- Configuring LinuxCNC
- Basic Configuration
- Skew correction/perpendicularity correction (millkins or millkins_xyz)
Skew correction/perpendicularity correction (millkins or millkins_xyz)
- abdulasis12
- Offline
- Premium Member
-

Less
More
- Posts: 133
- Thank you received: 8
30 Nov 2024 08:16 #315618
by abdulasis12
Replied by abdulasis12 on topic Skew correction/perpendicularity correction (millkins or millkins_xyz)
Hi
I want somebody help
I think now my CNC problem seem this topic.
My CNC XYZ and Y correct linear move
my X axis table on Y-axis base it's Skewed angle .
forum.linuxcnc.org/49-basic-configuratio...s-xyz?start=0#280714
I D/L this file from MR.Aciera
I open terminal and compile file
asis@192:~/Downloads/skewkins$ sudo halcompile --install skewkins.comp
[sudo] password for asis:
Compiling realtime skewkins.c
Linking skewkins.so
cp skewkins.so /usr/lib/linuxcnc/modules/
asis@192:~/Downloads/skewkins$
I open hal
#loadrt [KINS]KINEMATICS
loadrt skewkins
setp skewkins.skew 0.01
I open ini
[KINS]
JOINTS = 4
KINEMATICS = skewkins
this problem when run linuxcnc
***********
Debug file information:
Note: Using POSIX realtime
./217-4x.hal:7: parameter or pin 'skewkins.skew' not found
9192
Stopping realtime threads
Unloading hal components
Note: Using POSIX realtime
*********
what i'm wrong ?
Asis,
I want somebody help
I think now my CNC problem seem this topic.
My CNC XYZ and Y correct linear move
my X axis table on Y-axis base it's Skewed angle .
forum.linuxcnc.org/49-basic-configuratio...s-xyz?start=0#280714
I D/L this file from MR.Aciera
I open terminal and compile file
asis@192:~/Downloads/skewkins$ sudo halcompile --install skewkins.comp
[sudo] password for asis:
Compiling realtime skewkins.c
Linking skewkins.so
cp skewkins.so /usr/lib/linuxcnc/modules/
asis@192:~/Downloads/skewkins$
I open hal
#loadrt [KINS]KINEMATICS
loadrt skewkins
setp skewkins.skew 0.01
I open ini
[KINS]
JOINTS = 4
KINEMATICS = skewkins
this problem when run linuxcnc
***********
Debug file information:
Note: Using POSIX realtime
./217-4x.hal:7: parameter or pin 'skewkins.skew' not found
9192
Stopping realtime threads
Unloading hal components
Note: Using POSIX realtime
*********
what i'm wrong ?
Asis,
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4754
- Thank you received: 2134
30 Nov 2024 09:48 #315627
by Aciera
Replied by Aciera on topic Skew correction/perpendicularity correction (millkins or millkins_xyz)
that kinematic does not have a pin called 'skewkins.skew'. Try 'skewkins.skew-y':
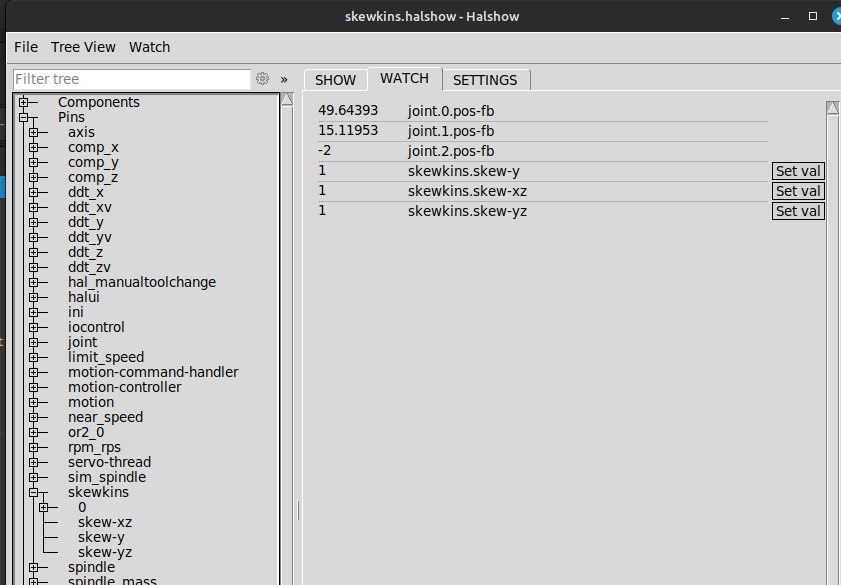
Attachments:
The following user(s) said Thank You: abdulasis12
Please Log in or Create an account to join the conversation.
- abdulasis12
- Offline
- Premium Member
-
Less
More
- Posts: 133
- Thank you received: 8
02 Dec 2024 11:30 #315779
by abdulasis12
Replied by abdulasis12 on topic Skew correction/perpendicularity correction (millkins or millkins_xyz)
Hi Aciera
Thank you, Now look its working when jog I will caribrate my cnc new again.
this unit is angle ?
Thank you,

Asis
Thank you, Now look its working when jog I will caribrate my cnc new again.
this unit is angle ?
Thank you,
Asis
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4754
- Thank you received: 2134
02 Dec 2024 12:17 - 02 Dec 2024 12:18 #315783
by Aciera
Replied by Aciera on topic Skew correction/perpendicularity correction (millkins or millkins_xyz)
It's a ratio. units of skew in Y per unit of travel in X. If you set 'skew-y' to 0.1 then moving the y-axis in the positive direction will have the x-axis move 0.1 units in the negative direction for every unit of y-travel.
j [0] = pos->tran.x - pos->tran.y*(*(haldata->skew_y)) - pos->tran.z*(*(haldata->skew_xz));
j [1] = pos->tran.y - pos->tran.z*(*(haldata->skew_yz));
j [2] = pos->tran.z;
Last edit: 02 Dec 2024 12:18 by Aciera.
The following user(s) said Thank You: tommylight, abdulasis12
Please Log in or Create an account to join the conversation.
- abdulasis12
- Offline
- Premium Member
-
Less
More
- Posts: 133
- Thank you received: 8
20 Dec 2024 04:51 #317025
by abdulasis12
Replied by abdulasis12 on topic Skew correction/perpendicularity correction (millkins or millkins_xyz)
Hi
I have question.I would like to know if I can use skewkins together with xyzac-trt-kins. If it is possible to use them together, what steps do I need to take? Please provide me with some guidance.
Thank you,
Asis
I have question.I would like to know if I can use skewkins together with xyzac-trt-kins. If it is possible to use them together, what steps do I need to take? Please provide me with some guidance.
Thank you,
Asis
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4754
- Thank you received: 2134
20 Dec 2024 08:30 #317031
by Aciera
Replied by Aciera on topic Skew correction/perpendicularity correction (millkins or millkins_xyz)
You would need to add the 'skew-y' pin and the corrective terms to the forward and inverse kinematic models of the xyzac-trt kins.
Please Log in or Create an account to join the conversation.
- abdulasis12
- Offline
- Premium Member
-
Less
More
- Posts: 133
- Thank you received: 8
20 Dec 2024 10:03 #317035
by abdulasis12
This I understand.
corrective terms to the forward and inverse kinematic models of the xyzac-trt kins.
This is hard for me , not understand.
Now I open .hal of xyzbc and i add
loadrt skewkins
before line
loadrt xyzbc-trt-kins sparm=identityfirst
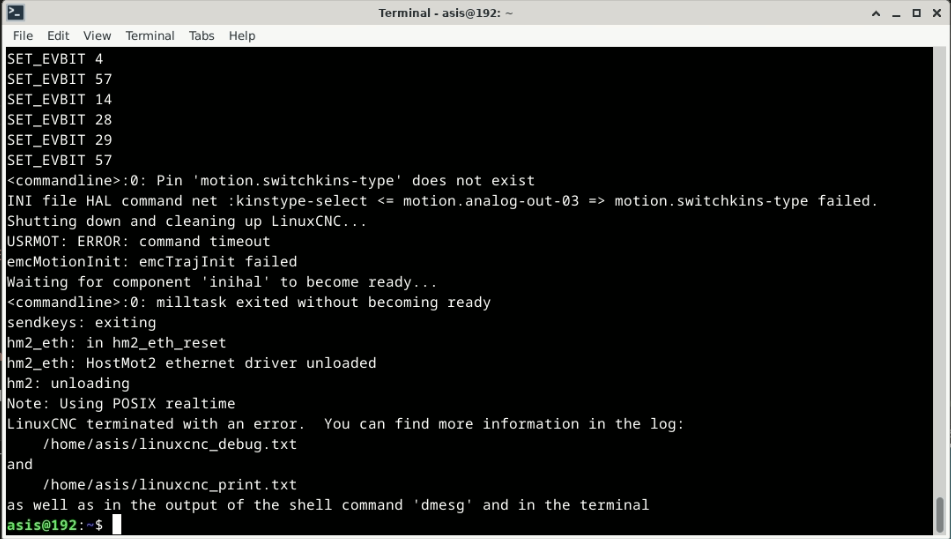
try to run linuxcnc and error :
<commandline>:0: Pin 'motion.switchkins-type' does not exist
INI file HAL command net :kinstype-select <= motion.analog-out-03 => motion.switchkins-type failed.
Could you please guide me? I am ready to learn it
Thank you,
Asis
Replied by abdulasis12 on topic Skew correction/perpendicularity correction (millkins or millkins_xyz)
need to add the 'skew-y' pinYou would need to add the 'skew-y' pin and the corrective terms to the forward and inverse kinematic models of the xyzac-trt kins.
This I understand.
corrective terms to the forward and inverse kinematic models of the xyzac-trt kins.
This is hard for me , not understand.
Now I open .hal of xyzbc and i add
loadrt skewkins
before line
loadrt xyzbc-trt-kins sparm=identityfirst
try to run linuxcnc and error :
<commandline>:0: Pin 'motion.switchkins-type' does not exist
INI file HAL command net :kinstype-select <= motion.analog-out-03 => motion.switchkins-type failed.
Could you please guide me? I am ready to learn it
Thank you,
Asis
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4754
- Thank you received: 2134
20 Dec 2024 12:19 - 20 Dec 2024 12:21 #317038
by Aciera
Replied by Aciera on topic Skew correction/perpendicularity correction (millkins or millkins_xyz)
you have to build the skew function into the xyzbc-trt kinematics file and recompile it.
github.com/LinuxCNC/linuxcnc/blob/master...inematics/trtfuncs.c
github.com/LinuxCNC/linuxcnc/blob/master...inematics/trtfuncs.c
Last edit: 20 Dec 2024 12:21 by Aciera.
The following user(s) said Thank You: abdulasis12
Please Log in or Create an account to join the conversation.
- abdulasis12
- Offline
- Premium Member
-
Less
More
- Posts: 133
- Thank you received: 8
20 Dec 2024 13:29 #317040
by abdulasis12
Replied by abdulasis12 on topic Skew correction/perpendicularity correction (millkins or millkins_xyz)
Hi MR.Aciera
Thank you, for fast reply .
maybe I will use a lot time for learn it to combine code it's new for me (java right ?) but I will try first.
Thank you,
Asis
Thank you, for fast reply .
maybe I will use a lot time for learn it to combine code it's new for me (java right ?) but I will try first.
Thank you,
Asis
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4754
- Thank you received: 2134
20 Dec 2024 13:32 - 20 Dec 2024 13:33 #317041
by Aciera
Replied by Aciera on topic Skew correction/perpendicularity correction (millkins or millkins_xyz)
It's written in C not java
Last edit: 20 Dec 2024 13:33 by Aciera.
Please Log in or Create an account to join the conversation.
- Configuring LinuxCNC
- Basic Configuration
- Skew correction/perpendicularity correction (millkins or millkins_xyz)
Time to create page: 0.502 seconds