Trajectory Planner using Ruckig Lib
- Grotius
-

- Offline
- Platinum Member
-

Less
More
- Posts: 2419
- Thank you received: 2348
17 Nov 2023 10:36 #285723
by Grotius
Replied by Grotius on topic Debian 12 - 2.9.1 image for the Raspberry Pi 4b/400
Hi,
Github is updates.
Joco, enable ve by setting the hal pin.
I thought to blend the rapids. I think this makes some sence.
Github is updates.
Joco, enable ve by setting the hal pin.
I thought to blend the rapids. I think this makes some sence.
The following user(s) said Thank You: Joco
Please Log in or Create an account to join the conversation.
- dm17ry
-

- Offline
- Elite Member
-

Less
More
- Posts: 206
- Thank you received: 89
17 Nov 2023 12:11 #285733
by dm17ry
Replied by dm17ry on topic Debian 12 - 2.9.1 image for the Raspberry Pi 4b/400
doesn't non-zero end velocity lead to infinite jerks?

Attachments:
The following user(s) said Thank You: Grotius
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
17 Nov 2023 15:25 #285746
by Grotius
Replied by Grotius on topic Debian 12 - 2.9.1 image for the Raspberry Pi 4b/400
This is indeed a problem, i think if Joco test this on his machine he can get a following error.
velocity end=0
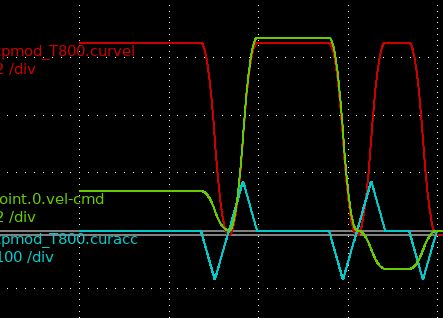
velocity end=1, here you see a vel-cmd jump.
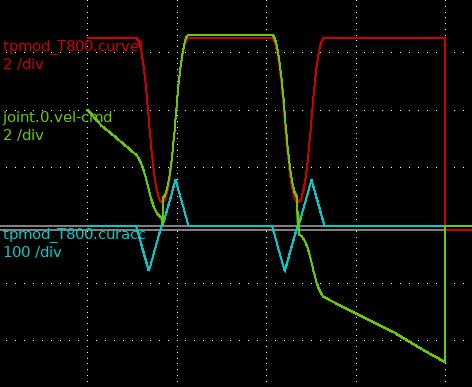
velocity end=0
velocity end=1, here you see a vel-cmd jump.
Attachments:
The following user(s) said Thank You: akb1212
Please Log in or Create an account to join the conversation.
- Joco
-

- Offline
- Platinum Member
-
Less
More
- Posts: 532
- Thank you received: 327
17 Nov 2023 17:45 #285758
by Joco
Replied by Joco on topic Debian 12 - 2.9.1 image for the Raspberry Pi 4b/400
Interesting graphs with the velocity commands diverging. Do we know why that is happening?
Please Log in or Create an account to join the conversation.
- dm17ry
-
- Offline
- Elite Member
-
Less
More
- Posts: 206
- Thank you received: 89
17 Nov 2023 18:27 #285764
by dm17ry
Replied by dm17ry on topic Debian 12 - 2.9.1 image for the Raspberry Pi 4b/400
i suppose we do... i'm probably stating the obvious, but...
when passing any trajectory kink without a complete stop on it - x, y velocities will have a discontinuity.
when passing a transition from a line to an arc - accelerations will have a discontinuity.
some type of blending is required for all transitions: line-line, line-arc, arc-arc.
i guess opencn guys solved that with some matlab witchcraft...
when passing any trajectory kink without a complete stop on it - x, y velocities will have a discontinuity.
when passing a transition from a line to an arc - accelerations will have a discontinuity.
some type of blending is required for all transitions: line-line, line-arc, arc-arc.
i guess opencn guys solved that with some matlab witchcraft...
Please Log in or Create an account to join the conversation.
- Joco
-
- Offline
- Platinum Member
-
Less
More
- Posts: 532
- Thank you received: 327
17 Nov 2023 18:45 #285765
by Joco
Replied by Joco on topic Debian 12 - 2.9.1 image for the Raspberry Pi 4b/400
I like things being spelt out. Assumption is the mother of all F ups.
I have been quietly mapping out calls from control.c which is part of EMCMOT down through to the scurve planner. Building up a relationship graph. When I have that a little more fleshed out will publish.
On blending, want to look into that more as to where and how. Grotius has mentioned (I believe) this would be covered by path rules. At the moment they are pretty basic. Focus has been elsewhere.
I have been quietly mapping out calls from control.c which is part of EMCMOT down through to the scurve planner. Building up a relationship graph. When I have that a little more fleshed out will publish.
On blending, want to look into that more as to where and how. Grotius has mentioned (I believe) this would be covered by path rules. At the moment they are pretty basic. Focus has been elsewhere.
Please Log in or Create an account to join the conversation.
- Becksvill
- Offline
- Elite Member
-
Less
More
- Posts: 206
- Thank you received: 103
17 Nov 2023 19:46 #285770
by Becksvill
Replied by Becksvill on topic Debian 12 - 2.9.1 image for the Raspberry Pi 4b/400
Love your work guys
Joco seems to be doing such a job job testing that I'm standing back a bit.
Once this is almost ready to run I can test it on my 6 ton machine.
Joco seems to be doing such a job job testing that I'm standing back a bit.
Once this is almost ready to run I can test it on my 6 ton machine.
The following user(s) said Thank You: tommylight, Joco, Grotius
Please Log in or Create an account to join the conversation.
- Joco
-
- Offline
- Platinum Member
-
Less
More
- Posts: 532
- Thank you received: 327
18 Nov 2023 01:00 - 18 Nov 2023 08:37 #285791
by Joco
Replied by Joco on topic Trajectory Planner using Ruckig Lib
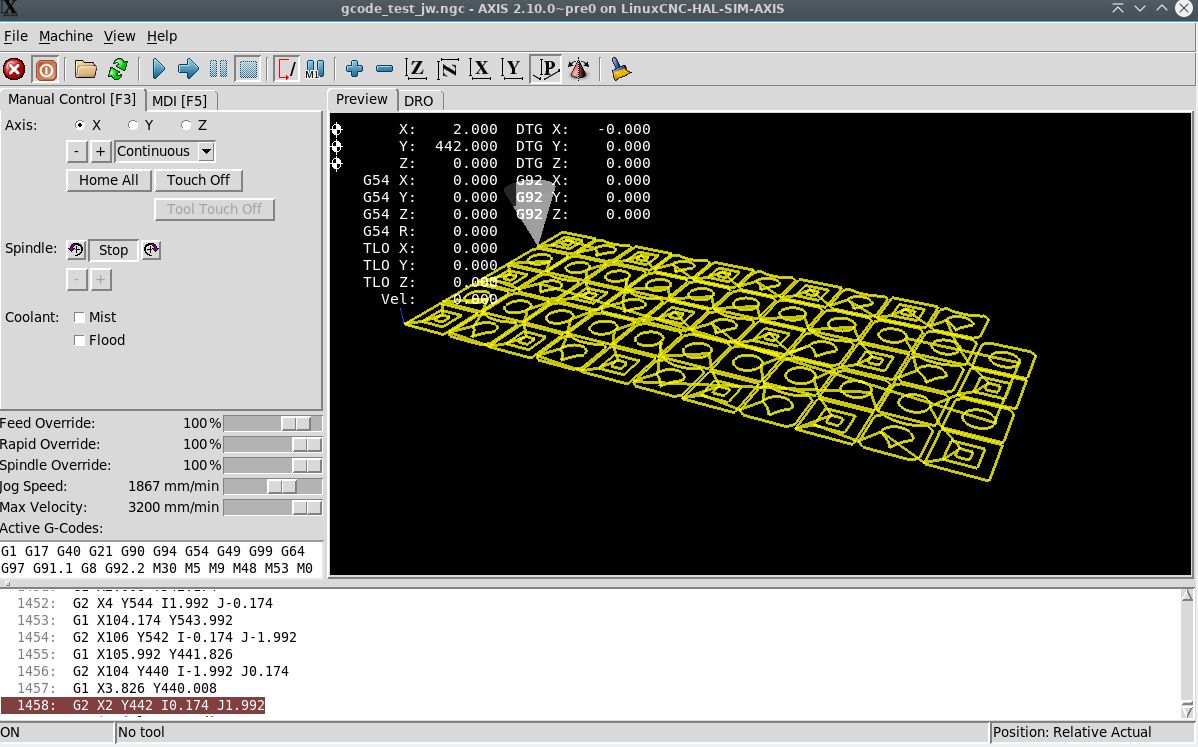
Ran a test of the t800 scurve TP on the plasma. Started out with no ve enabled. Was running like before. Enabled ve with a value of 1. All ok. Set value to 10. Soon after got follow error on a joint and things core-dumped. Will find the time to do a closer/more considered look and try and try and capture screens so we zero in on the point of following error.
I also have max_jerk set at 3000. Might dial that back a bit as well. NB: max acceleration is set at 3000mm/s/s.
Video of the full test file:
Edit: Second run with joint 0 follow error being tracked. Think this needs more investigation as things core dump before any follow error gets graphed.:
This gcode file seems to generate a crash on both the sim and the plasma table. Note that the "crash" in the sim seems to silent. Things just stop at the same point but nothing relevant is trapped in logs.
Cheers - J.
I also have max_jerk set at 3000. Might dial that back a bit as well. NB: max acceleration is set at 3000mm/s/s.
Video of the full test file:
Edit: Second run with joint 0 follow error being tracked. Think this needs more investigation as things core dump before any follow error gets graphed.:
This gcode file seems to generate a crash on both the sim and the plasma table. Note that the "crash" in the sim seems to silent. Things just stop at the same point but nothing relevant is trapped in logs.
Cheers - J.
Attachments:
Last edit: 18 Nov 2023 08:37 by Joco.
The following user(s) said Thank You: Grotius
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
18 Nov 2023 10:58 #285816
by Grotius
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
Hi Joco,
Thanks for testing and showing us the following error.
It's clear we can not use velocity end values if path's are non colineair.
Do you think you can get rid of the pause delay between full stops?
I think it has to do with input values of acc or jerk. If you add hal pin for jerk,
you can set the jerk in the planner during runtime to test different values.
In the future we could code online blending for the planner.
Today i go to invest some time in a out of the box lcnc startup method.

I found a interesting video, at 23:24, can someone explain to me how to solve this matrix?
This looks like the ruckig algo.
Ok, have a nice day so far.
Thanks for testing and showing us the following error.
It's clear we can not use velocity end values if path's are non colineair.
Do you think you can get rid of the pause delay between full stops?
I think it has to do with input values of acc or jerk. If you add hal pin for jerk,
you can set the jerk in the planner during runtime to test different values.
In the future we could code online blending for the planner.
Today i go to invest some time in a out of the box lcnc startup method.
I found a interesting video, at 23:24, can someone explain to me how to solve this matrix?
This looks like the ruckig algo.
Ok, have a nice day so far.
The following user(s) said Thank You: tivoi
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
18 Nov 2023 11:37 #285820
by Grotius
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
@Joco,
Your gcode file runs ok here.
Your gcode file runs ok here.
Attachments:
The following user(s) said Thank You: akb1212, tivoi, Beef
Please Log in or Create an account to join the conversation.
Time to create page: 0.512 seconds