Problems with Lichuan Ethercat servo drive
- LCR
- Offline
- Junior Member
-

Less
More
- Posts: 38
- Thank you received: 3
12 Feb 2025 00:20 - 13 Feb 2025 12:47 #321301
by LCR
Replied by LCR on topic Problems with Lichuan Ethercat servo drive
Actually we are using 7.3 Periodic synchronous position mode (CSP mode)
Last edit: 13 Feb 2025 12:47 by LCR.
Please Log in or Create an account to join the conversation.
- LCR
- Offline
- Junior Member
-
Less
More
- Posts: 38
- Thank you received: 3
13 Feb 2025 14:12 #321437
by LCR
Replied by LCR on topic Problems with Lichuan Ethercat servo drive
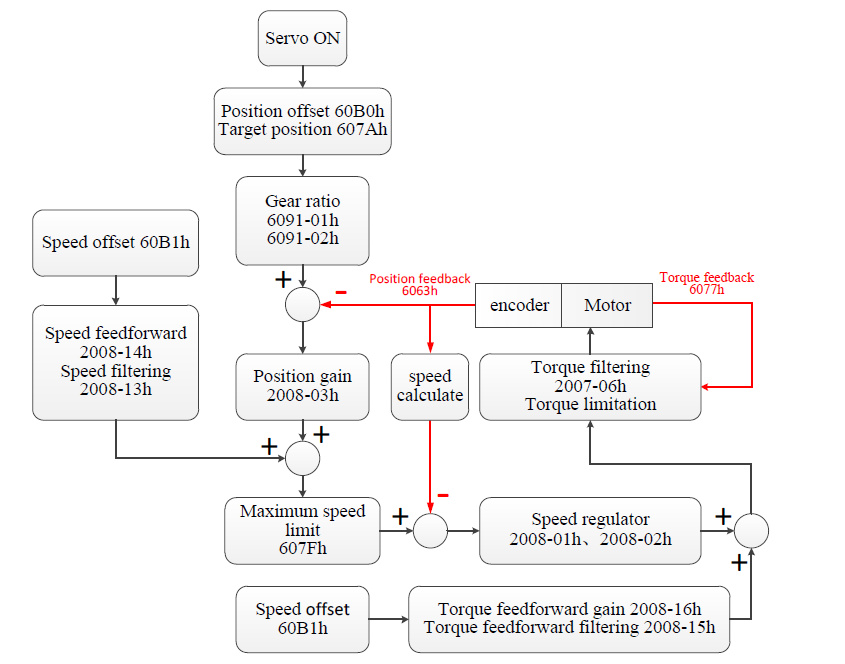
It looks like even in CSP mode, there is an option for Velocity Feed Forward. This is one of the biggest improvements a control loop can have. Has anyone tried this?
60B1h 00 Speed offset
60B1h 00 Speed offset
Attachments:
Please Log in or Create an account to join the conversation.
- LCR
- Offline
- Junior Member
-
Less
More
- Posts: 38
- Thank you received: 3
15 Feb 2025 14:04 - 15 Feb 2025 14:10 #321638
by LCR
Replied by LCR on topic Problems with Lichuan Ethercat servo drive
Please note this is not in anyway final. I just wanted to show how I am running and homing a gantry.
I would like to use the actual captured value of the index pulse, not just let LinuxCNC know that it's been hit, but at slow speeds it doesn't matter in my case.
I would like to use the actual captured value of the index pulse, not just let LinuxCNC know that it's been hit, but at slow speeds it doesn't matter in my case.
Attachments:
Last edit: 15 Feb 2025 14:10 by LCR.
The following user(s) said Thank You: COFHAL
Please Log in or Create an account to join the conversation.
- LCR
- Offline
- Junior Member
-
Less
More
- Posts: 38
- Thank you received: 3
15 Feb 2025 14:12 - 15 Feb 2025 14:14 #321640
by LCR
Replied by LCR on topic Problems with Lichuan Ethercat servo drive
more files
Attachments:
Last edit: 15 Feb 2025 14:14 by LCR.
The following user(s) said Thank You: COFHAL
Please Log in or Create an account to join the conversation.
- LCR
- Offline
- Junior Member
-
Less
More
- Posts: 38
- Thank you received: 3
18 Feb 2025 21:46 #321944
by LCR
Replied by LCR on topic Problems with Lichuan Ethercat servo drive
Copying the velocity FF command from the comp file to the XML file significantly reduces following error to a ramp. I haven't really tuned the drive yet. If anyone has found an auto-tune button, please let me know.
.comp
drv_target_velocity = (int32_t) (velocity_cmd * velo_scale);
.xml
<pdoEntry idx="60B1" subIdx="00" bitLen="32" halPin="target-velocity" halType="s32"/>
.comp
drv_target_velocity = (int32_t) (velocity_cmd * velo_scale);
.xml
<pdoEntry idx="60B1" subIdx="00" bitLen="32" halPin="target-velocity" halType="s32"/>
Please Log in or Create an account to join the conversation.
- Philip Lydin
- Offline
- Senior Member
-

Less
More
- Posts: 43
- Thank you received: 6
28 Feb 2025 16:09 - 28 Feb 2025 16:18 #322875
by Philip Lydin
Replied by Philip Lydin on topic Problems with Lichuan Ethercat servo drive
Why do i get that it cant find "cia402.0.probe1rising". Where does these pins get added? And in what directory should i have the .comp file?
Last edit: 28 Feb 2025 16:18 by Philip Lydin.
Please Log in or Create an account to join the conversation.
- LCR
- Offline
- Junior Member
-
Less
More
- Posts: 38
- Thank you received: 3
28 Feb 2025 16:38 #322876
by LCR
Replied by LCR on topic Problems with Lichuan Ethercat servo drive
It is in the hal file I attached in a previous message. Search for probe1rising. Please note that this is a work in progress (or lack there of for a couple of weeks). I just wanted to show my hack to get a gantry going. Download all the files and search them. Be aware of the LinuxCNC underscore dash translation that occurs between various files. That's why my naming is poorly readable.
Please Log in or Create an account to join the conversation.
- LCR
- Offline
- Junior Member
-
Less
More
- Posts: 38
- Thank you received: 3
28 Feb 2025 16:40 #322877
by LCR
Replied by LCR on topic Problems with Lichuan Ethercat servo drive
If you aren't trying to get a gantry going don't look at what I've posted, it will only set you back.
Please Log in or Create an account to join the conversation.
- jdowsonjr
- Offline
- New Member
-

Less
More
- Posts: 9
- Thank you received: 2
05 Mar 2025 14:25 #323270
by jdowsonjr
Replied by jdowsonjr on topic Problems with Lichuan Ethercat servo drive
LC-E series drives dont have an auto tune feature. Has anyone successfully tuned these drives even when only one motor is used per axis (not a gantry)? Considering if I buy a kit as well over Inovance or Leadshine
Please Log in or Create an account to join the conversation.
- ihavenofish
- Offline
- Platinum Member
-

Less
More
- Posts: 1022
- Thank you received: 285
05 Mar 2025 17:10 #323290
by ihavenofish
Replied by ihavenofish on topic Problems with Lichuan Ethercat servo drive
I'm still waiting to see these in proper functional use on a machine too.
These are very appealing to spec on my machine, but I want someone else to make sure it works first, hahaha.
These are very appealing to spec on my machine, but I want someone else to make sure it works first, hahaha.
Please Log in or Create an account to join the conversation.
Time to create page: 0.346 seconds