Search Results (Searched for: )
- papagno-source
- papagno-source
25 Dec 2024 17:29
- gblcody

25 Dec 2024 15:39
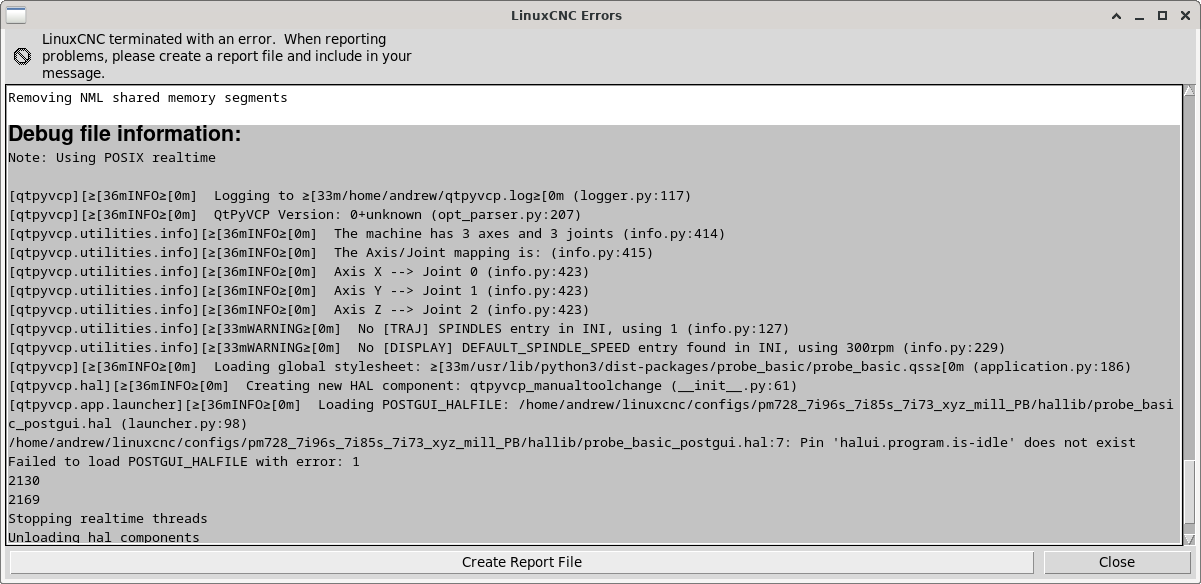
Replied by gblcody on topic Probe basic Install errors
Probe basic Install errors
Category: Basic Configuration
- abdulasis12
- abdulasis12
25 Dec 2024 15:31 - 25 Dec 2024 15:33
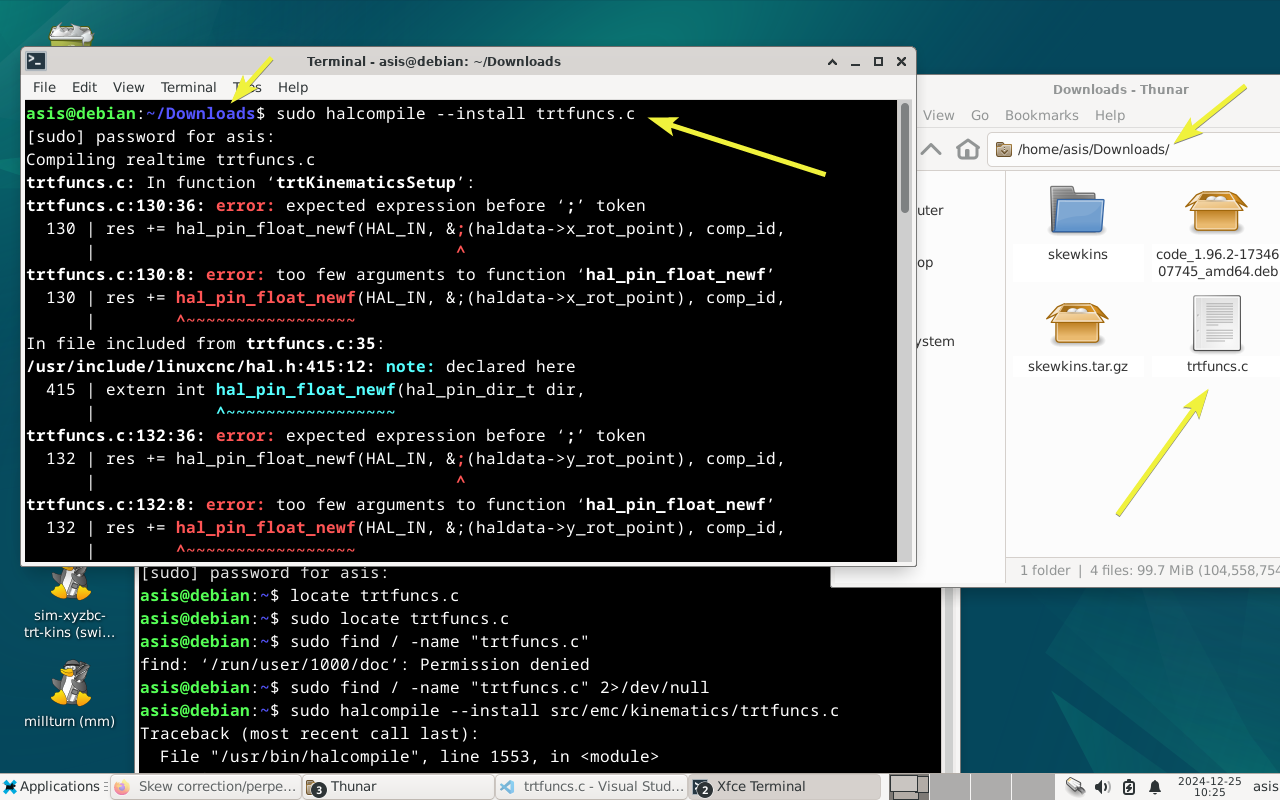
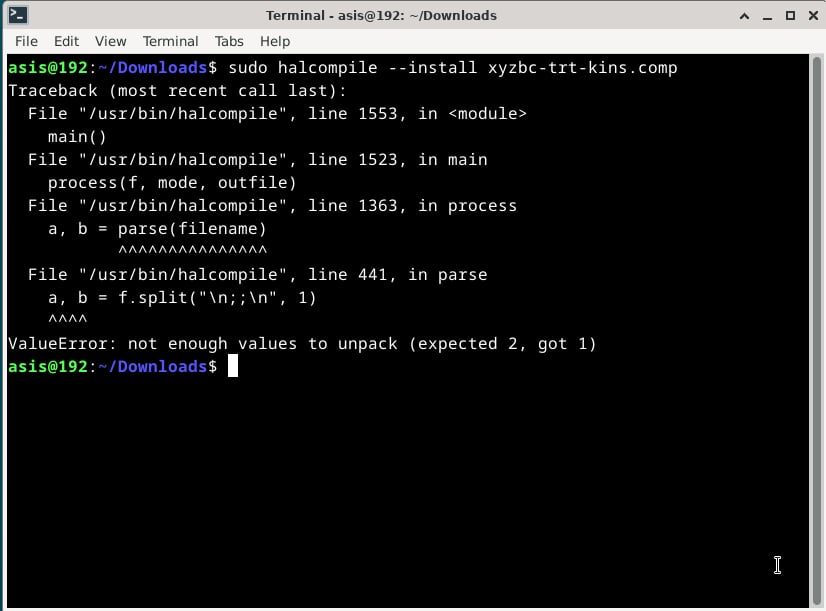
Replied by abdulasis12 on topic Skew correction/perpendicularity correction (millkins or millkins_xyz)
Skew correction/perpendicularity correction (millkins or millkins_xyz)
Category: Basic Configuration
- PCW

25 Dec 2024 14:52
- beauxnez
- beauxnez
25 Dec 2024 14:33 - 25 Dec 2024 14:54
- Lcvette

25 Dec 2024 13:07
Replied by Lcvette on topic Probe Basic M6G43 (m6_tool_call_tool_page) not working
Probe Basic M6G43 (m6_tool_call_tool_page) not working
Category: QtPyVCP
- Lcvette
25 Dec 2024 13:05
Replied by Lcvette on topic To Probe Basic from Gmoccapy
To Probe Basic from Gmoccapy
Category: QtPyVCP
- Lcvette
25 Dec 2024 13:03
Replied by Lcvette on topic To Probe Basic from Gmoccapy
To Probe Basic from Gmoccapy
Category: QtPyVCP
- lukin1156
- lukin1156
25 Dec 2024 12:55
- Aciera

25 Dec 2024 12:24 - 25 Dec 2024 12:27
- ihavenofish
- ihavenofish
25 Dec 2024 11:58
Replied by ihavenofish on topic PathPilot V2 source code
PathPilot V2 source code
Category: PathPilot
- abdulasis12
- abdulasis12
25 Dec 2024 11:51 - 25 Dec 2024 11:58
Replied by abdulasis12 on topic Skew correction/perpendicularity correction (millkins or millkins_xyz)
Skew correction/perpendicularity correction (millkins or millkins_xyz)
Category: Basic Configuration
- Hakan
- Hakan
25 Dec 2024 11:41 - 25 Dec 2024 12:29
- papagno-source
- papagno-source
25 Dec 2024 11:29
- aikiaviator
- aikiaviator
25 Dec 2024 11:29
Replied by aikiaviator on topic To Probe Basic from Gmoccapy
To Probe Basic from Gmoccapy
Category: QtPyVCP
Time to create page: 0.479 seconds