Search Results (Searched for: )
- dunnitagain
- dunnitagain
11 Jun 2025 00:45
Replied by dunnitagain on topic Linuxcnc 2.4.5 with Ubuntu 10.04 , Terminated with Error!
Linuxcnc 2.4.5 with Ubuntu 10.04 , Terminated with Error!
Category: General LinuxCNC Questions
- dunnitagain
- dunnitagain
11 Jun 2025 00:43
Replied by dunnitagain on topic Linuxcnc 2.4.5 with Ubuntu 10.04 , Terminated with Error!
Linuxcnc 2.4.5 with Ubuntu 10.04 , Terminated with Error!
Category: General LinuxCNC Questions
- FixItWithMonkeyWrench
- FixItWithMonkeyWrench
11 Jun 2025 00:08
Latency Issues - Histogram Shape was created by FixItWithMonkeyWrench
Latency Issues - Histogram Shape
Category: Installing LinuxCNC
- unknown
- unknown
10 Jun 2025 23:38
Replied by unknown on topic Flyback diode mesa 7i95t
Flyback diode mesa 7i95t
Category: Driver Boards
- unknown
- unknown
10 Jun 2025 23:32
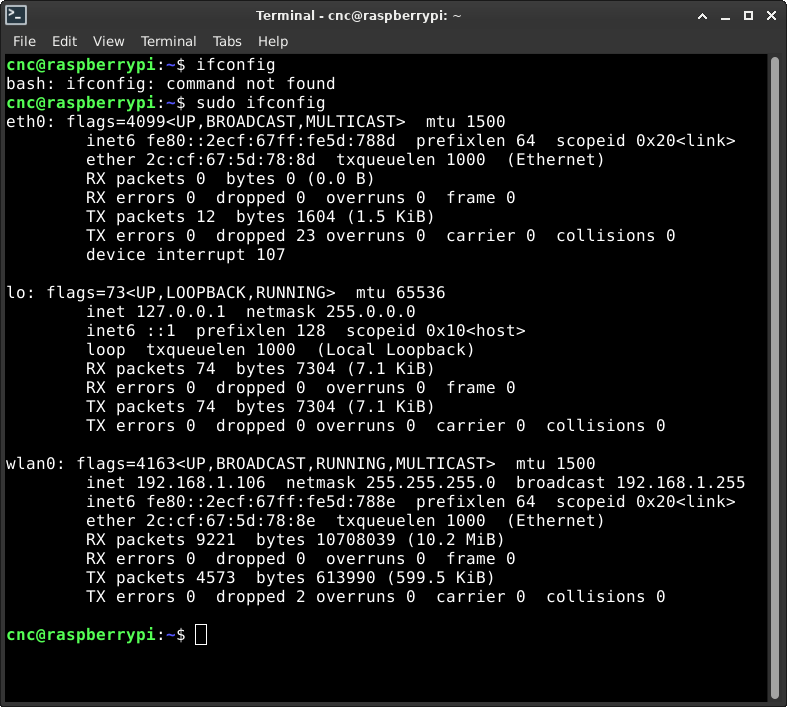
Replied by unknown on topic Raspberry Pi Kernel recompile for waveshare 1Gbit Network interface
Raspberry Pi Kernel recompile for waveshare 1Gbit Network interface
Category: Computers and Hardware
- PCW

10 Jun 2025 22:46
Replied by PCW on topic LinuxCNC will not start... report file crated
LinuxCNC will not start... report file crated
Category: General LinuxCNC Questions
- mediocre_chloride

10 Jun 2025 22:43 - 10 Jun 2025 22:44
Replied by mediocre_chloride on topic Raspberry Pi Kernel recompile for waveshare 1Gbit Network interface
Raspberry Pi Kernel recompile for waveshare 1Gbit Network interface
Category: Computers and Hardware

- jlfauvel

10 Jun 2025 22:26
Replied by jlfauvel on topic LinuxCNC will not start... report file crated
LinuxCNC will not start... report file crated
Category: General LinuxCNC Questions
- Benb

10 Jun 2025 22:14
Request for adding second led to existing hal push button was created by Benb
Request for adding second led to existing hal push button
Category: Qtvcp

- russkinch
10 Jun 2025 21:13
- unknown
- unknown
10 Jun 2025 20:59
Replied by unknown on topic Raspberry Pi Kernel recompile for waveshare 1Gbit Network interface
Raspberry Pi Kernel recompile for waveshare 1Gbit Network interface
Category: Computers and Hardware
- bobwolf
- bobwolf
10 Jun 2025 20:21
Another "arduino io panel" was created by bobwolf
Another "arduino io panel"
Category: Show Your Stuff
- PCW
10 Jun 2025 19:42
Replied by PCW on topic LinuxCNC will not start... report file crated
LinuxCNC will not start... report file crated
Category: General LinuxCNC Questions
- deltafox24
- deltafox24
10 Jun 2025 18:44
- jlfauvel
10 Jun 2025 18:11
Replied by jlfauvel on topic LinuxCNC ne démarre pas... message d'erreur
LinuxCNC ne démarre pas... message d'erreur
Category: Français
Time to create page: 1.132 seconds