Trajectory Planner using Ruckig Lib
- Grotius
-

- Offline
- Platinum Member
-

Less
More
- Posts: 2419
- Thank you received: 2348
14 Nov 2023 21:30 #285428
by Grotius
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
Added also pause & motion reverse to the cyberdyne component.
Ok now we can make the trajectory planner using velocity end moves. This can be very interesting.

Video:
Ok now we can make the trajectory planner using velocity end moves. This can be very interesting.
Video:
The following user(s) said Thank You: akb1212, Joco
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
14 Nov 2023 21:57 #285429
by Grotius
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
@Joco,
For testing on your machine, could you make a cad drawing of squares 100x100mm with different contours.
This then we could test on your machine with the scurve planner.
Like squares with hard corners and squares with fillets and chamfered corners in different sizes.
Circulair holes, tiny and big, different sizes. etc. Squares containing tiny coliear segments etc.
If this is fertig, we can test the planner trough the most circumstances, and base the path rules on that.
Then your drawing and the ngc file we can upload to the repository.
I have a surprise. I have a new machine on stock, a plasma 2x4m. It's on ethercat.
It can reach fast speeds. It's my last 3d machine design (designed in freecad) and only build one.
In a few weeks, we gonna test the scurve planner on that high end machine. And i don't want any surprise when
the machine is accelerating over 20 m/min.

Let's make the planner on your machine as good as the sound of a Aston Martin 6.0L V12.
Now is the time to build the thirdt scurve planner, using vo's & ve's. (velocity begin & end) values.
Using inertia & gforce impacts. Using path rules.
Any suggestions for the name of this planner?
For testing on your machine, could you make a cad drawing of squares 100x100mm with different contours.
This then we could test on your machine with the scurve planner.
Like squares with hard corners and squares with fillets and chamfered corners in different sizes.
Circulair holes, tiny and big, different sizes. etc. Squares containing tiny coliear segments etc.
If this is fertig, we can test the planner trough the most circumstances, and base the path rules on that.
Then your drawing and the ngc file we can upload to the repository.
I have a surprise. I have a new machine on stock, a plasma 2x4m. It's on ethercat.
It can reach fast speeds. It's my last 3d machine design (designed in freecad) and only build one.
In a few weeks, we gonna test the scurve planner on that high end machine. And i don't want any surprise when
the machine is accelerating over 20 m/min.
Let's make the planner on your machine as good as the sound of a Aston Martin 6.0L V12.
Now is the time to build the thirdt scurve planner, using vo's & ve's. (velocity begin & end) values.
Using inertia & gforce impacts. Using path rules.
Any suggestions for the name of this planner?
The following user(s) said Thank You: akb1212, tivoi, rodw, Joco
Please Log in or Create an account to join the conversation.
- Joco
-

- Offline
- Platinum Member
-
Less
More
- Posts: 532
- Thank you received: 327
14 Nov 2023 23:05 #285439
by Joco
Replied by Joco on topic Trajectory Planner using Ruckig Lib
Will have a look at things either this afternoon or tomorrow. Will mock up the test ngc. I had started doing one similar using octogans, squraes, triablges etc.
Like the sound of that machine! 20m/min acceleration is fast. you don't want things going wrong.
Will have a look over the new code. Just when I start to get a handle on things you move it again! :-p
I was aware of the ruckig "offline" mode where it is all precalculated. I might have a few more clarification questions as I leverage your last explanation of what is going on. Some if it is just common definitions. For example your explanation of what segment meant helped a lot.
Cheers - J.
Like the sound of that machine! 20m/min acceleration is fast. you don't want things going wrong.
Will have a look over the new code. Just when I start to get a handle on things you move it again! :-p
I was aware of the ruckig "offline" mode where it is all precalculated. I might have a few more clarification questions as I leverage your last explanation of what is going on. Some if it is just common definitions. For example your explanation of what segment meant helped a lot.
Cheers - J.
Please Log in or Create an account to join the conversation.
- Joco
-
- Offline
- Platinum Member
-
Less
More
- Posts: 532
- Thank you received: 327
14 Nov 2023 23:20 #285440
by Joco
Replied by Joco on topic Trajectory Planner using Ruckig Lib
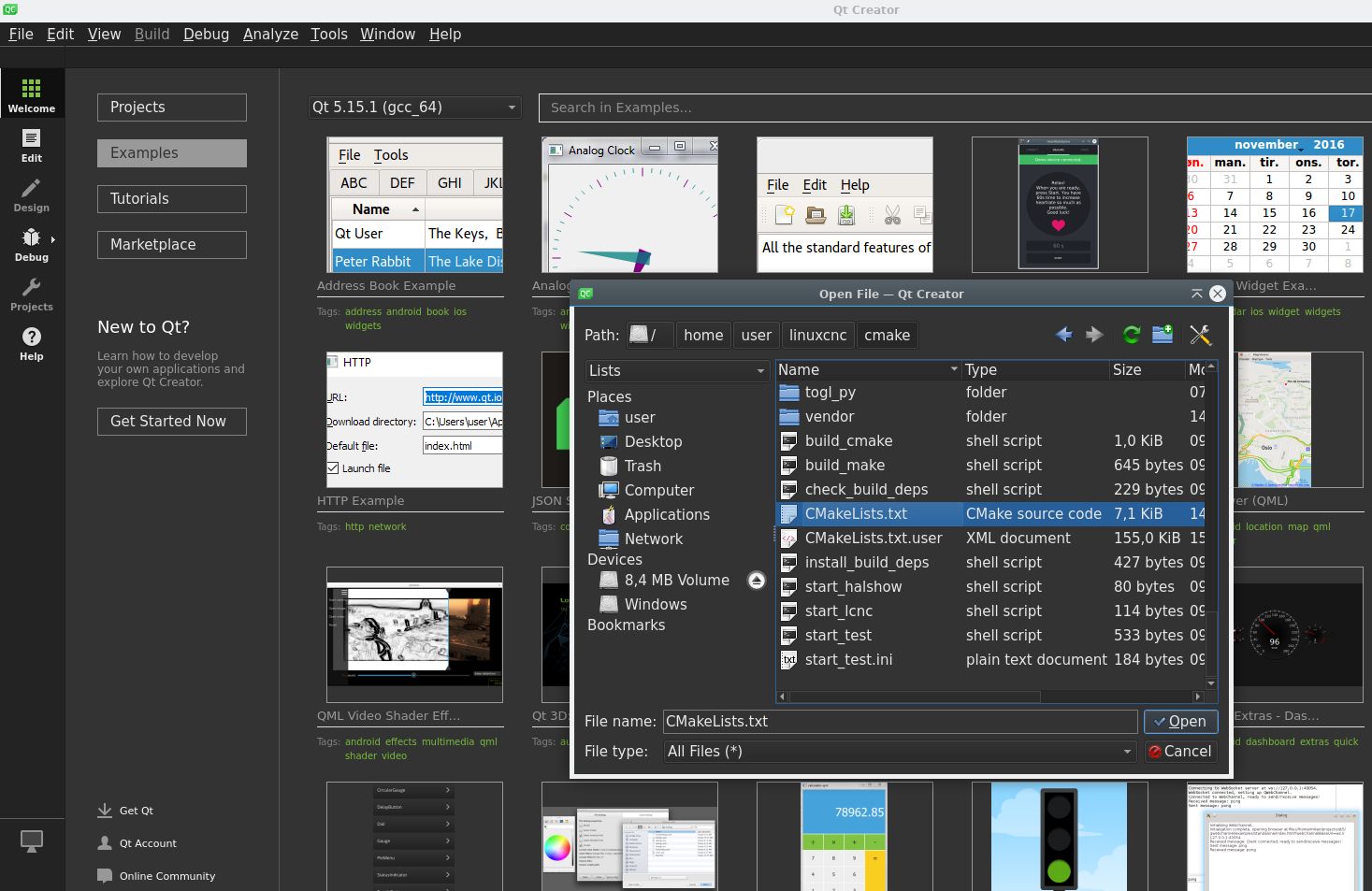
@Grotius - I can see you are using qtcreator as your editor/IDE. Any advice on how to import the exiting project into Creator?
Do you have it managing the cmake files or is that outside the control of Creator and you just import things as a non cmake project so Creator is kept as a simple navigating/editing IDE?
Thanks - J.
Do you have it managing the cmake files or is that outside the control of Creator and you just import things as a non cmake project so Creator is kept as a simple navigating/editing IDE?
Thanks - J.
Please Log in or Create an account to join the conversation.
- Joco
-
- Offline
- Platinum Member
-
Less
More
- Posts: 532
- Thank you received: 327
14 Nov 2023 23:44 #285442
by Joco
Replied by Joco on topic Trajectory Planner using Ruckig Lib
@Grotius - please check open issue on repo. Missing cyberdyne file seems to be breaking the build. At least I can not get it the build and run and that seems to be only obvious issue.
Thanks.
Thanks.
The following user(s) said Thank You: Grotius
Please Log in or Create an account to join the conversation.
- cakeslob
- Offline
- Platinum Member
-
Less
More
- Posts: 926
- Thank you received: 278
15 Nov 2023 03:20 #285448
by cakeslob
t2 judgment day
Replied by cakeslob on topic Trajectory Planner using Ruckig Lib
Any suggestions for the name of this planner?
t2 judgment day
The following user(s) said Thank You: akb1212, Grotius, spumco
Please Log in or Create an account to join the conversation.
- spumco
- Offline
- Platinum Member
-
Less
More
- Posts: 2126
- Thank you received: 882
15 Nov 2023 03:54 #285452
by spumco

Replied by spumco on topic Trajectory Planner using Ruckig Lib
I can't think of anything that isn't amusingly vulgar, so I'll sit back during the naming process.
Any suggestions for the name of this planner?
t2 judgment day
Please Log in or Create an account to join the conversation.
- Joco
-
- Offline
- Platinum Member
-
Less
More
- Posts: 532
- Thank you received: 327
15 Nov 2023 04:27 #285458
by Joco
Replied by Joco on topic Trajectory Planner using Ruckig Lib
Re names and looking abck over the film characters and key referecnce points here is a list:
You could take the pattern of the Terminator series names and extend them for each iteration. The next option is to pick human characters from the films.
Cheers - J.
- Skynet - used
- Cyberdyne - used
- T-800 Model 101
- T-1000
- T-X
- T-600
- T-3000
- Rev-9
- T-900 TOK715
You could take the pattern of the Terminator series names and extend them for each iteration. The next option is to pick human characters from the films.
Cheers - J.
The following user(s) said Thank You: Grotius
Please Log in or Create an account to join the conversation.
- Joco
-
- Offline
- Platinum Member
-
Less
More
- Posts: 532
- Thank you received: 327
15 Nov 2023 06:35 #285462
by Joco
Replied by Joco on topic Trajectory Planner using Ruckig Lib
Proposed sample filw per request. The big square has a mix of normal sides and ones made of a mix of different length coliner lines.
Cheers - J.
Cheers - J.
Attachments:
The following user(s) said Thank You: tivoi, Grotius
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
15 Nov 2023 09:39 #285473
by Grotius
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
@Joco,
Any advice on how to import the exiting project into Creator?
In qt open the cmakelists.txt file, and it loads the project. You can also build it with qt, but to install you can
use one of the build scripts.
Thanks you for the names. ! We choose the next on the list : T-800 Model 101
Thanks for the ngc file.
Any advice on how to import the exiting project into Creator?
In qt open the cmakelists.txt file, and it loads the project. You can also build it with qt, but to install you can
use one of the build scripts.
Thanks you for the names. ! We choose the next on the list : T-800 Model 101
Thanks for the ngc file.
Attachments:
The following user(s) said Thank You: akb1212, tivoi, Joco
Please Log in or Create an account to join the conversation.
Time to create page: 0.748 seconds