Search Results (Searched for: )
- Chris54636
- Chris54636
17 Feb 2025 14:51
- Grotius

17 Feb 2025 14:33
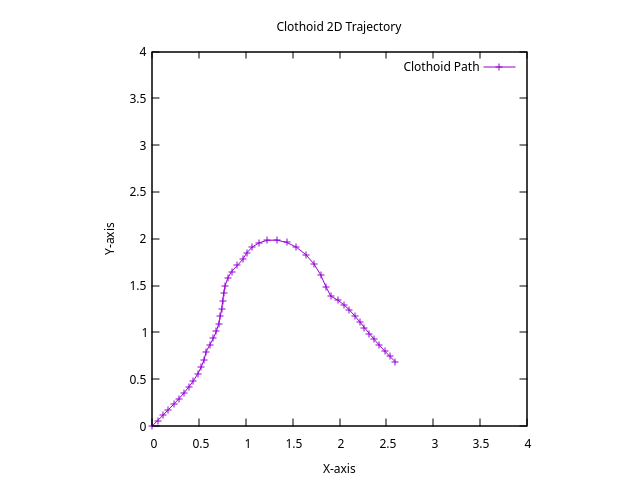
Replied by Grotius on topic scurve trajectory planner
scurve trajectory planner
Category: General LinuxCNC Questions

- kor
- kor
17 Feb 2025 14:14 - 17 Feb 2025 14:16
Replied by kor on topic Mesa with Ethercad connection
Mesa with Ethercad connection
Category: Driver Boards
- royka
- royka
17 Feb 2025 14:08
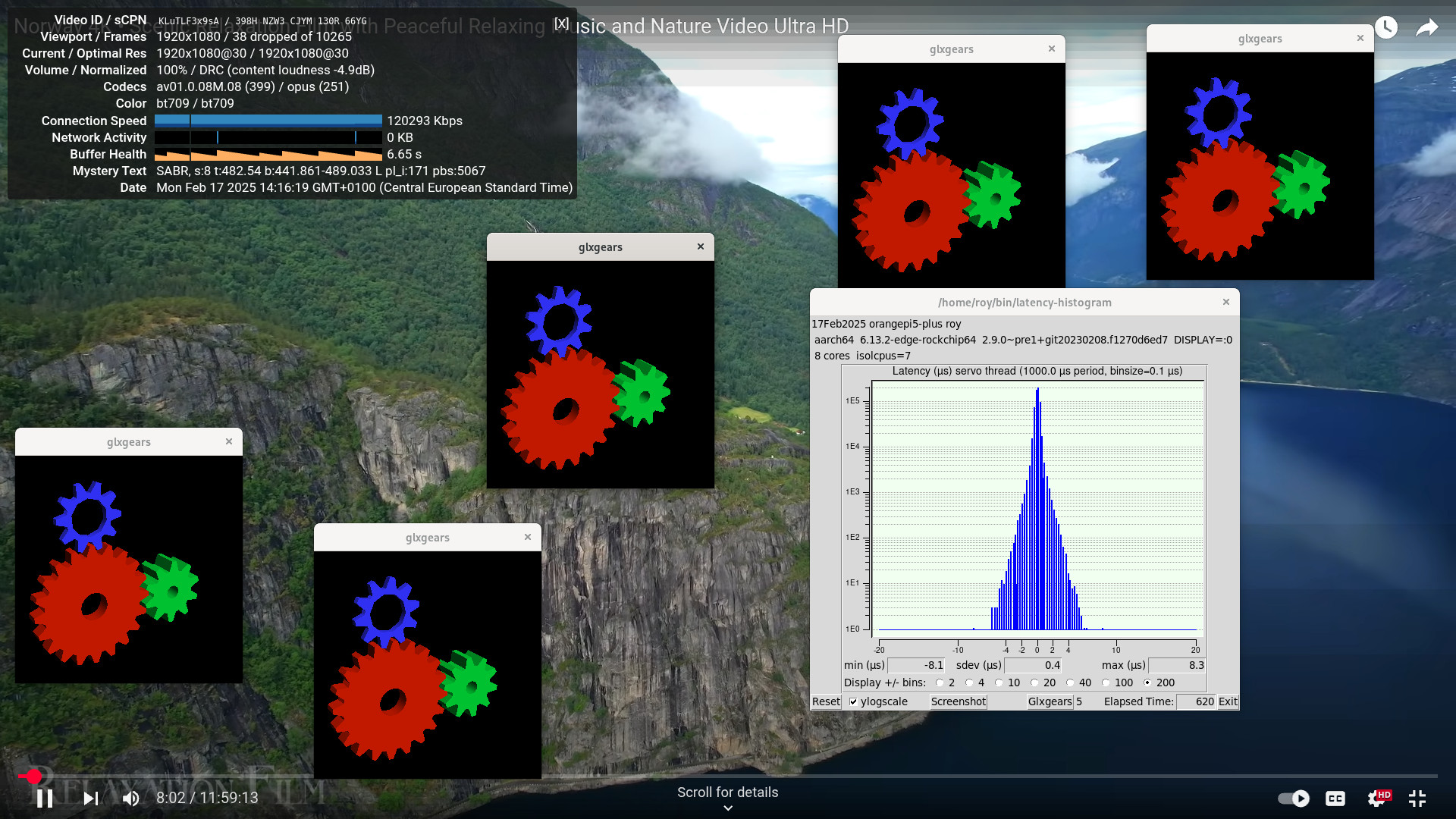
Replied by royka on topic Can the OPI5 be Configured to Run LCNC?
Can the OPI5 be Configured to Run LCNC?
Category: Computers and Hardware
- aikiaviator
- aikiaviator
17 Feb 2025 13:55
Move Machine to inside soft limits when Probe Basic on was created by aikiaviator
Move Machine to inside soft limits when Probe Basic on
Category: QtPyVCP
- aikiaviator
- aikiaviator
17 Feb 2025 13:26
Replied by aikiaviator on topic MESA 7i96S and Input config
MESA 7i96S and Input config
Category: Basic Configuration
- timo
- timo
17 Feb 2025 13:02 - 17 Feb 2025 13:06
Replied by timo on topic (solved) Documentation Hobbing
(solved) Documentation Hobbing
Category: General LinuxCNC Questions
- rodw

17 Feb 2025 12:06
Replied by rodw on topic (solved) Documentation Hobbing
(solved) Documentation Hobbing
Category: General LinuxCNC Questions
- haasme
- haasme
17 Feb 2025 11:49
Replied by haasme on topic Linuxcnc & the Raspberry Pi (4 & 5) Official Images Only!!!
Linuxcnc & the Raspberry Pi (4 & 5) Official Images Only!!!
Category: Installing LinuxCNC
- tftmarco0

17 Feb 2025 11:36
Replied by tftmarco0 on topic Tried every net solution for days to install linuxcnc
Tried every net solution for days to install linuxcnc
Category: Installing LinuxCNC
- azim4411
- azim4411
17 Feb 2025 11:26
Replied by azim4411 on topic Elumatec SBZ 130/01 retrofit
Elumatec SBZ 130/01 retrofit
Category: CNC Machines
- unknown
- unknown
17 Feb 2025 11:23
Replied by unknown on topic Tried every net solution for days to install linuxcnc
Tried every net solution for days to install linuxcnc
Category: Installing LinuxCNC
- unknown
- unknown
17 Feb 2025 11:17
Replied by unknown on topic Linuxcnc & the Raspberry Pi (4 & 5) Official Images Only!!!
Linuxcnc & the Raspberry Pi (4 & 5) Official Images Only!!!
Category: Installing LinuxCNC
- tftmarco0
17 Feb 2025 11:17
Replied by tftmarco0 on topic Tried every net solution for days to install linuxcnc
Tried every net solution for days to install linuxcnc
Category: Installing LinuxCNC
- unknown
- unknown
17 Feb 2025 11:11
Replied by unknown on topic Tried every net solution for days to install linuxcnc
Tried every net solution for days to install linuxcnc
Category: Installing LinuxCNC
Time to create page: 0.562 seconds