dear PCW
On May 7, 2023, I started a thread about purchasing a suitable PC.
There was no final solution in the thread, but I had the impression that the PC mentioned in the thread at the time, which I installed in my CNC control cabinet today, could most likely be suitable for Linux CNC
forum.linuxcnc.org/42-deutsch/49043-neue...aesmaschine?start=10
At that time I even did the following test which was promising
forum.linuxcnc.org/18-computer/38838-har...ts-used-pc-s?start=0
Based on the thread, I interpreted that I shouldn't use a new Lenovo ThinkCentre PC for LinuxCNC right away, but rather a slightly older one, which I took to heart and implemented.
I can only post the system section from back then here below. The PC that now runs LinuxCNC had in May 2023 Linux Mint 20.3 installed at the time.
Now having the idea that I don't have the right PC installed really reduces my enthusiasm.
Who can tell me which PC is suitable? I don't think anyone?
The question about power management is currently open in this thread on page 3, could you please tell me where in the BIOS power management (please see the 3 pictures) should I make settings in the BIOS?
System: Kernel: 5.15.0-71-generic x86_64 bits: 64 compiler: N/A Desktop: Cinnamon 5.2.7
wm: muffin dm: LightDM Distro: Linux Mint 20.3 Una base: Ubuntu 20.04 focal
Machine: Type: Mini-pc System: ASUSTeK product: MINIPC PN50-E1 v: 0405 serial: <filter>
Mobo: ASUSTeK model: PN50-E1 serial: <filter> UEFI: ASUSTeK v: 0405 date: 03/18/2021
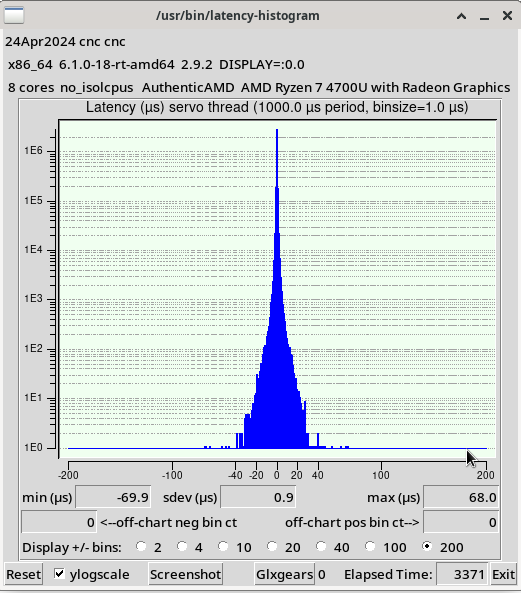
CPU: Topology: 8-Core model: AMD Ryzen 7 4700U with Radeon Graphics bits: 64 type: MCP
arch: Zen rev: 1 L2 cache: 4096 KiB
flags: avx avx2 lm nx pae sse sse2 sse3 sse4_1 sse4_2 sse4a ssse3 svm bogomips: 31939
Speed: 1857 MHz min/max: 1400/2000 MHz Core speeds (MHz): 1: 1860 2: 1857 3: 1862
4: 4184 5: 1281 6: 1484 7: 1396 8: 1475
Graphics: Device-1: AMD Renoir vendor: ASUSTeK driver: amdgpu v: kernel bus ID: 05:00.0
chip ID: 1002:1636
Display: x11 server: X.Org 1.20.13 driver: amdgpu,ati unloaded: fbdev,modesetting,vesa
resolution: 2560x1440~60Hz
OpenGL: renderer: AMD Radeon Graphics v: 4.6.14736 Core Profile Context
compat-v: 4.6.14736 direct render: Yes
Audio: Device-1: AMD driver: snd_hda_intel v: kernel bus ID: 05:00.1 chip ID: 1002:1637
Device-2: AMD Raven/Raven2/FireFlight/Renoir Audio Processor driver: N/A
bus ID: 05:00.5 chip ID: 1022:15e2
Device-3: AMD Family 17h HD Audio vendor: ASUSTeK driver: snd_hda_intel v: kernel
bus ID: 05:00.6 chip ID: 1022:15e3
Sound Server: ALSA v: k5.15.0-71-generic
Network: Device-1: Realtek RTL8125 2.5GbE vendor: ASUSTeK driver: r8169 v: kernel port: f000
bus ID: 02:00.0 chip ID: 10ec:8125
IF: enp2s0 state: up speed: 1000 Mbps duplex: full mac: <filter>
Device-2: Intel Wireless 8265 / 8275 driver: iwlwifi v: kernel port: f000
bus ID: 03:00.0 chip ID: 8086:24fd
IF: wlp3s0 state: down mac: <filter>
Drives: Local Storage: total: 465.76 GiB used: 411.29 GiB (88.3%)
ID-1: /dev/nvme0n1 vendor: Western Digital model: WDS500G2B0C-00PXH0 size: 465.76 GiB
speed: 31.6 Gb/s lanes: 4 serial: <filter>
Partition: ID-1: / size: 456.89 GiB used: 411.28 GiB (90.0%) fs: ext4 dev: /dev/nvme0n1p2
USB: Hub: 1-0:1 info: Full speed (or root) Hub ports: 2 rev: 2.0 chip ID: 1d6b:0002
Hub: 2-0:1 info: Full speed (or root) Hub ports: 2 rev: 3.0 chip ID: 1d6b:0003
Hub: 3-0:1 info: Full speed (or root) Hub ports: 4 rev: 2.0 chip ID: 1d6b:0002
Hub: 3-2:2 info: Apple Hub in Aluminum Keyboard ports: 3 rev: 2.0 chip ID: 05ac:1006
Device-1: 3-2.2:4 info: Apple Aluminium Keyboard (ISO) type: Keyboard,HID
driver: apple,usbhid rev: 2.0 chip ID: 05ac:0250
Device-2: 3-4:3 info: Realtek RTS5129 Card Reader Controller type: <vendor specific>
driver: rtsx_usb,rtsx_usb_ms,rtsx_usb_sdmmc rev: 2.0 chip ID: 0bda:0129
Hub: 4-0:1 info: Full speed (or root) Hub ports: 2 rev: 3.1 chip ID: 1d6b:0003
Hub: 5-0:1 info: Full speed (or root) Hub ports: 4 rev: 2.0 chip ID: 1d6b:0002
Device-3: 5-2:2 info: Logitech G203 Gaming Mouse type: Mouse,HID
driver: hid-generic,usbhid rev: 2.0 chip ID: 046d:c084
Device-4: 5-3:3 info: Intel type: Bluetooth driver: btusb rev: 2.0 chip ID: 8087:0a2b
Hub: 6-0:1 info: Full speed (or root) Hub ports: 2 rev: 3.1 chip ID: 1d6b:0003
Sensors: Message: No sensors data was found. Is sensors configured?
Repos: No active apt repos in: /etc/apt/sources.list
Active apt repos in: /etc/apt/sources.list.d/amdgpu-pro-local.list
1: deb [ trusted=yes ] file: /var/opt/amdgpu-pro-local/ ./
Active apt repos in: /etc/apt/sources.list.d/brave-browser-release.list
1: deb [signed-by=/usr/share/keyrings/brave-browser-archive-keyring.gpg arch=amd64] https: //brave-browser-apt-release.s3.brave.com/ stable main
Active apt repos in: /etc/apt/sources.list.d/official-package-repositories.list
1: deb http: //packages.linuxmint.com una main upstream import backport #id:linuxmint_main
2: deb http: //archive.ubuntu.com/ubuntu focal main restricted universe multiverse
3: deb http: //archive.ubuntu.com/ubuntu focal-updates main restricted universe multiverse
4: deb http: //archive.ubuntu.com/ubuntu focal-backports main restricted universe multiverse
5: deb http: //security.ubuntu.com/ubuntu/ focal-security main restricted universe multiverse
6: deb http: //archive.canonical.com/ubuntu/ focal partner
Active apt repos in: /etc/apt/sources.list.d/openproject.list
1: deb https: //dl.packager.io/srv/deb/opf/openproject/stable/12/ubuntu 18.04 main
Active apt repos in: /etc/apt/sources.list.d/opera-stable.list
1: deb https: //deb.opera.com/opera-stable/ stable non-free #Opera Browser (final releases)
Active apt repos in: /etc/apt/sources.list.d/vivaldi.list
1: deb [arch=amd64] https: //repo.vivaldi.com/stable/deb/ stable main
Info: Processes: 290 Uptime: 11h 01m Memory: 30.78 GiB used: 4.13 GiB (13.4%) Init: systemd
v: 245 runlevel: 5 Compilers: gcc: 9.4.0 alt: 8/9 Client: Unknown python3.8 client
inxi: 3.0.38




")