Search Results (Searched for: )
- tommylight

09 Jun 2024 15:55
Replied by tommylight on topic PCIE to PCI Adapters
PCIE to PCI Adapters
Category: General LinuxCNC Questions
- swift.gate0199

09 Jun 2024 15:47
Replied by swift.gate0199 on topic Z-axis homing - Y-axis tuning - ClearPath servo firmware updates
Z-axis homing - Y-axis tuning - ClearPath servo firmware updates
Category: General LinuxCNC Questions
- PhilsWorkshop
- PhilsWorkshop
09 Jun 2024 15:38
Jogging with feed per revolution (F/rev) was created by PhilsWorkshop
Jogging with feed per revolution (F/rev)
Category: HAL

- jimmyrig
- jimmyrig
09 Jun 2024 14:56
- jimmyrig
- jimmyrig
09 Jun 2024 14:52
Replied by jimmyrig on topic Z-axis homing - Y-axis tuning - ClearPath servo firmware updates
Z-axis homing - Y-axis tuning - ClearPath servo firmware updates
Category: General LinuxCNC Questions
- PCW

09 Jun 2024 14:17
Replied by PCW on topic Voltage encoder with 7i97T board
Voltage encoder with 7i97T board
Category: Driver Boards
- Aciera

09 Jun 2024 12:28
- Hossein74Majidi
- Hossein74Majidi
09 Jun 2024 12:13
Replied by Hossein74Majidi on topic Can the OPI5 be Configured to Run LCNC?
Can the OPI5 be Configured to Run LCNC?
Category: Computers and Hardware
- Hawk83
- Hawk83
09 Jun 2024 12:11
- greg23_78
- greg23_78
09 Jun 2024 11:50
Voltage encoder with 7i97T board was created by greg23_78
Voltage encoder with 7i97T board
Category: Driver Boards
- ThyerHazard
09 Jun 2024 10:52
Replied by ThyerHazard on topic PCIE to PCI Adapters
PCIE to PCI Adapters
Category: General LinuxCNC Questions
- Cant do this anymore bye all

09 Jun 2024 10:16
Replied by Cant do this anymore bye all on topic Can the OPI5 be Configured to Run LCNC?
Can the OPI5 be Configured to Run LCNC?
Category: Computers and Hardware
- Aciera
09 Jun 2024 10:01
Replied by Aciera on topic PCIE to PCI Adapters
PCIE to PCI Adapters
Category: General LinuxCNC Questions
- ThyerHazard
09 Jun 2024 08:49
Replied by ThyerHazard on topic PCIE to PCI Adapters
PCIE to PCI Adapters
Category: General LinuxCNC Questions
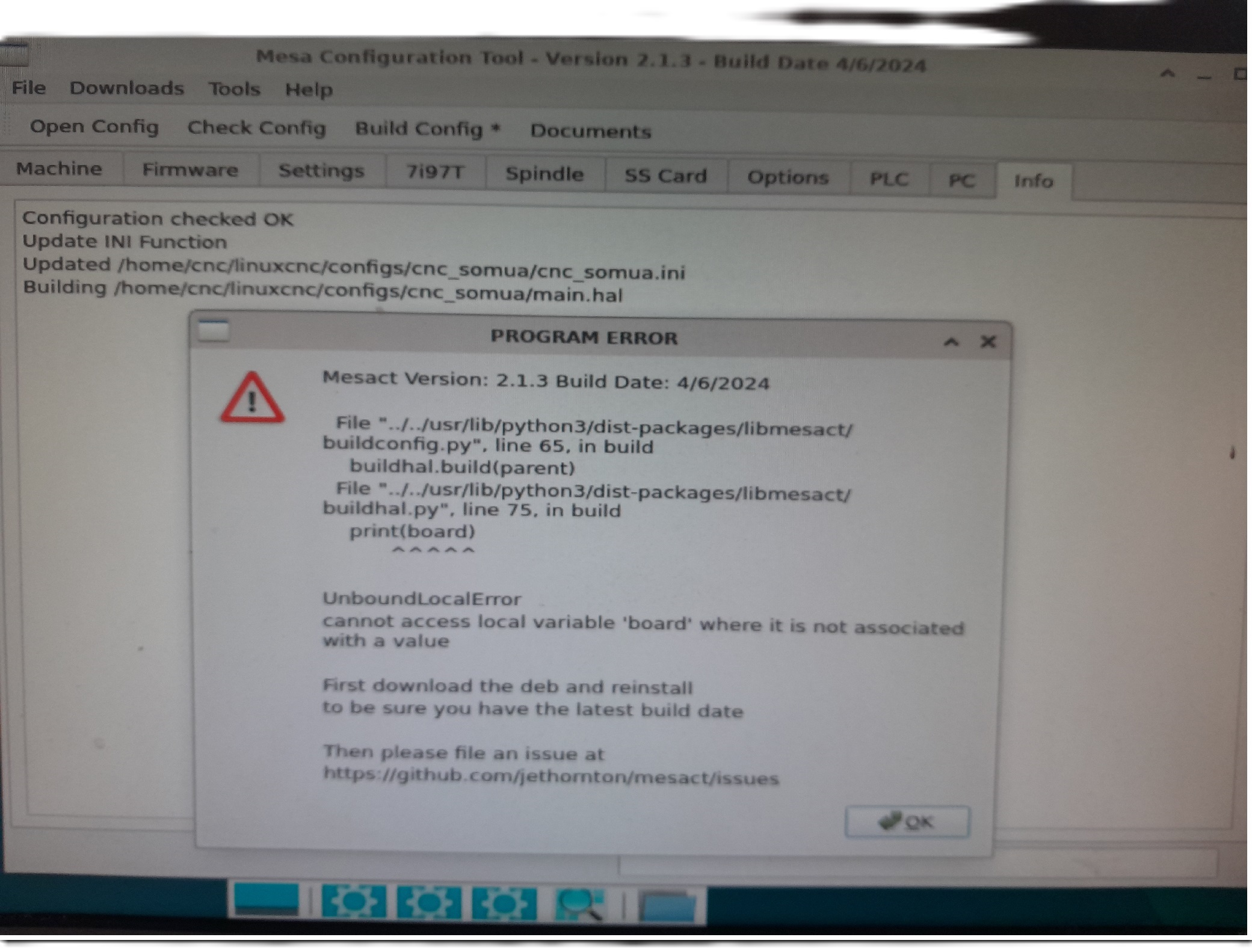
- greg23_78
- greg23_78
09 Jun 2024 08:36
mesact - build config error was created by greg23_78
mesact - build config error
Category: Driver Boards
Time to create page: 0.632 seconds