Search Results (Searched for: )
- ziggi
16 Jul 2025 10:41 - 16 Jul 2025 10:42
Replied by ziggi on topic Troubles to get started with SD240 Retrofit
Troubles to get started with SD240 Retrofit
Category: Turning
- meister
- meister
16 Jul 2025 10:26
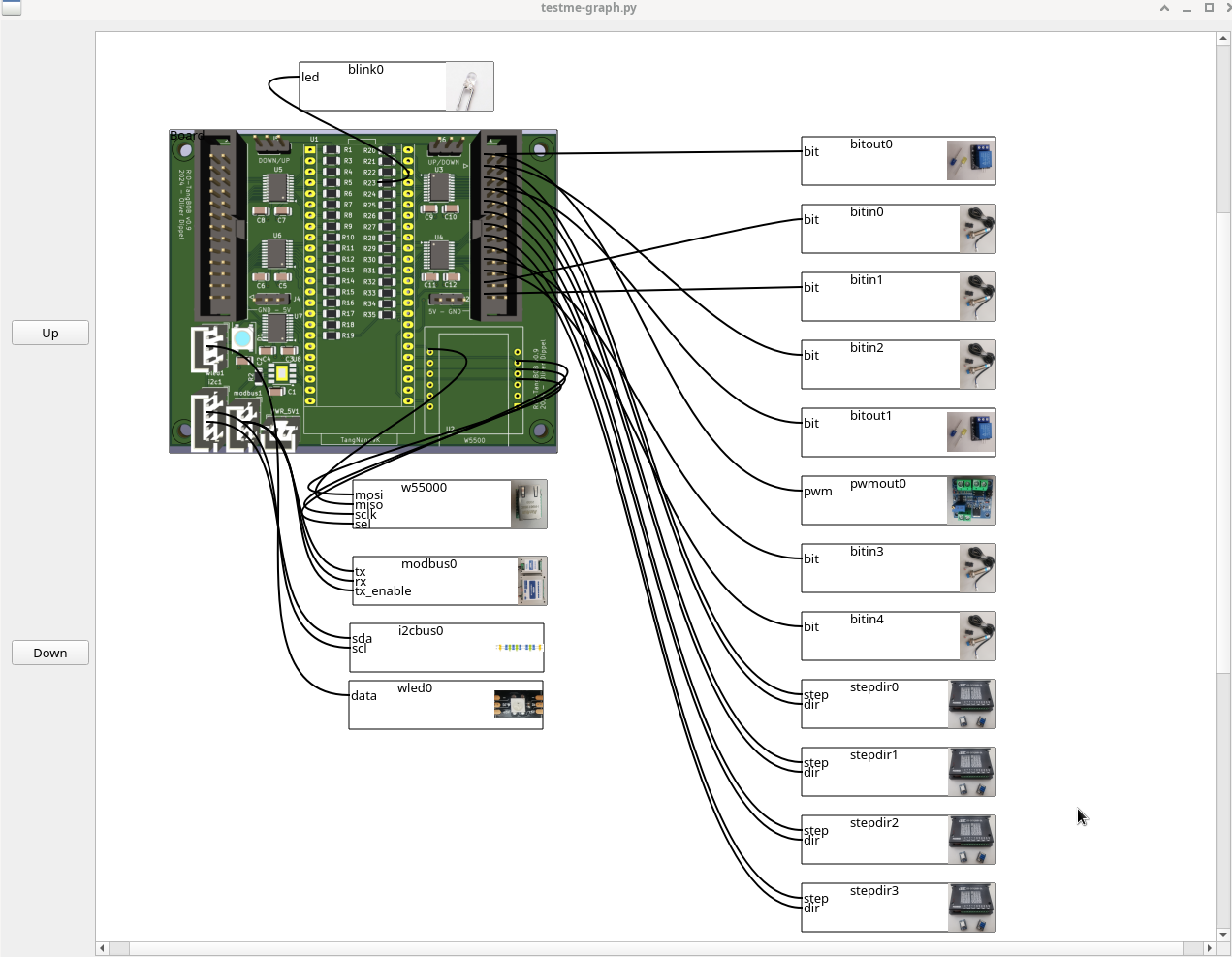
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- tommylight

16 Jul 2025 08:46 - 16 Jul 2025 08:48
Replied by tommylight on topic Mesa Auswahl für größeres Projekt
Mesa Auswahl für größeres Projekt
Category: Deutsch
- Hakan
- Hakan
16 Jul 2025 07:49
Replied by Hakan on topic PID tuning when you have a tuned Servo in CSP mode?
PID tuning when you have a tuned Servo in CSP mode?
Category: EtherCAT
- Hakan
- Hakan
16 Jul 2025 07:38
Replied by Hakan on topic PID tuning when you have a tuned Servo in CSP mode?
PID tuning when you have a tuned Servo in CSP mode?
Category: EtherCAT
- Hakan
- Hakan
16 Jul 2025 07:29
Replied by Hakan on topic How to use Fixed PDO mapping on Lichuan LC Servo
How to use Fixed PDO mapping on Lichuan LC Servo
Category: EtherCAT
- G0G53Z148

16 Jul 2025 06:53
Replied by G0G53Z148 on topic Mesa Auswahl für größeres Projekt
Mesa Auswahl für größeres Projekt
Category: Deutsch
- SebastianM
- SebastianM
16 Jul 2025 03:58
Replied by SebastianM on topic ATC Tool Rack implementation gesucht
ATC Tool Rack implementation gesucht
Category: Deutsch
- GeramyL
- GeramyL
16 Jul 2025 01:56
- Lcvette

16 Jul 2025 01:11 - 16 Jul 2025 01:12
Replied by Lcvette on topic probe basic ,manual tool change and tool setter question
probe basic ,manual tool change and tool setter question
Category: QtPyVCP
- PCW

16 Jul 2025 01:00
- unknown
- unknown
16 Jul 2025 00:54
- unknown
- unknown
16 Jul 2025 00:46
Replied by unknown on topic Graphical glitches with Raspberry Pi 400 + LinuxCNC 2.9.4 (arm64)
Graphical glitches with Raspberry Pi 400 + LinuxCNC 2.9.4 (arm64)
Category: Installing LinuxCNC
- tar_san
- tar_san
16 Jul 2025 00:38
How to use Fixed PDO mapping on Lichuan LC Servo was created by tar_san
How to use Fixed PDO mapping on Lichuan LC Servo
Category: EtherCAT
- PCW
16 Jul 2025 00:24
Replied by PCW on topic Trouble with LinuxCNC and Gantry stepper motor setup.
Trouble with LinuxCNC and Gantry stepper motor setup.
Category: Computers and Hardware
Time to create page: 0.786 seconds