Trajectory Planner using Ruckig Lib
- Joco
-

- Offline
- Platinum Member
-

Less
More
- Posts: 532
- Thank you received: 327
29 Nov 2023 00:43 #286743
by Joco
I will have another crack later in the day and if still having issues will attach the config in case you spot a silly mistake.
cheers - J.
Replied by Joco on topic Trajectory Planner using Ruckig Lib
Hi Grotius. I got this compiled on my plasma table and gave it a whirl using the same config in use for previous tests. Just with new runner module active. Things home ok but as soon as I try and run a test ngc joints 0,1,2 all get follow errors. NB this is a 4 joint setup being a gantry machine.Hi Joco,
Good luck with your machine.
Indeed the xyz ruckig back-end runners ensure at least a valid motor output with no velocity jumps.
I still believe in our own trajectory planner, I think we have to add blending to it first.
Then we could use the G64 P0.01.
So i started writing a blending function, 3d blending wich works now for line-line blending. Arc-line blending still todo.
I will have another crack later in the day and if still having issues will attach the config in case you spot a silly mistake.
cheers - J.
Please Log in or Create an account to join the conversation.
- ihavenofish
- Offline
- Platinum Member
-
Less
More
- Posts: 1014
- Thank you received: 285
29 Nov 2023 00:43 #286744
by ihavenofish
Replied by ihavenofish on topic Trajectory Planner using Ruckig Lib
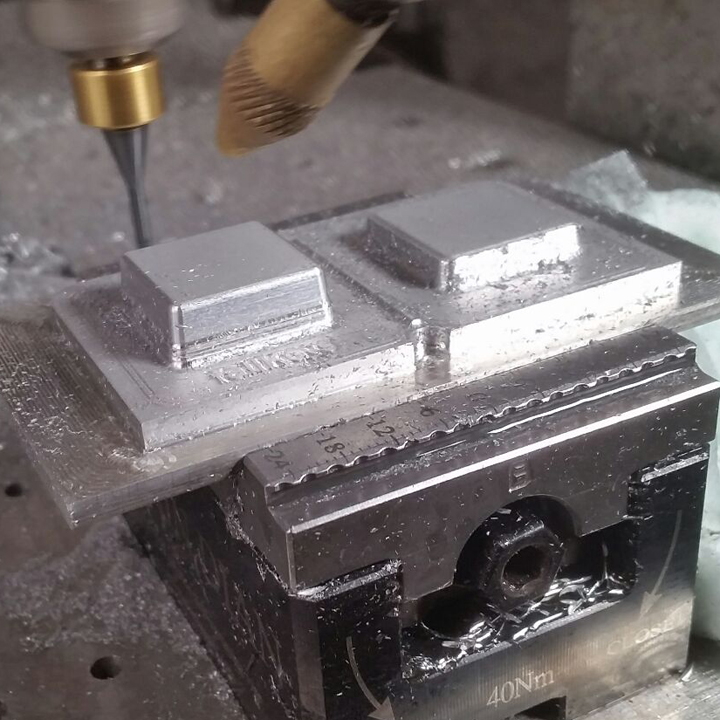
I've been surprised. I recently did a vac form mold in aluminium and it happily moved along at 200+ipm. The limit seems to be the machine, not the software at least in this zone. My program was like 14mb for under 30 mins of cutting.
Attachments:
Please Log in or Create an account to join the conversation.
- Joco
-
- Offline
- Platinum Member
-
Less
More
- Posts: 532
- Thank you received: 327
29 Nov 2023 01:16 #286745
by Joco
Replied by Joco on topic Trajectory Planner using Ruckig Lib
But what accelerations are you running? That’s where the challenges start to appear.
Please Log in or Create an account to join the conversation.
- Mecanix
- Offline
- Platinum Member
-
Less
More
- Posts: 447
- Thank you received: 228
29 Nov 2023 01:39 - 29 Nov 2023 01:44 #286746
by Mecanix
Replied by Mecanix on topic Trajectory Planner using Ruckig Lib
An algo that converts linear moves into velocity continuous splines (i.e. compressor) would sort it. Ain't a programmer's job though (methink), more or less for another world's Master/Adv. Mathematician Job Advert rather! Seeing line-line blending being tested by Grotius is mind-blowing already though...
You guys rock. Hands down. And, Thank you.
You guys rock. Hands down. And, Thank you.
Last edit: 29 Nov 2023 01:44 by Mecanix.
Please Log in or Create an account to join the conversation.
- Joco
-
- Offline
- Platinum Member
-
Less
More
- Posts: 532
- Thank you received: 327
29 Nov 2023 06:23 #286754
by Joco
Replied by Joco on topic Trajectory Planner using Ruckig Lib
@Grotius - did another test and all 4 joints generate follow errors as soon as push the "run" button. Homing works fine.
Attached is the config file in use.
I have run the same ngc using a standard setup of axis with no issues. See attached
Thanks - J.
Attached is the config file in use.
I have run the same ngc using a standard setup of axis with no issues. See attached
Thanks - J.
Attachments:
The following user(s) said Thank You: tivoi, Grotius
Please Log in or Create an account to join the conversation.
- Grotius
-

- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
29 Nov 2023 08:12 - 29 Nov 2023 08:25 #286761
by Grotius
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
Hi Joco,
Maybe try to edit line 816 from tp_runners.c to set lower values.
I used this fixed values to set the runners faster then the tp.
#include "stdio.h"
inline void update_ruckig_followers(TP_STRUCT * const tp){
// printf("update ruckig followers. \n");
rxyz.maxacc=tp->aMax*1.2;
rxyz.maxjerk=tp->max_jerk*10;
rxyz.maxvel = tp->vLimit*1.2;
I hope it will run on real hardware, offline it seemed to work out of the box. Good luck.
Maybe try to edit line 816 from tp_runners.c to set lower values.
I used this fixed values to set the runners faster then the tp.
#include "stdio.h"
inline void update_ruckig_followers(TP_STRUCT * const tp){
// printf("update ruckig followers. \n");
rxyz.maxacc=tp->aMax*1.2;
rxyz.maxjerk=tp->max_jerk*10;
rxyz.maxvel = tp->vLimit*1.2;
I hope it will run on real hardware, offline it seemed to work out of the box. Good luck.
Last edit: 29 Nov 2023 08:25 by Grotius.
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
29 Nov 2023 08:19 #286762
by Grotius
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
@Ihavenofish,
How does a fillet work when like segments are 0.001" long?
I can't say at the moment, fillet code is still not finished.
How does a fillet work when like segments are 0.001" long?
I can't say at the moment, fillet code is still not finished.
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
29 Nov 2023 08:22 #286763
by Grotius
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
@Aleksamc,
May I ask one small question in your topic?
I had one problem with A axis (or any other, that not belong to XYZ).
I generated G-codes in ArtCam (it generates a lot of small pieces with length of movement 0.1mm). When I did such code for A-axis (rotary) I received very slow movement. Solution of that was to rename A to X, as example.
Does your trajectory planner could solve this problem?
This solution is not in the trajecory planner, but i get your point. We are still not ready with coding the trajectory planner.
Later on, we can look at external axis and how to process them outside the xyz tp movement.
May I ask one small question in your topic?
I had one problem with A axis (or any other, that not belong to XYZ).
I generated G-codes in ArtCam (it generates a lot of small pieces with length of movement 0.1mm). When I did such code for A-axis (rotary) I received very slow movement. Solution of that was to rename A to X, as example.
Does your trajectory planner could solve this problem?
This solution is not in the trajecory planner, but i get your point. We are still not ready with coding the trajectory planner.
Later on, we can look at external axis and how to process them outside the xyz tp movement.
The following user(s) said Thank You: aleksamc
Please Log in or Create an account to join the conversation.
- Joco
-
- Offline
- Platinum Member
-
Less
More
- Posts: 532
- Thank you received: 327
29 Nov 2023 08:26 #286764
by Joco
Replied by Joco on topic Trajectory Planner using Ruckig Lib
Hi. Took those increases out so no multiplier in place. Still exactly same problem. Might need to spend some time tracing through where the ferror testing is happening and therefore why it is triggering. Not tonight and not until tomorrow afternoon as will be in the office for most of the day.
Cheers - J.
Cheers - J.
Please Log in or Create an account to join the conversation.
- ihavenofish
- Offline
- Platinum Member
-
Less
More
- Posts: 1014
- Thank you received: 285
29 Nov 2023 14:32 #286786
by ihavenofish
Replied by ihavenofish on topic Trajectory Planner using Ruckig Lib
0.3g acceleration.But what accelerations are you running? That’s where the challenges start to appear.
Please Log in or Create an account to join the conversation.
Time to create page: 0.681 seconds