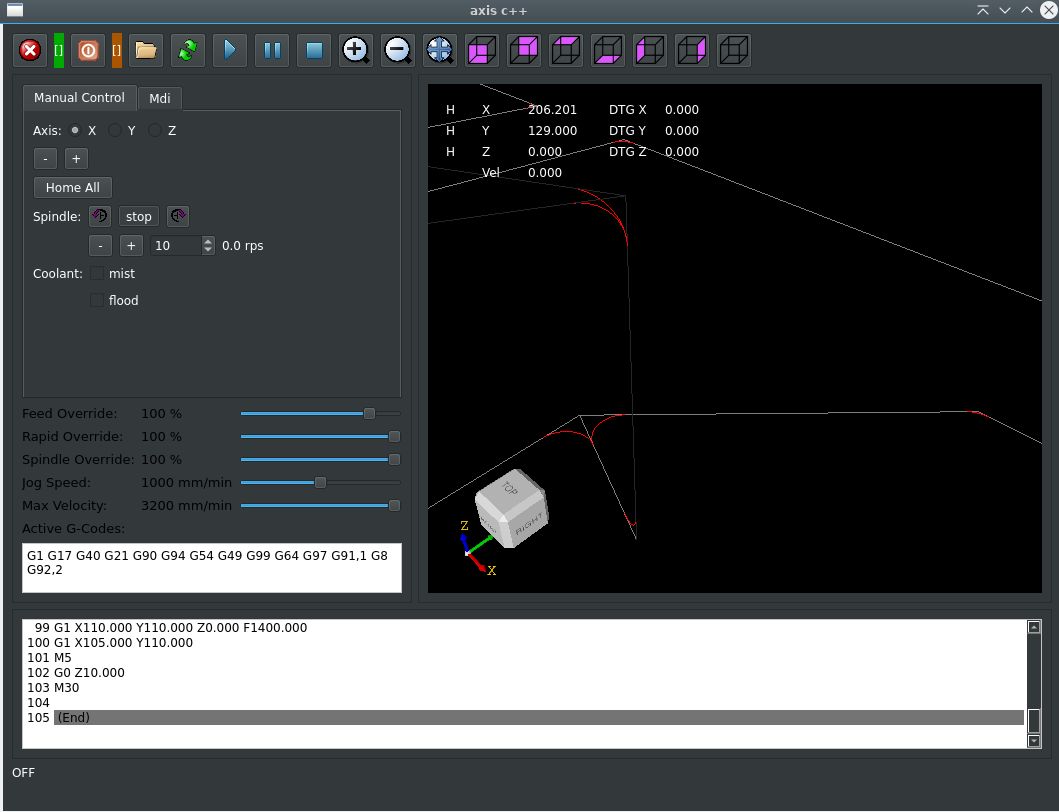
So i started writing a blending function, 3d blending wich works now for line-line blending. Arc-line blending still todo.
Good luck with your machine.
Indeed the xyz ruckig back-end runners ensure at least a valid motor output with no velocity jumps.
I still believe in our own trajectory planner, I think we have to add blending to it first.
Then we could use the G64 P0.01.
So i started writing a blending function, 3d blending wich works now for line-line blending. Arc-line blending still todo.
Attachments:
The following user(s) said Thank You: akb1212, tommylight, rodw, Unlogic
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
27 Nov 2023 20:07 #286635
by Grotius
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
Hi,
I added fillets for arc's and line's. But still work todo. It's not easy.
One problem is when you have a arc and a line in different planes. I don't know how to create a 3d fillet then.
So far the fillets look amazing.

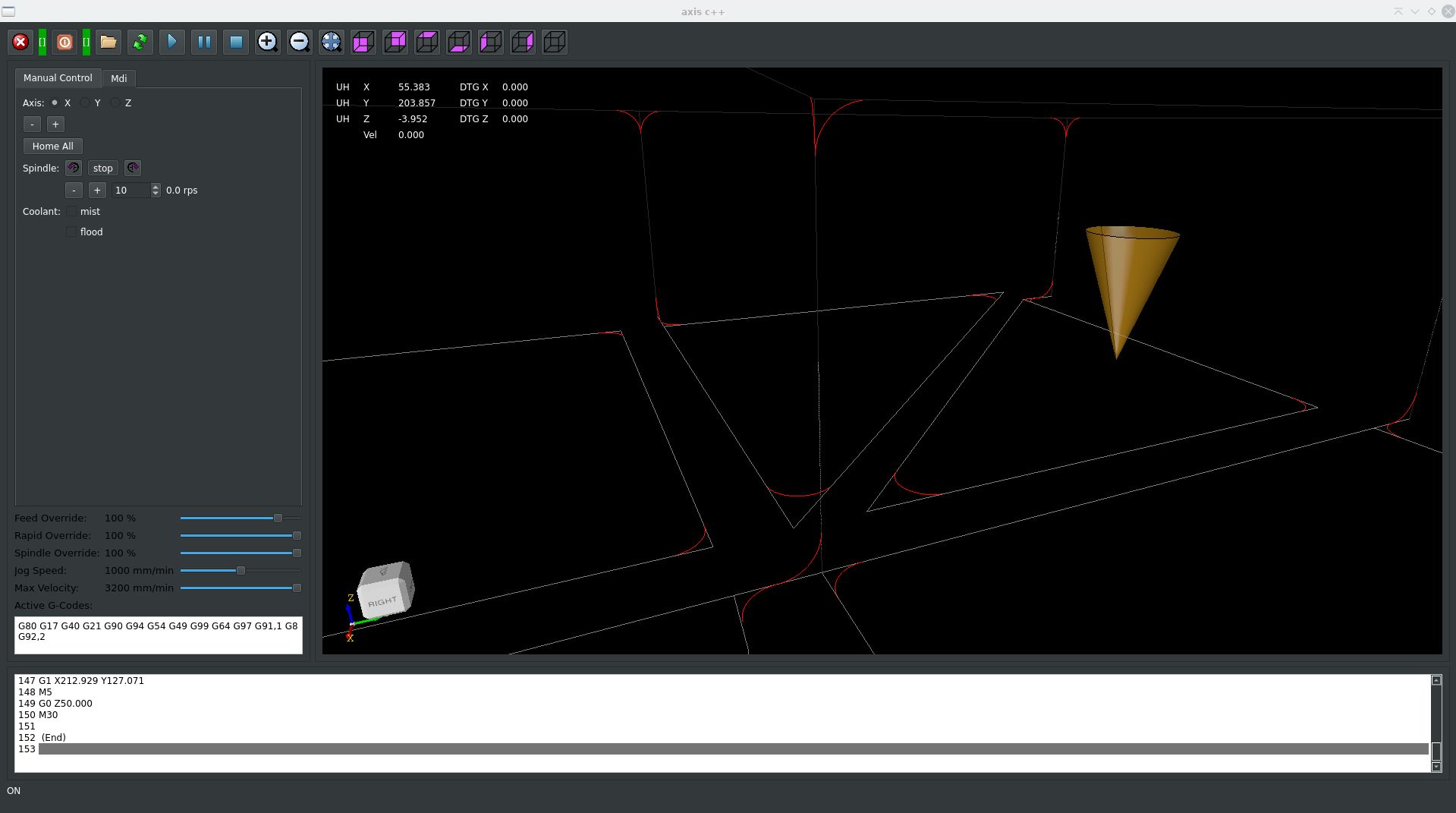
I added fillets for arc's and line's. But still work todo. It's not easy.
One problem is when you have a arc and a line in different planes. I don't know how to create a 3d fillet then.
So far the fillets look amazing.
Attachments:
The following user(s) said Thank You: akb1212, tommylight, tivoi, smc.collins, Alexandrion, Mecanix
Please Log in or Create an account to join the conversation.
- ihavenofish
- Offline
- Platinum Member
-
Less
More
- Posts: 1013
- Thank you received: 285
28 Nov 2023 01:18 #286648
by ihavenofish
Replied by ihavenofish on topic Trajectory Planner using Ruckig Lib
How does a fillet work when like segments are 0.001" long?
Some programs like fusion already have fillets built in to path generation, but they go bonkers on micro segments.
Some programs like fusion already have fillets built in to path generation, but they go bonkers on micro segments.
Please Log in or Create an account to join the conversation.
- aleksamc
-

- Offline
- Platinum Member
-
Less
More
- Posts: 568
- Thank you received: 67
28 Nov 2023 12:01 #286697
by aleksamc
Replied by aleksamc on topic Trajectory Planner using Ruckig Lib
May I ask one small question in your topic?
I had one problem with A axis (or any other, that not belong to XYZ).
I generated G-codes in ArtCam (it generates a lot of small pieces with length of movement 0.1mm). When I did such code for A-axis (rotary) I received very slow movement. Solution of that was to rename A to X, as example.
Does your trajectory planner could solve this problem?
I had one problem with A axis (or any other, that not belong to XYZ).
I generated G-codes in ArtCam (it generates a lot of small pieces with length of movement 0.1mm). When I did such code for A-axis (rotary) I received very slow movement. Solution of that was to rename A to X, as example.
Does your trajectory planner could solve this problem?
Please Log in or Create an account to join the conversation.
- TheRoslyak
-

- Offline
- Elite Member
-

Less
More
- Posts: 238
- Thank you received: 37
28 Nov 2023 16:18 #286707
by TheRoslyak
Replied by TheRoslyak on topic Trajectory Planner using Ruckig Lib
In globally, this is not a problem of the trajectory planner. It's about the settings of the postprocessor + machine program + the trajectory generation algorithm in the program. Most likely, you need to tick the boxes so that circular and spiral interpolations are not generated into small segments but execute a full frame. Perhaps this also needs to be specified in the postprocessor if you don't have the proper instructions for generating circular and spiral splines.
Please Log in or Create an account to join the conversation.
- Joco
-
- Offline
- Platinum Member
-
Less
More
- Posts: 532
- Thank you received: 327
28 Nov 2023 20:40 #286726
by Joco
Replied by Joco on topic Trajectory Planner using Ruckig Lib
scurve branch has now been synchronised with Grotius's latest works and proven to compile/run using the build_make and build_cmake script sequence from the cmake directory.
This means no need to setup for OCC compile dependencies.
Cheers - J.
This means no need to setup for OCC compile dependencies.
Cheers - J.
The following user(s) said Thank You: Grotius
Please Log in or Create an account to join the conversation.
- aleksamc
-
- Offline
- Platinum Member
-
Less
More
- Posts: 568
- Thank you received: 67
28 Nov 2023 21:08 - 28 Nov 2023 21:09 #286729
by aleksamc
Replied by aleksamc on topic Trajectory Planner using Ruckig Lib
Currently, it's only for art models - there is no circles and other similar forms. Such g-code could be only parted with small lines.But thanks.
Last edit: 28 Nov 2023 21:09 by aleksamc.
Please Log in or Create an account to join the conversation.
- ihavenofish
- Offline
- Platinum Member
-
Less
More
- Posts: 1013
- Thank you received: 285
28 Nov 2023 23:48 #286739
by ihavenofish
Replied by ihavenofish on topic Trajectory Planner using Ruckig Lib
Modern cad spits out micro segments. A modern machine needs to keep up. Linuxcnc actually does mostly keep up, but without jerk control it can be a rattling experience. G64 mode does smooth over 90% of the moves automatically. The last 10% is what I am hoping will eventually get worked out here.
Please Log in or Create an account to join the conversation.
- Mecanix
- Offline
- Platinum Member
-
Less
More
- Posts: 447
- Thank you received: 227
29 Nov 2023 00:05 #286742
by Mecanix
This project/thread seems the way to go.
Replied by Mecanix on topic Trajectory Planner using Ruckig Lib
True. The CAM I use for 3d contours is all linear output and constrained within "in-tolerance" & "out-tolerance". Can easily put up a beefy half-a-million blocks for a 5-10min machining operation (eg. mold surfacing). I wouldn't expect this to run on Lcnc without an ultra-fast smoothing algo the like of CYCLE832 (Sinumerik).Modern cad spits out micro segments. A modern machine needs to keep up.
This project/thread seems the way to go.
Please Log in or Create an account to join the conversation.
Time to create page: 0.169 seconds