- Configuring LinuxCNC
- Advanced Configuration
- EtherCAT
- How to monitor OP mode in Panasonic A6B Ethercat
How to monitor OP mode in Panasonic A6B Ethercat
- marq_torque
-
 Topic Author
Topic Author
- Offline
- Elite Member
-

- Posts: 171
- Thank you received: 2
Thanks in advance.
Please Log in or Create an account to join the conversation.
- marq_torque
-
Topic Author
- Offline
- Elite Member
-
- Posts: 171
- Thank you received: 2
Now, do I need to invert "lcec.0.0.drivestatus-0" ? How it can be done?
Maybe try the 'NOT' component:
linuxcnc.org/docs/devel/html/man/man9/not.9.html
I think I already tried using "not" component, can you confirm this is right format?
"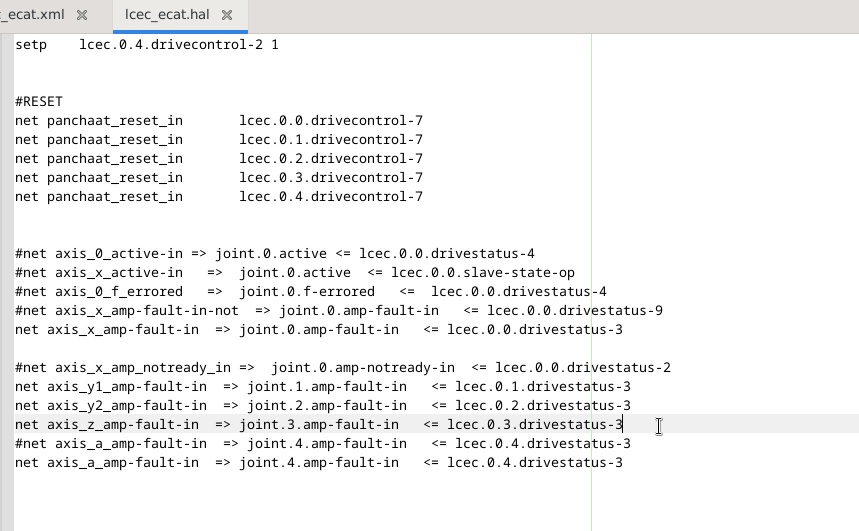
Attachments:
Please Log in or Create an account to join the conversation.
- endian
-

- Offline
- Platinum Member
-

- Posts: 336
- Thank you received: 132
Hello zmrdko,try running this in terminal:
watch -n 0.1 ethercat slaves however drives not getting to OP mode must have a reason. What hardware are you on? I have similar issue with RPI5 and generic driver. I tried faster servo threads, but developers told me, that generic driver is only good for 1 000 000 ns servo thread.
have you ever reinstalling drivers from default generic to other as e1000e or rtl8190too ? I did some questions about this problematic during early days of lcec at one of the first threads and guys told me that there is no much big difference between them...
but I should have calmer sleeping if there is right driver with the right hardware..
regards
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

- Posts: 4724
- Thank you received: 2117
I know nothing about EtherCAT, so I have no idea if you can get an inverted value back from the drive. What I suggested was using the built in HAL component called 'NOT'. For which you would need to use 'loadrt' and 'addf' commands and connect the input and output pins in hal.I think I already tried using "not" component, can you confirm this is right format?
Please Log in or Create an account to join the conversation.
- rodw
-

- Offline
- Platinum Member
-
- Posts: 11965
- Thank you received: 4078
You really should give Ethercat a try! Some Ethercat settings can have the direction altered by changing a SDO setting. But I doubt a status pin will.
I think I already tried using "not" component, can you confirm this is right format?
I know nothing about EtherCAT, so I have no idea if you can get an inverted value back from the drive. What I suggested was using the built in HAL component called 'NOT'. For which you would need to use 'loadrt' and 'addf' commands and connect the input and output pins in hal.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
- Posts: 4724
- Thank you received: 2117
It's not for lack of interest. Seems to be the way things are headed but I'm usually in need of all kinds of different digital/analog IO, encoder inputs and generally more unconventional setups. When you factor in support for such things MESA hardware is just really hard to beat.You really should give Ethercat a try!
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

- Posts: 21660
- Thank you received: 7400
I would, if someone is willing to go through hell of sending me an EtherCat drive that can handle a 3.5KW Siemens (or was it Indramat?) servo motor, for free!You really should give Ethercat a try!
")
Please Log in or Create an account to join the conversation.
- marq_torque
-
Topic Author
- Offline
- Elite Member
-
- Posts: 171
- Thank you received: 2
Can you pl share any relevant example? with "loadrt" and "addf" commands?
I think I already tried using "not" component, can you confirm this is right format?
I know nothing about EtherCAT, so I have no idea if you can get an inverted value back from the drive. What I suggested was using the built in HAL component called 'NOT'. For which you would need to use 'loadrt' and 'addf' commands and connect the input and output pins in hal.
You really should give Ethercat a try! Some Ethercat settings can have the direction altered by changing a SDO setting. But I doubt a status pin will.
Please Log in or Create an account to join the conversation.
- marq_torque
-
Topic Author
- Offline
- Elite Member
-
- Posts: 171
- Thank you received: 2
Can you educate me more about ssi and all? how to capture? Totally banging my head in wallYou can run it multiple times to find the servo drive that can OP every time. Use ethercat sii_read to read the sii data in it and compare it with the sii data in the drive that cannot OP to find the difference. The easiest way is to use ethercat sii_write to write the good sii data. It has been several months since I solved this problem and this problem has never appeared again.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
- Posts: 4724
- Thank you received: 2117
To load the realtime component (the name 'not.myexample' is arbitrary)
loadrt not names=not.myexampleFor the component to be executed in the servo-thread we need to add it.
Note: The order of how components are added to the thread matter. You will want this after the ethercat read and before the ethercat write. Otherwise you may loose a cycle before the state is valid.
addf not.myexample servo-threadThen you can connect the signals:
net some_signal_name <= hal_pin_to_be_inverted => not.myexample.innet some_other_signal_name <= not.myexample.out => some_hal_pinPlease Log in or Create an account to join the conversation.
- Configuring LinuxCNC
- Advanced Configuration
- EtherCAT
- How to monitor OP mode in Panasonic A6B Ethercat