Search Results (Searched for: )
- zz912

09 May 2025 19:29
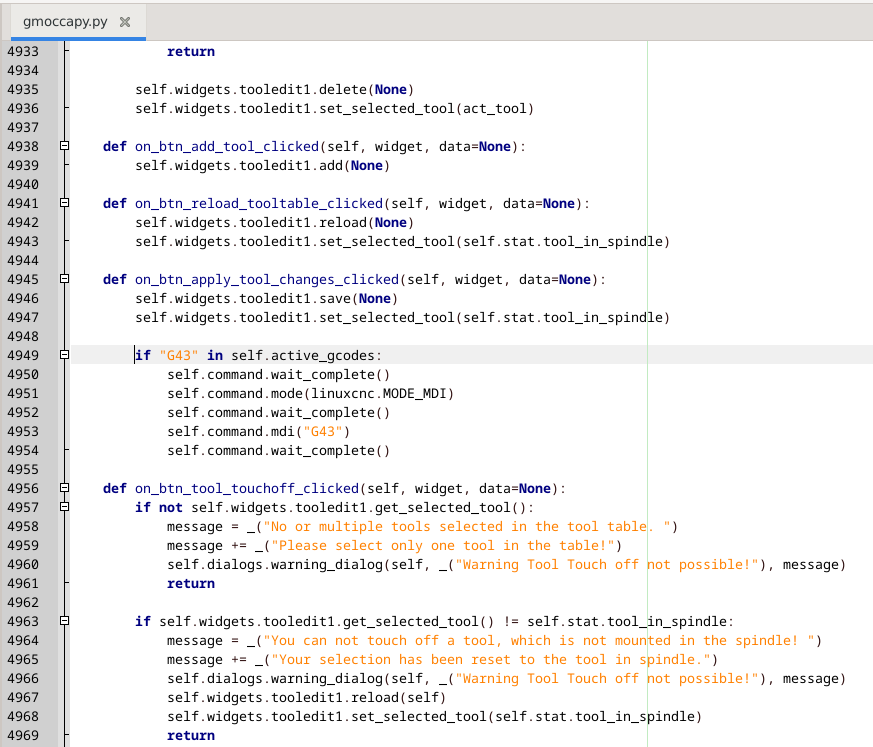
Replied by zz912 on topic Change Tool Offsets after editing the Tool Table
Change Tool Offsets after editing the Tool Table
Category: Gmoccapy
- DarkPhoinix
- DarkPhoinix
09 May 2025 19:19
Replied by DarkPhoinix on topic Which kernel version is best for real time?
Which kernel version is best for real time?
Category: General LinuxCNC Questions
- zz912
09 May 2025 19:10 - 09 May 2025 20:03
- PCW

09 May 2025 18:51
Replied by PCW on topic Real Time and Latency
Real Time and Latency
Category: Computers and Hardware
- amanker
- amanker
09 May 2025 18:44
Replied by amanker on topic Remora - Rpi Software Stepping Using External Microcontroller via SPI
Remora - Rpi Software Stepping Using External Microcontroller via SPI
Category: Computers and Hardware
- ogogon

09 May 2025 18:27 - 09 May 2025 18:35
Replied by ogogon on topic Real Time and Latency
Real Time and Latency
Category: Computers and Hardware
- DarkPhoinix
- DarkPhoinix
09 May 2025 18:10
Replied by DarkPhoinix on topic Best new Hardware for linuxcnc
Best new Hardware for linuxcnc
Category: Computers and Hardware
- unknown
- unknown
09 May 2025 17:54
Replied by unknown on topic Best new Hardware for linuxcnc
Best new Hardware for linuxcnc
Category: Computers and Hardware
- PCW
09 May 2025 17:50
Replied by PCW on topic Ethercat LinuxCNC board for a 4 axis router
Ethercat LinuxCNC board for a 4 axis router
Category: General LinuxCNC Questions
- unknown
- unknown
09 May 2025 17:50
Replied by unknown on topic Which kernel version is best for real time?
Which kernel version is best for real time?
Category: General LinuxCNC Questions
- tiagounderground
- tiagounderground
09 May 2025 17:23
Replied by tiagounderground on topic LinuxCNC S-Curve Accelerations
LinuxCNC S-Curve Accelerations
Category: General LinuxCNC Questions
- SanzuiWorks

09 May 2025 17:01 - 13 May 2025 06:53
Replied by SanzuiWorks on topic Manual Toolchange + Abs Z Probe (QtDragon)
Manual Toolchange + Abs Z Probe (QtDragon)
Category: Qtvcp
- aeth
- aeth
09 May 2025 16:41
Replied by aeth on topic Ethercat LinuxCNC board for a 4 axis router
Ethercat LinuxCNC board for a 4 axis router
Category: General LinuxCNC Questions
- aeth
- aeth
09 May 2025 16:33
Replied by aeth on topic Ethercat LinuxCNC board for a 4 axis router
Ethercat LinuxCNC board for a 4 axis router
Category: General LinuxCNC Questions
- PCW
09 May 2025 16:07
Replied by PCW on topic Ethercat LinuxCNC board for a 4 axis router
Ethercat LinuxCNC board for a 4 axis router
Category: General LinuxCNC Questions
Time to create page: 0.454 seconds