- Configuring LinuxCNC
- Basic Configuration
- Skew correction/perpendicularity correction (millkins or millkins_xyz)
Skew correction/perpendicularity correction (millkins or millkins_xyz)
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4718
- Thank you received: 2114
26 Dec 2024 15:33 #317412
by Aciera
Replied by Aciera on topic Skew correction/perpendicularity correction (millkins or millkins_xyz)
you need to install the build dependencies. See 4.2.2 in the linked documentation above.
Please Log in or Create an account to join the conversation.
- abdulasis12
- Offline
- Premium Member
-

Less
More
- Posts: 133
- Thank you received: 8
26 Dec 2024 16:31 #317417
by abdulasis12
Replied by abdulasis12 on topic Skew correction/perpendicularity correction (millkins or millkins_xyz)
I think now it's success compile.
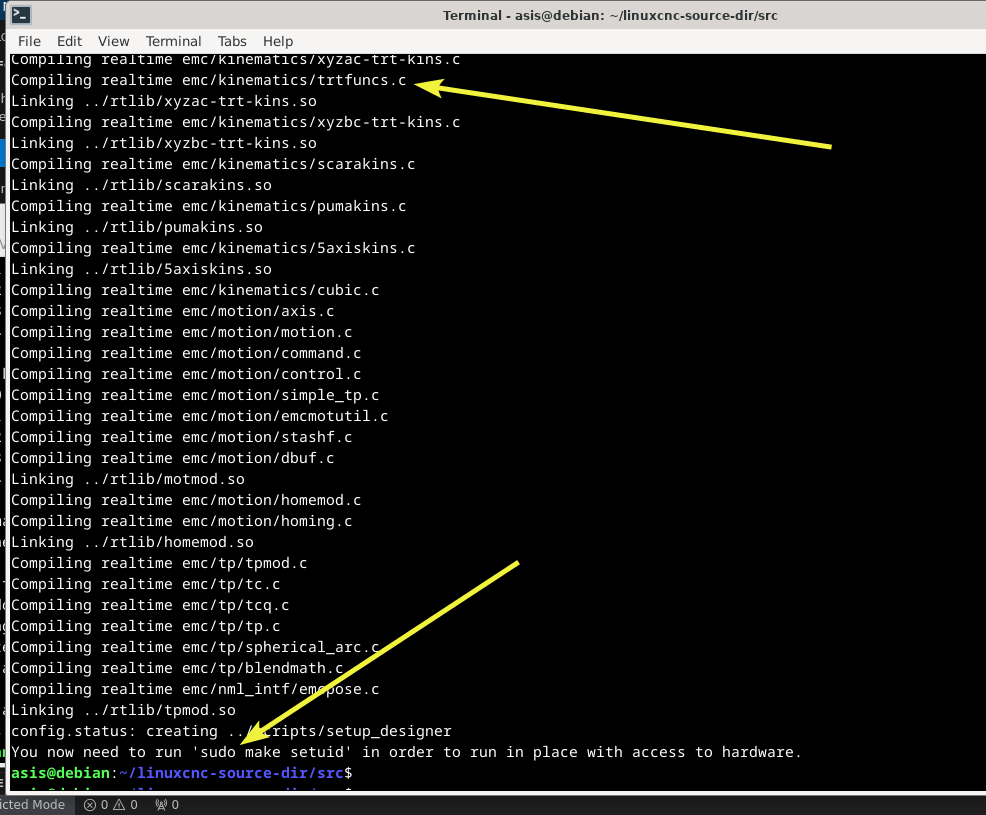
then I cmd : sudo make setuid
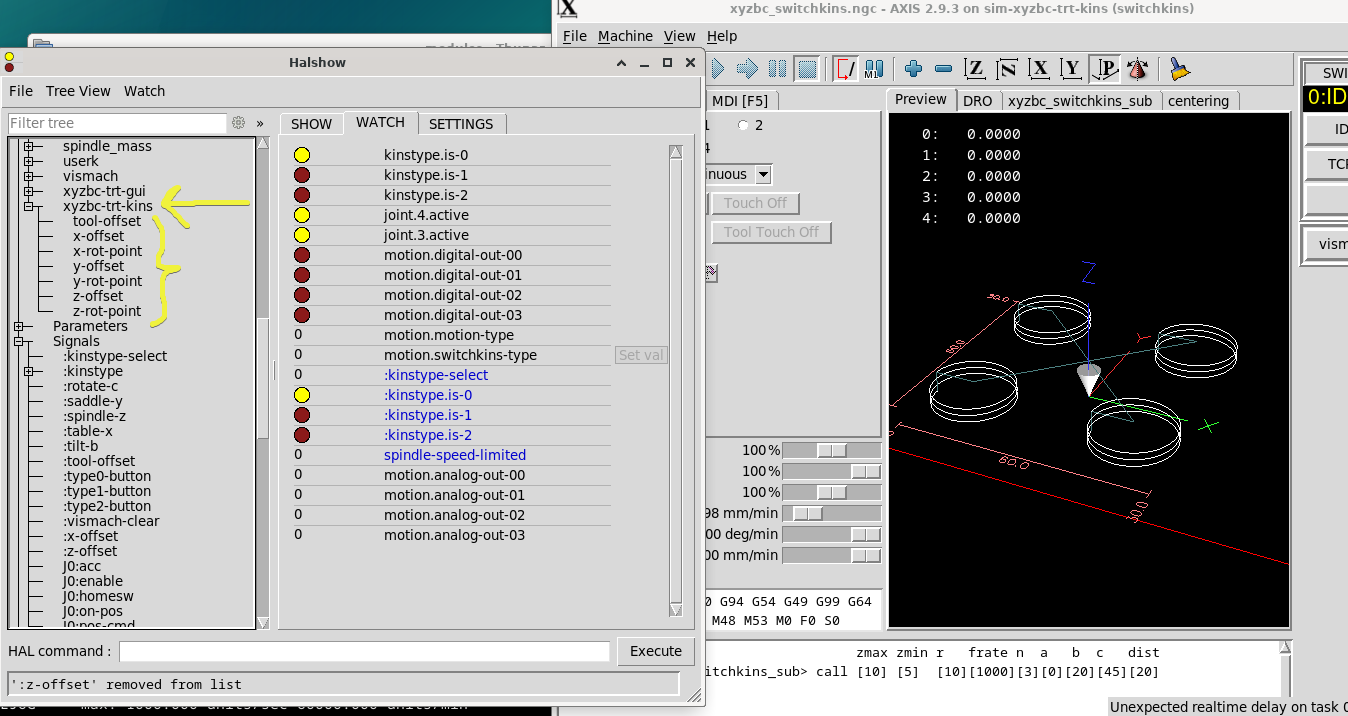
I try open sim xyzbc-trt-kins
I'm open hallshow and click to check inside pin--> xyzbc-trt-kins but not have show pin skew-y
have any step ?
Thank you,
Asis
then I cmd : sudo make setuid
I try open sim xyzbc-trt-kins
I'm open hallshow and click to check inside pin--> xyzbc-trt-kins but not have show pin skew-y
have any step ?
Thank you,
Asis
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4718
- Thank you received: 2114
26 Dec 2024 17:36 #317421
by Aciera
Replied by Aciera on topic Skew correction/perpendicularity correction (millkins or millkins_xyz)
1. Note that the compiled installation is separate from the package installation you worked with before so you need to modify '~/linuxcnc-source-dir/src/emc/kinematics/trtfuncs.c'
2. then cd to ~/linuxcnc-source-dir/src and run
3. if that was successful you can start the compiled installation:
2. then cd to ~/linuxcnc-source-dir/src and run
make3. if that was successful you can start the compiled installation:
cd ~/linuxcnc-source-dirsource scripts/rip-environmentlinuxcnc
The following user(s) said Thank You: abdulasis12
Please Log in or Create an account to join the conversation.
- abdulasis12
- Offline
- Premium Member
-
Less
More
- Posts: 133
- Thank you received: 8
27 Dec 2024 08:44 - 27 Dec 2024 08:44 #317456
by abdulasis12
Replied by abdulasis12 on topic Skew correction/perpendicularity correction (millkins or millkins_xyz)
Hi Aciera,
Now it's Work !!!
I miss source scripts/rip-environment
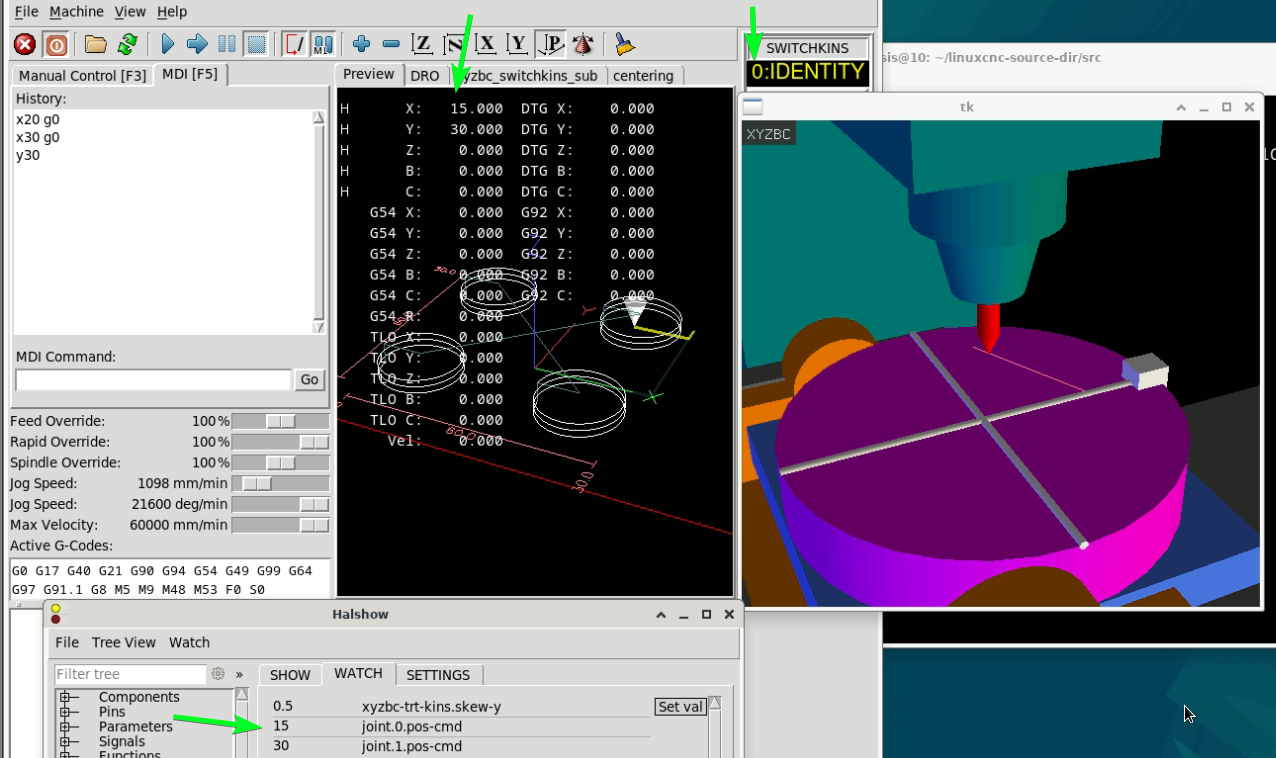
But....I think not correct output When in Mode : 0 Identify , because Identify not have skew
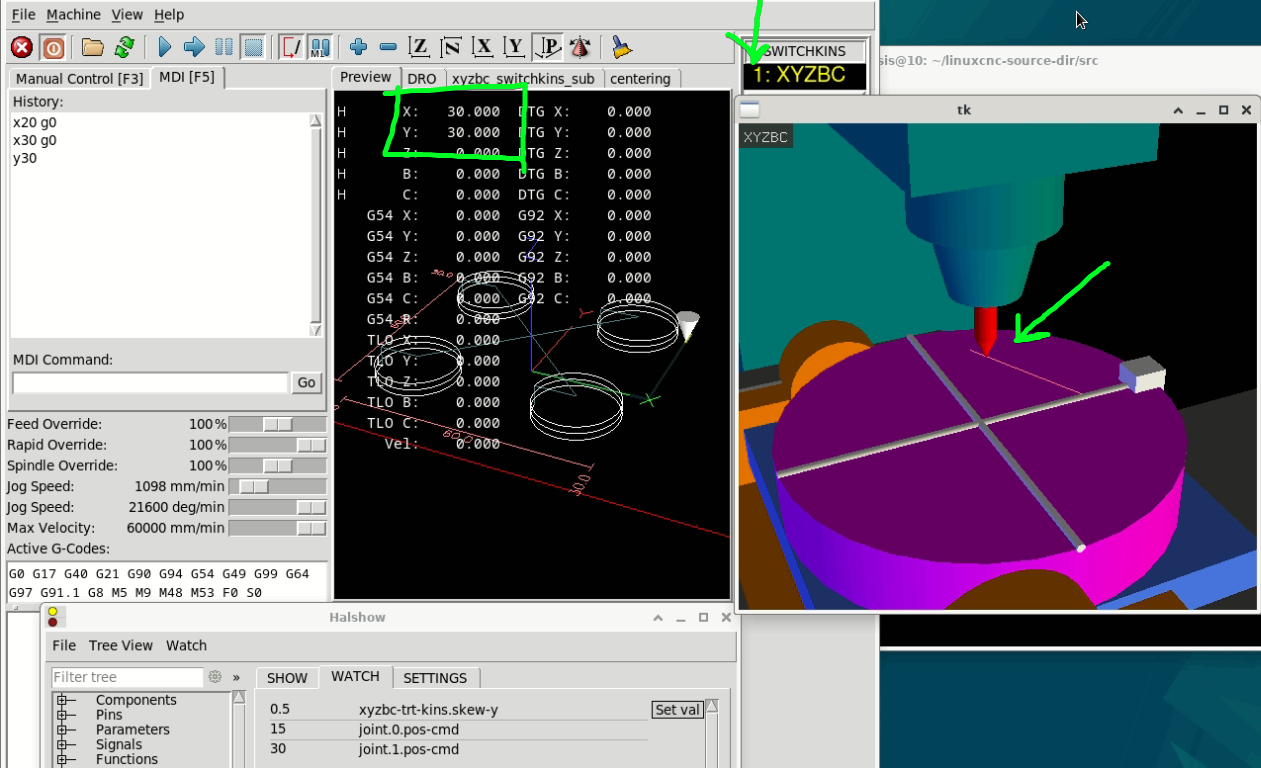
when change to mode to : 1 TCP , Y move and X skew correct
When I turn off TCP change to : 0 Identify Mode . X will change to Y/0.5 off skew
In picture Mode 1 TCP
X30
Y30
Then, I change mode from 1 (TCP) to 0 (Identify) X and Y will change to
X15
Y30
In real I think in DRO will X30 Y30 (I think you understand me)
can you help me for check code again ? ^^"
Super thanks,
Asis
Now it's Work !!!
I miss source scripts/rip-environment
But....I think not correct output When in Mode : 0 Identify , because Identify not have skew
when change to mode to : 1 TCP , Y move and X skew correct
When I turn off TCP change to : 0 Identify Mode . X will change to Y/0.5 off skew
In picture Mode 1 TCP
X30
Y30
Then, I change mode from 1 (TCP) to 0 (Identify) X and Y will change to
X15
Y30
In real I think in DRO will X30 Y30 (I think you understand me)
can you help me for check code again ? ^^"
Super thanks,
Asis
Attachments:
Last edit: 27 Dec 2024 08:44 by abdulasis12.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4718
- Thank you received: 2114
27 Dec 2024 10:30 #317458
by Aciera
Replied by Aciera on topic Skew correction/perpendicularity correction (millkins or millkins_xyz)
That is correct there is no skew correction in identity kinematics. Note though that my modifications are NOT what you need as the skew is in the work coordinate system (ie the correction rotates with the table) which is not correct, you want the skew correction to be applied to the machine coordinate system (ie it remains oriented to the machine joints regardless of table rotation).
To make a serious effort to get this working I would not bother with the built in trt kinematics but would use the more recently added userkins.comp template and build a new kinematic from scratch.
Re userkins.comp:
forum.linuxcnc.org/10-advanced-configura...mill?start=30#258311
For an example of how to derive a kinematic see:
forum.linuxcnc.org/10-advanced-configura...mill?start=80#263694
The finished kinematic see:
github.com/LinuxCNC/linuxcnc/blob/master.../xyzab_tdr_kins.comp
To derive the forward and inverse kinematic model I would recommend using jupyter notebook and ipython. However, you need to be, or be prepared to make yourself, comfortable using matrices.
To make a serious effort to get this working I would not bother with the built in trt kinematics but would use the more recently added userkins.comp template and build a new kinematic from scratch.
Re userkins.comp:
forum.linuxcnc.org/10-advanced-configura...mill?start=30#258311
For an example of how to derive a kinematic see:
forum.linuxcnc.org/10-advanced-configura...mill?start=80#263694
The finished kinematic see:
github.com/LinuxCNC/linuxcnc/blob/master.../xyzab_tdr_kins.comp
To derive the forward and inverse kinematic model I would recommend using jupyter notebook and ipython. However, you need to be, or be prepared to make yourself, comfortable using matrices.
The following user(s) said Thank You: abdulasis12
Please Log in or Create an account to join the conversation.
- abdulasis12
- Offline
- Premium Member
-
Less
More
- Posts: 133
- Thank you received: 8
27 Dec 2024 11:18 - 27 Dec 2024 11:21 #317460
by abdulasis12
Replied by abdulasis12 on topic Skew correction/perpendicularity correction (millkins or millkins_xyz)
Hi
Thank you for fast reply.
Ok, I will try using the URLs you provided to study further. Maybe one day, I might be able to create it on my own.
Even though the chances are slim with my basic knowledge , I will give it a try.
The way you provided links for me to continue learning is really great I get to learn new things all the time.
Thank you so much for always helping me, from the first day I started using LinuxCNC until now (although I’ve stopped using Mint). It has been amazing!
forum.linuxcnc.org/9-installing-linuxcnc...ewbie?start=0#278679
Super Thanks Tommylight, RodW, and you Aciera.
second thanks : Online translator
Asis
Thank you for fast reply.
Ok, I will try using the URLs you provided to study further. Maybe one day, I might be able to create it on my own.
Even though the chances are slim with my basic knowledge , I will give it a try.
The way you provided links for me to continue learning is really great I get to learn new things all the time.
Thank you so much for always helping me, from the first day I started using LinuxCNC until now (although I’ve stopped using Mint). It has been amazing!
forum.linuxcnc.org/9-installing-linuxcnc...ewbie?start=0#278679
Super Thanks Tommylight, RodW, and you Aciera.
second thanks : Online translator
Asis
Last edit: 27 Dec 2024 11:21 by abdulasis12.
The following user(s) said Thank You: Aciera
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4718
- Thank you received: 2114
27 Dec 2024 13:06 - 27 Dec 2024 13:11 #317467
by Aciera
Replied by Aciera on topic Skew correction/perpendicularity correction (millkins or millkins_xyz)
For an easier start on how to use jupyter notebook and ipython to derive the kinematic linked above you can directly load the notebook used to create it and the documentation to study/modify:
github.com/Sigma1912/LinuxCNC_Demo_Confi...0Kinematics%20.ipynb
This contains all the python code blocks that handle the math.
github.com/Sigma1912/LinuxCNC_Demo_Confi...0Kinematics%20.ipynb
This contains all the python code blocks that handle the math.
Last edit: 27 Dec 2024 13:11 by Aciera.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4718
- Thank you received: 2114
27 Dec 2024 13:25 - 27 Dec 2024 13:30 #317469
by Aciera
Replied by Aciera on topic Skew correction/perpendicularity correction (millkins or millkins_xyz)
So my approach (which may be wrong though) would be to start end the kinematic chain with a matrix for the skew (also called 'shear') which has the form:
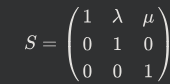
The inverse looks the same with the shear elements (ie lambda and mu) negative
The inverse looks the same with the shear elements (ie lambda and mu) negative
Attachments:
Last edit: 27 Dec 2024 13:30 by Aciera. Reason: changed my mind as to where the skew should be added.
The following user(s) said Thank You: abdulasis12
Please Log in or Create an account to join the conversation.
- Configuring LinuxCNC
- Basic Configuration
- Skew correction/perpendicularity correction (millkins or millkins_xyz)
Time to create page: 0.816 seconds