Search Results (Searched for: )
- ihavenofish
- ihavenofish
03 Feb 2025 20:24
Replied by ihavenofish on topic New ethercat / probe basic control for minimonster
New ethercat / probe basic control for minimonster
Category: CNC Machines
- RNJFAB
- RNJFAB
03 Feb 2025 20:24
Replied by RNJFAB on topic Homemade CNC Plasma - hypertherm, Mesa, gear drives, nema 34.
Homemade CNC Plasma - hypertherm, Mesa, gear drives, nema 34.
Category: Show Your Stuff
- tommylight

03 Feb 2025 20:11
Replied by tommylight on topic The dumification of humanity through internet
The dumification of humanity through internet
Category: Off Topic and Test Posts
")
- Aciera

03 Feb 2025 20:08
Replied by Aciera on topic Program exceeds machine maximum X and Y Axis
Program exceeds machine maximum X and Y Axis
Category: General LinuxCNC Questions
- Hakan
- Hakan
03 Feb 2025 20:04
Replied by Hakan on topic lcec config exited without becoming ready
lcec config exited without becoming ready
Category: EtherCAT
- BigDee
- BigDee
03 Feb 2025 20:00 - 03 Feb 2025 20:02
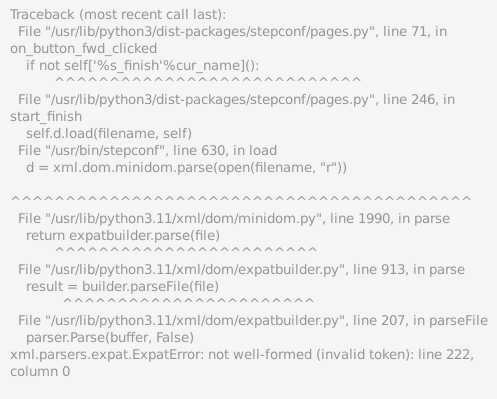
Edit config file from 2.9.3 in stepconf 2.9.4 was created by BigDee
Edit config file from 2.9.3 in stepconf 2.9.4
Category: Installing LinuxCNC
- tommylight
03 Feb 2025 19:58
Replied by tommylight on topic Installing NoMachine Remote Desktop - Package installer issues
Installing NoMachine Remote Desktop - Package installer issues
Category: Computers and Hardware
- my1987toyota

03 Feb 2025 19:46 - 03 Feb 2025 19:54
Replied by my1987toyota on topic The dumification of humanity through internet
The dumification of humanity through internet
Category: Off Topic and Test Posts
- Aciera
03 Feb 2025 19:44 - 03 Feb 2025 19:45
Replied by Aciera on topic Program exceeds machine maximum X and Y Axis
Program exceeds machine maximum X and Y Axis
Category: General LinuxCNC Questions
- Aciera
03 Feb 2025 19:40 - 03 Feb 2025 19:42
Replied by Aciera on topic Program exceeds machine maximum X and Y Axis
Program exceeds machine maximum X and Y Axis
Category: General LinuxCNC Questions
- ihavenofish
- ihavenofish
03 Feb 2025 19:39
New ethercat / probe basic control for minimonster was created by ihavenofish
New ethercat / probe basic control for minimonster
Category: CNC Machines
- spumco
- spumco
03 Feb 2025 19:38
Replied by spumco on topic Remap M6 Prolog & Epilog question
Remap M6 Prolog & Epilog question
Category: Advanced Configuration
- spumco
- spumco
03 Feb 2025 19:30 - 03 Feb 2025 19:35
Replied by spumco on topic Remap M6 Prolog & Epilog question
Remap M6 Prolog & Epilog question
Category: Advanced Configuration
- Sziggy_NC
- Sziggy_NC
03 Feb 2025 18:37
Remap M6 Prolog & Epilog question was created by Sziggy_NC
Remap M6 Prolog & Epilog question
Category: Advanced Configuration
- PCW

03 Feb 2025 18:08 - 03 Feb 2025 18:18
Time to create page: 0.416 seconds