Search Results (Searched for: )
- Aciera

Today 07:36 - Today 07:37
Replied by Aciera on topic Help Controller for a Lathe ?
Help Controller for a Lathe ?
Category: CNC Machines
- besriworld
- besriworld
Today 07:25
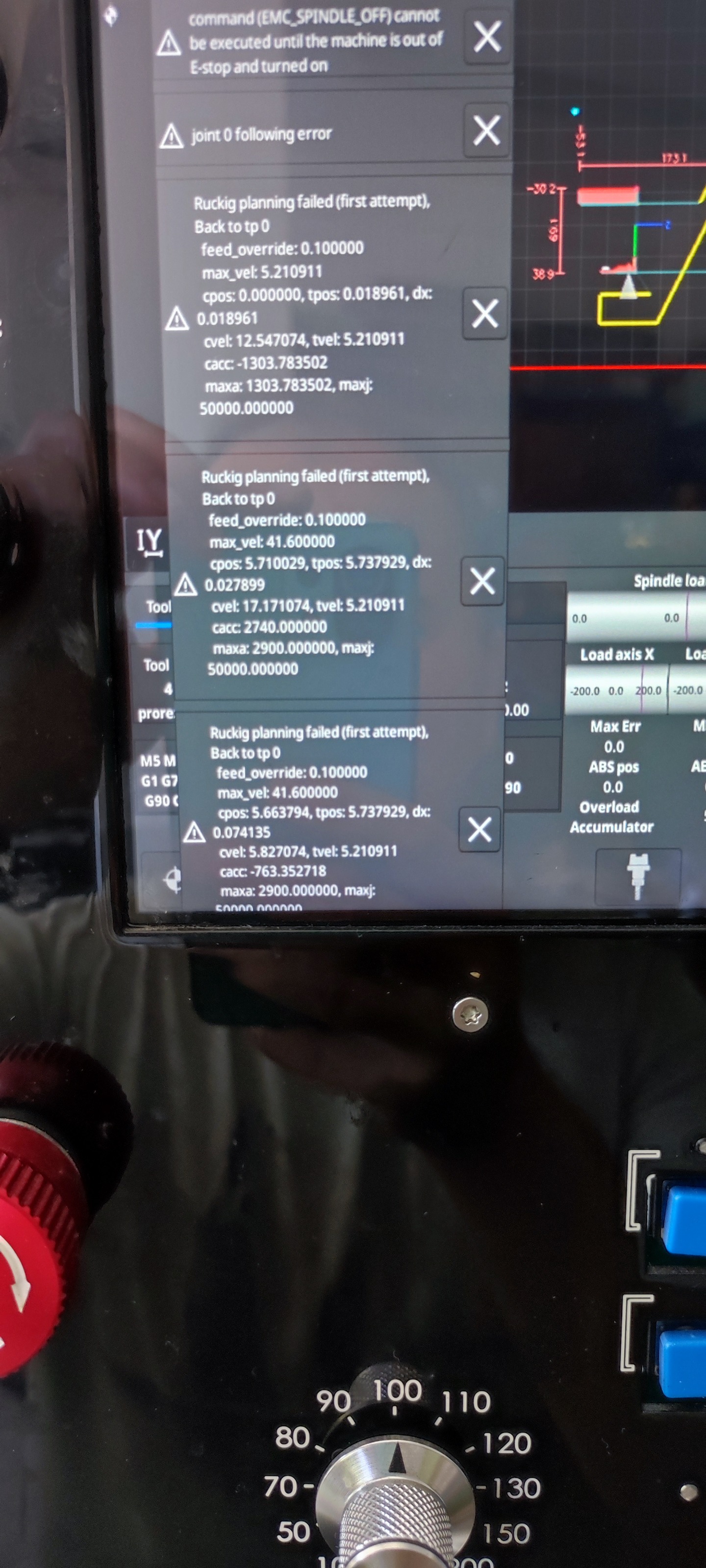
Replied by besriworld on topic LinuxCNC S-Curve Accelerations
LinuxCNC S-Curve Accelerations
Category: General LinuxCNC Questions
- Aciera
Today 07:19 - Today 07:27
Replied by Aciera on topic PUMA 200 Robotarm and some Hal/INI issues
PUMA 200 Robotarm and some Hal/INI issues
Category: Advanced Configuration
- meister
- meister
Today 06:45
Replied by meister on topic Steuerung für Drehmaschine?
Steuerung für Drehmaschine?
Category: Deutsch
- bmoo
- bmoo
Yesterday 02:37
Replied by bmoo on topic Help wiring G0704 Spindle to Mesa 7i96s
Help wiring G0704 Spindle to Mesa 7i96s
Category: Milling Machines
- leexi
- leexi
Yesterday 01:31 - Yesterday 02:07
Replied by leexi on topic Chinise mesa clone vs Original vs Ethercat
Chinise mesa clone vs Original vs Ethercat
Category: Driver Boards
- Holzwurm56
- Holzwurm56
Yesterday 22:20
Replied by Holzwurm56 on topic Help Controller for a Lathe ?
Help Controller for a Lathe ?
Category: CNC Machines
- andypugh

Yesterday 22:09
Replied by andypugh on topic Help Controller for a Lathe ?
Help Controller for a Lathe ?
Category: CNC Machines
- andypugh
Yesterday 21:55
Replied by andypugh on topic Refreshing the LCNC visual documentation, an attempt, feedback welcome
Refreshing the LCNC visual documentation, an attempt, feedback welcome
Category: EtherCAT
- hitchhiker
- hitchhiker
Yesterday 21:31
Replied by hitchhiker on topic PUMA 200 Robotarm and some Hal/INI issues
PUMA 200 Robotarm and some Hal/INI issues
Category: Advanced Configuration
- Aciera
Yesterday 20:02 - Yesterday 20:15
Replied by Aciera on topic PUMA 200 Robotarm and some Hal/INI issues
PUMA 200 Robotarm and some Hal/INI issues
Category: Advanced Configuration
- Zia
- Zia
Yesterday 19:43
- Routerworks
- Routerworks
Yesterday 19:11
- hitchhiker
- hitchhiker
Yesterday 18:38
Replied by hitchhiker on topic PUMA 200 Robotarm and some Hal/INI issues
PUMA 200 Robotarm and some Hal/INI issues
Category: Advanced Configuration
- tuxcnc
- tuxcnc
Yesterday 18:09
Time to create page: 1.813 seconds