Search Results (Searched for: raspberry)
- kate
- kate
01 Nov 2025 11:08
Replied by kate on topic RaspberryPi 4/5 Ethercat Rtelligent ECT60 Synchronization error
RaspberryPi 4/5 Ethercat Rtelligent ECT60 Synchronization error
Category: EtherCAT
- Hakan
- Hakan
01 Nov 2025 10:57
Replied by Hakan on topic RaspberryPi 4/5 Ethercat Rtelligent ECT60 Synchronization error
RaspberryPi 4/5 Ethercat Rtelligent ECT60 Synchronization error
Category: EtherCAT
- kate
- kate
01 Nov 2025 10:24 - 01 Nov 2025 11:17
Replied by kate on topic RaspberryPi 4/5 Ethercat Rtelligent ECT60 Synchronization error
RaspberryPi 4/5 Ethercat Rtelligent ECT60 Synchronization error
Category: EtherCAT
- Will_cnc
- Will_cnc
31 Oct 2025 09:14
Replied by Will_cnc on topic Stepper online A6 Servo motor as Spindle motor
Stepper online A6 Servo motor as Spindle motor
Category: General LinuxCNC Questions
- kate
- kate
30 Oct 2025 20:22 - 31 Oct 2025 12:54
- Will_cnc
- Will_cnc
30 Oct 2025 19:38
Replied by Will_cnc on topic Stepper online A6 Servo motor as Spindle motor
Stepper online A6 Servo motor as Spindle motor
Category: General LinuxCNC Questions
- PCW

30 Oct 2025 19:11
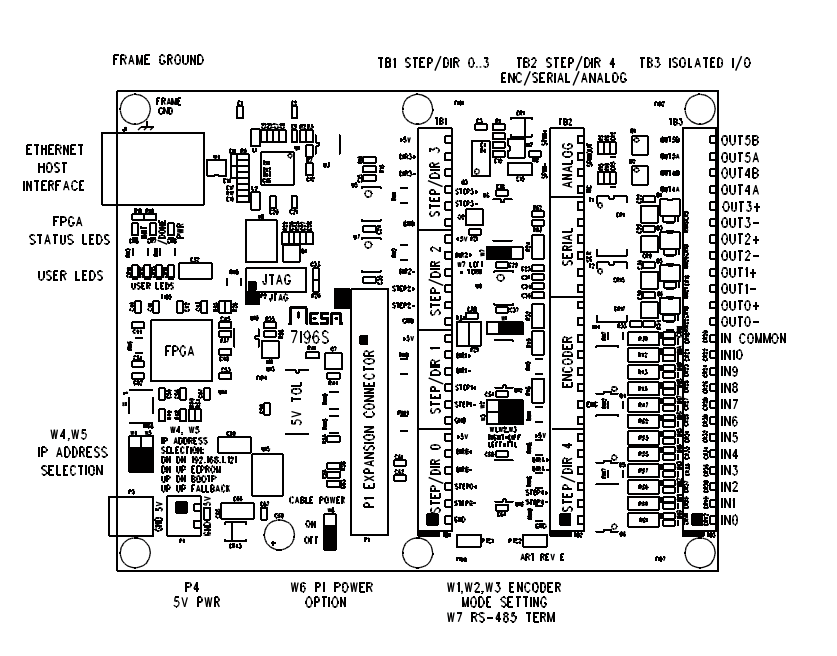
Replied by PCW on topic 7i96s Pinout/Wiring Help
7i96s Pinout/Wiring Help
Category: General LinuxCNC Questions
- maruf1777
- maruf1777
30 Oct 2025 18:39
7i96s Pinout/Wiring Help was created by maruf1777
7i96s Pinout/Wiring Help
Category: General LinuxCNC Questions
- Will_cnc
- Will_cnc
30 Oct 2025 11:00
Replied by Will_cnc on topic Stepper online A6 Servo motor as Spindle motor
Stepper online A6 Servo motor as Spindle motor
Category: General LinuxCNC Questions
- tommylight

30 Oct 2025 00:18
Replied by tommylight on topic Raspberry PI4/5 I2C support for non realtime IO/ADC/LCD
Raspberry PI4/5 I2C support for non realtime IO/ADC/LCD
Category: General LinuxCNC Questions
- nanowhat
- nanowhat
29 Oct 2025 04:28
Replied by nanowhat on topic Loading 32 bit shared library with GladeVCP/python on a Raspberry Pi
Loading 32 bit shared library with GladeVCP/python on a Raspberry Pi
Category: General LinuxCNC Questions
- nanowhat
- nanowhat
29 Oct 2025 02:27
- Chad
- Chad
26 Oct 2025 10:12
- unknown
- unknown
24 Oct 2025 06:41 - 24 Oct 2025 10:14
- eoverton
- eoverton
24 Oct 2025 05:18
Replied by eoverton on topic Remora with STM32H753ZI
Remora with STM32H753ZI
Category: Computers and Hardware
Time to create page: 0.641 seconds