7i76e: MPG and Analog inputs with pncconf?
- trilobyte
- Offline
- Premium Member
-

Less
More
- Posts: 96
- Thank you received: 5
11 Jan 2019 09:02 #123960
by trilobyte
7i76e: MPG and Analog inputs with pncconf? was created by trilobyte
is it possible to set up the two MPG and the 4 Analog inputs of a 7i76e withe pncconf?
i wired my machine as shown in norberts connection sheet:
forum.linuxcnc.org/27-driver-boards/3191...-sheet?start=0#85072
id like to use one mpg for the x axis and the other for the z axis of my cnc lathe.
The potentiometers should be connected with feed and spindle override etc.
is this possible with pncconf?
Peter
i wired my machine as shown in norberts connection sheet:
forum.linuxcnc.org/27-driver-boards/3191...-sheet?start=0#85072
id like to use one mpg for the x axis and the other for the z axis of my cnc lathe.
The potentiometers should be connected with feed and spindle override etc.
is this possible with pncconf?
Peter
Please Log in or Create an account to join the conversation.
- rodw
-

- Offline
- Platinum Member
-

Less
More
- Posts: 11948
- Thank you received: 4068
11 Jan 2019 10:47 #123964
by rodw
Replied by rodw on topic 7i76e: MPG and Analog inputs with pncconf?
I don't think so.
pncconf is just to get you going. The Mesa ecosystem is so rich, it simply can't do everything. Its time to get your hands dirty and learn how to hand edit hal files.
If yo have a look on my spaceship plasma build, forum.linuxcnc.org/show-your-stuff/32029...-plasma-cutter-build there is a complete worked example on how to use a MPG on a 7i76e.
As far as the analog inputs go, I have only had a quick play but the pin value is the voltage on the pin. Just patch it to your 24 volt power and use halshow to view the results and you will get your head around it pretty quickly.
pncconf is just to get you going. The Mesa ecosystem is so rich, it simply can't do everything. Its time to get your hands dirty and learn how to hand edit hal files.
If yo have a look on my spaceship plasma build, forum.linuxcnc.org/show-your-stuff/32029...-plasma-cutter-build there is a complete worked example on how to use a MPG on a 7i76e.
As far as the analog inputs go, I have only had a quick play but the pin value is the voltage on the pin. Just patch it to your 24 volt power and use halshow to view the results and you will get your head around it pretty quickly.
Please Log in or Create an account to join the conversation.
- cmorley
- Offline
- Moderator
-

Less
More
- Posts: 7316
- Thank you received: 2147
11 Jan 2019 11:27 #123966
by cmorley
Replied by cmorley on topic 7i76e: MPG and Analog inputs with pncconf?
pncconf can configure 7i76e in mode 2 which allows two MPGs and analog inputs.
Select mode 2 on the I/O connector 1.
There is no way to configure the analog inputs in pncconf.
You can do that manually in one of the HAL files.
Chris M
Select mode 2 on the I/O connector 1.
There is no way to configure the analog inputs in pncconf.
You can do that manually in one of the HAL files.
Chris M
Please Log in or Create an account to join the conversation.
- pl7i92
-

- Offline
- Platinum Member
-
Less
More
- Posts: 1872
- Thank you received: 358
11 Jan 2019 18:21 #123983
by pl7i92
Replied by pl7i92 on topic 7i76e: MPG and Analog inputs with pncconf?
You may use a USB XHC-HB04 MPG gives You alot of options

Please Log in or Create an account to join the conversation.
- trilobyte
- Offline
- Premium Member
-
Less
More
- Posts: 96
- Thank you received: 5
11 Jan 2019 21:17 - 11 Jan 2019 21:43 #123990
by trilobyte
Replied by trilobyte on topic 7i76e: MPG and Analog inputs with pncconf?
>pncconf can configure 7i76e in mode 2 which allows two MPGs and analog inputs.
>Select mode 2 on the I/O connector 1.
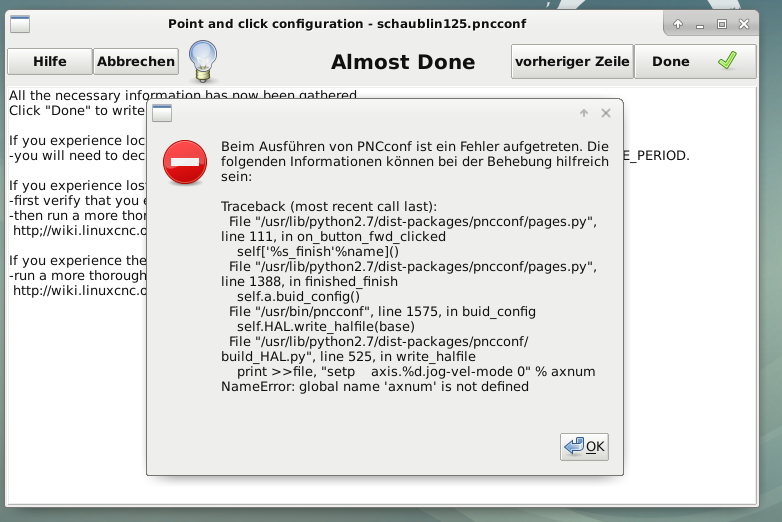
if i select this mode 2 pncconf crashes when i try to safe and quit:
>Select mode 2 on the I/O connector 1.
if i select this mode 2 pncconf crashes when i try to safe and quit:
Attachments:
Last edit: 11 Jan 2019 21:43 by trilobyte. Reason: screenshot added
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 11948
- Thank you received: 4068
11 Jan 2019 21:44 #123993
by rodw
Replied by rodw on topic 7i76e: MPG and Analog inputs with pncconf?
Try changing to
sserial_port_0=2xxxx
sserial_port_0=2xxxx
Please Log in or Create an account to join the conversation.
- cmorley
- Offline
- Moderator
-
Less
More
- Posts: 7316
- Thank you received: 2147
11 Jan 2019 22:47 #123997
by cmorley
I tried this in the latest version of pncconf in the 2.7 branch - what version of linuxcnc are you using?
it has to do with the selection of external MPG, on the external controls page. What option did you select and what di you select for the MPG encoder in the mesa page?
Chris M
Replied by cmorley on topic 7i76e: MPG and Analog inputs with pncconf?
>pncconf can configure 7i76e in mode 2 which allows two MPGs and analog inputs.
>Select mode 2 on the I/O connector 1.
if i select this mode 2 pncconf crashes when i try to safe and quit:
I tried this in the latest version of pncconf in the 2.7 branch - what version of linuxcnc are you using?
it has to do with the selection of external MPG, on the external controls page. What option did you select and what di you select for the MPG encoder in the mesa page?
Chris M
Please Log in or Create an account to join the conversation.
- trilobyte
- Offline
- Premium Member
-
Less
More
- Posts: 96
- Thank you received: 5
12 Jan 2019 07:57 - 12 Jan 2019 08:41 #124017
by trilobyte
Replied by trilobyte on topic 7i76e: MPG and Analog inputs with pncconf?
i'm using the latest master 2.8xxx
i tryed different options in the external controls page. if i set the mode 2 in the I/O connector 1will crash if i try to finish the pnccconf.
i get 3 potentiometers running. i found some code from a 2.7 installation. the first 3 blocks are running after smal changes.
but for the jog speed this looks different. can someone help me with the fourth block of code? the one vor the jog speed.
#----Analog-In
#
loadrt conv_float_s32 names=conv_float_s32.feed,conv_float_s32.spindel,conv_float_s32.maxvel,conv_float_s32.maxjog
addf conv_float_s32.feed servo-thread
addf conv_float_s32.spindel servo-thread
addf conv_float_s32.maxvel servo-thread
addf conv_float_s32.maxjog servo-thread
setp halui.feed-override.scale 0.01277777777777
setp halui.feed-override.direct-value true
setp hm2_7i76e.0.7i76.0.0.analogin0-scalemax 200
net halui.feedanalog <= hm2_7i76e.0.7i76.0.0.analogin0 => conv_float_s32.feed.in
net feedanalog conv_float_s32.feed.out => halui.feed-override.counts
setp halui.spindle.0.override.scale 0.01277777777777
setp halui.spindle.0.override.direct-value true
setp hm2_7i76e.0.7i76.0.0.analogin1-scalemax 180
net halui.spindelanalog <= hm2_7i76e.0.7i76.0.0.analogin1 => conv_float_s32.spindel.in
net spindelanalog conv_float_s32.spindel.out => halui.spindle.0.override.counts
setp halui.max-velocity.scale 1
setp halui.max-velocity.direct-value true
setp hm2_7i76e.0.7i76.0.0.analogin2-scalemax 100
net halui.maxvelanalog <= hm2_7i76e.0.7i76.0.0.analogin2 => conv_float_s32.maxvel.in
net maxvelanalog conv_float_s32.maxvel.out => halui.max-velocity.counts
#setp halui.jog-vel.scale 1
#setp halui.jog-speed.direct-value true
setp hm2_7i76e.0.7i76.0.0.analogin3-scalemax 100
net halui.maxjoganalog <= hm2_7i76e.0.7i76.0.0.analogin3 => conv_float_s32.maxjog.in
#net maxjoganalog conv_float_s32.maxjog.out => jog-speed
i tryed different options in the external controls page. if i set the mode 2 in the I/O connector 1will crash if i try to finish the pnccconf.
i get 3 potentiometers running. i found some code from a 2.7 installation. the first 3 blocks are running after smal changes.
but for the jog speed this looks different. can someone help me with the fourth block of code? the one vor the jog speed.
#----Analog-In
#
loadrt conv_float_s32 names=conv_float_s32.feed,conv_float_s32.spindel,conv_float_s32.maxvel,conv_float_s32.maxjog
addf conv_float_s32.feed servo-thread
addf conv_float_s32.spindel servo-thread
addf conv_float_s32.maxvel servo-thread
addf conv_float_s32.maxjog servo-thread
setp halui.feed-override.scale 0.01277777777777
setp halui.feed-override.direct-value true
setp hm2_7i76e.0.7i76.0.0.analogin0-scalemax 200
net halui.feedanalog <= hm2_7i76e.0.7i76.0.0.analogin0 => conv_float_s32.feed.in
net feedanalog conv_float_s32.feed.out => halui.feed-override.counts
setp halui.spindle.0.override.scale 0.01277777777777
setp halui.spindle.0.override.direct-value true
setp hm2_7i76e.0.7i76.0.0.analogin1-scalemax 180
net halui.spindelanalog <= hm2_7i76e.0.7i76.0.0.analogin1 => conv_float_s32.spindel.in
net spindelanalog conv_float_s32.spindel.out => halui.spindle.0.override.counts
setp halui.max-velocity.scale 1
setp halui.max-velocity.direct-value true
setp hm2_7i76e.0.7i76.0.0.analogin2-scalemax 100
net halui.maxvelanalog <= hm2_7i76e.0.7i76.0.0.analogin2 => conv_float_s32.maxvel.in
net maxvelanalog conv_float_s32.maxvel.out => halui.max-velocity.counts
#setp halui.jog-vel.scale 1
#setp halui.jog-speed.direct-value true
setp hm2_7i76e.0.7i76.0.0.analogin3-scalemax 100
net halui.maxjoganalog <= hm2_7i76e.0.7i76.0.0.analogin3 => conv_float_s32.maxjog.in
#net maxjoganalog conv_float_s32.maxjog.out => jog-speed
Last edit: 12 Jan 2019 08:41 by trilobyte.
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 11948
- Thank you received: 4068
12 Jan 2019 09:41 #124020
by rodw
Replied by rodw on topic 7i76e: MPG and Analog inputs with pncconf?
This assumes that you use 1 MPG for all axes and you use a binary coded selection switch so you only use two inputs to set 4 sale settings one of them is 0 or OFF. The order of the mux4.in's is dependent on my hardware but it is a metric machine so in mm.
loadrt mux4 count=1
addf mux4.0 servo-thread
# Scale Select
setp mux4.0.in0 0.0
setp mux4.0.in1 1.0
setp mux4.0.in2 0.01
setp mux4.0.in3 0.1
net mux4-sel1 <= hm2_7i76e.0.7i76.0.0.input-22
net mux4-sel0 <= hm2_7i76e.0.7i76.0.0.input-21
net mux4-sel1 => mux4.0.sel1
net mux4-sel0 => mux4.0.sel0
net jog-scale <= mux4.0.out
net jog-scale => axis.x.jog-scale
net jog-scale => axis.y.jog-scale
net jog-scale => axis.z.jog-scalePlease Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 11948
- Thank you received: 4068
12 Jan 2019 09:58 - 12 Jan 2019 10:02 #124021
by rodw
Replied by rodw on topic 7i76e: MPG and Analog inputs with pncconf?
For completeness, I will add my axis selct code here. Normally you would use another mux4 component but in my case I have a 6 axis selection knob on my pendant so I've used a mux8 paired with a select8. This lets me add another 3 controls. eg. I could use the Axis 4 selection setting to control reverse run to step back and forth in the g code. (maybe....).
Also note you need to convert the data type to keep select8 happy.
Hope I've copied accross everything you need....
Also note you need to convert the data type to keep select8 happy.
loadrt mux8 count=1
loadrt select8 count=1
loadrt conv_float_s32 count=1
addf mux8.0 servo-thread
addf select8.0 servo-thread
addf conv-float-s32.0 servo-thread
#Axis Select (0=off, 1=x, 2=z, 3=y, na, 5=6, 6=4, 7=5)
setp mux8.0.in0 0
setp mux8.0.in1 1
setp mux8.0.in2 2
setp mux8.0.in3 3
setp mux8.0.in4 4
setp mux8.0.in5 5
setp mux8.0.in6 6
setp mux8.0.in7 7
net mux8-sel0 <= hm2_7i76e.0.7i76.0.0.input-23
net mux8-sel1 <= hm2_7i76e.0.7i76.0.0.input-24
net mux8-sel2 <= hm2_7i76e.0.7i76.0.0.input-25
net mux8-sel0 => mux8.0.sel0
net mux8-sel1 => mux8.0.sel1
net mux8-sel2 => mux8.0.sel2
net mux-float conv-float-s32.0.in <= mux8.0.out
net mux-s32 <= conv-float-s32.0.out
net mux-s32 => select8.0.sel
net axis-select-x <= select8.0.out1
net axis-select-y <= select8.0.out3
net axis-select-z <= select8.0.out2
net axis-select-4 <= select8.0.out6
net axis-select-5 <= select8.0.out7
net axis-select-6 <= select8.0.out5
net axis-select-x => axis.x.jog-enable
net axis-select-y => axis.y.jog-enable
net axis-select-z => axis.z.jog-enable
# Encoder counts
net jog-counter <= hm2_7i76e.0.7i76.0.0.enc0.count
net jog-counter => axis.x.jog-counts
net jog-counter => axis.y.jog-counts
net jog-counter => axis.z.jog-counts
Hope I've copied accross everything you need....
Last edit: 12 Jan 2019 10:02 by rodw.
Please Log in or Create an account to join the conversation.
Moderators: cmorley
Time to create page: 0.245 seconds