Can the OPI5 be Configured to Run LCNC?
- royka
- Offline
- Platinum Member
-

Less
More
- Posts: 383
- Thank you received: 135
08 Jun 2024 13:21 - 08 Jun 2024 13:23 #302627
by royka
Replied by royka on topic Can the OPI5 be Configured to Run LCNC?
To improve the latency by the way, you could add the following to /boot/armbianEnv.txt :
extraargs=cma=128M isolcpus=5,7
I've just tried to compile it and it seems to work fine, do you have the following file?
/usr/lib/linuxcnc/modules/hal_op5_io.so
In case you don't have that file you could try to copy the already compiled file (hal_op5_io.so from the zip file) to "/usr/lib/linuxcnc/modules/"
extraargs=cma=128M isolcpus=5,7
I've just tried to compile it and it seems to work fine, do you have the following file?
/usr/lib/linuxcnc/modules/hal_op5_io.so
In case you don't have that file you could try to copy the already compiled file (hal_op5_io.so from the zip file) to "/usr/lib/linuxcnc/modules/"
Last edit: 08 Jun 2024 13:23 by royka.
The following user(s) said Thank You: Hossein74Majidi
Please Log in or Create an account to join the conversation.
- Hossein74Majidi
- Offline
- Senior Member
-

Less
More
- Posts: 44
- Thank you received: 0
09 Jun 2024 06:20 #302663
by Hossein74Majidi
Replied by Hossein74Majidi on topic Can the OPI5 be Configured to Run LCNC?
Yeah, I do have the hal_op5_io.so file in that directory.
Now I'm getting this error:
Thread 'base-thread' not found.
does it mean something wrong with my hal_op5_io?
Now I'm getting this error:
Thread 'base-thread' not found.
does it mean something wrong with my hal_op5_io?
Please Log in or Create an account to join the conversation.
- Cant do this anymore bye all
-

- Offline
- Platinum Member
-
Less
More
- Posts: 1200
- Thank you received: 425
09 Jun 2024 07:00 #302664
by Cant do this anymore bye all
Replied by Cant do this anymore bye all on topic Can the OPI5 be Configured to Run LCNC?
Means there's an issue with your config, could be a typo.
Posting hal & ini helps.
Posting hal & ini helps.
The following user(s) said Thank You: Hossein74Majidi
Please Log in or Create an account to join the conversation.
- Hossein74Majidi
- Offline
- Senior Member
-
Less
More
- Posts: 44
- Thank you received: 0
09 Jun 2024 07:06 - 09 Jun 2024 07:35 #302665
by Hossein74Majidi
Replied by Hossein74Majidi on topic Can the OPI5 be Configured to Run LCNC?
Here's my hal and ini file.
The whole error is attached too.
The whole error is attached too.
Last edit: 09 Jun 2024 07:35 by Hossein74Majidi.
Please Log in or Create an account to join the conversation.
- Cant do this anymore bye all
-
- Offline
- Platinum Member
-
Less
More
- Posts: 1200
- Thank you received: 425
09 Jun 2024 10:16 #302672
by Cant do this anymore bye all
Replied by Cant do this anymore bye all on topic Can the OPI5 be Configured to Run LCNC?
Your hal file in missing the lines that load the base & servo thread. And few other bits & pieces.
At the start of your hal file you'll need something like this
And you need to sort out the issue withThis could be the file not existing or you don't have the correct permissions to access the file. Unfortunately as the whole error log isn't there, just a screenshot or a small part, I can't comment any further.
At the start of your hal file you'll need something like this
# first load all the RT modules that will be needed
# kinematics
loadrt [KINS]KINEMATICS
# motion controller, get name and thread periods from INI file
loadrt [EMCMOT]EMCMOT base_period_nsec=[EMCMOT]BASE_PERIOD servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTSAnd you need to sort out the issue with
mv: cannot stat 'dev/ttyFIQ0'
The following user(s) said Thank You: Hossein74Majidi
Please Log in or Create an account to join the conversation.
- Hossein74Majidi
- Offline
- Senior Member
-
Less
More
- Posts: 44
- Thank you received: 0
09 Jun 2024 12:13 #302676
by Hossein74Majidi
Replied by Hossein74Majidi on topic Can the OPI5 be Configured to Run LCNC?
Yes Thanks a lot. That was the problem
and also after correcting that, "mv: cannot stat 'dev/ttyFIQ0'" doesn't show up anymore too.
Thank u
and also after correcting that, "mv: cannot stat 'dev/ttyFIQ0'" doesn't show up anymore too.
Thank u
Please Log in or Create an account to join the conversation.
- briansm
- Offline
- New Member
-

Less
More
- Posts: 3
- Thank you received: 1
13 Sep 2024 05:30 #310047
by briansm
Replied by briansm on topic Can the OPI5 be Configured to Run LCNC?
Thanks for the excellent work @royka! Your deb files are exceptionally good.
I've experimented with various PREEMPT_RT patches for kernels 6.6 and 6.1, but haven't been able to achieve the impressively low real-time latency that you did for kernel 5.10.160 (testing with OrangePi5 Plus and OrangePi5 Max).
Could you share some insights for us to learn from? Or do you have the kernel patch/source that I can use to reproduce your build for kernel 5.10.160? I'd like to learn and apply the same techniques for a board with a Cortex A35 processor.
I've experimented with various PREEMPT_RT patches for kernels 6.6 and 6.1, but haven't been able to achieve the impressively low real-time latency that you did for kernel 5.10.160 (testing with OrangePi5 Plus and OrangePi5 Max).
Could you share some insights for us to learn from? Or do you have the kernel patch/source that I can use to reproduce your build for kernel 5.10.160? I'd like to learn and apply the same techniques for a board with a Cortex A35 processor.
Please Log in or Create an account to join the conversation.
- royka
- Offline
- Platinum Member
-
Less
More
- Posts: 383
- Thank you received: 135
13 Sep 2024 15:03 #310090
by royka
Replied by royka on topic Can the OPI5 be Configured to Run LCNC?
Because the source was not mainlined the bsp source was necessary. At the beginning I used the already rt patched source of Rockchip, because the bsp source seems to be cherry picked updated so applying the rt patch yourself won't work.
Then I created a rt patch by comparing the "original" rockchip source by the rt source.
After that, Orange Pi published a rt patched source, to compile that source see:
forum.linuxcnc.org/18-computer/48079-can...cnc?start=310#298309
The config in the attachment (copied from the Rockchip source and added a few things) works well with the RK3588.
So you could try to use that as a reference for the timers/schedulers.
Then I created a rt patch by comparing the "original" rockchip source by the rt source.
After that, Orange Pi published a rt patched source, to compile that source see:
forum.linuxcnc.org/18-computer/48079-can...cnc?start=310#298309
The config in the attachment (copied from the Rockchip source and added a few things) works well with the RK3588.
So you could try to use that as a reference for the timers/schedulers.
The following user(s) said Thank You: briansm
Please Log in or Create an account to join the conversation.
- briansm
- Offline
- New Member
-
Less
More
- Posts: 3
- Thank you received: 1
13 Sep 2024 17:52 #310094
by briansm
Replied by briansm on topic Can the OPI5 be Configured to Run LCNC?
Thanks Royka!
FYR, I left the board run overnight. The max latency was less than 1us. Normally, it's 50 or 100us with other kernel rt patches:
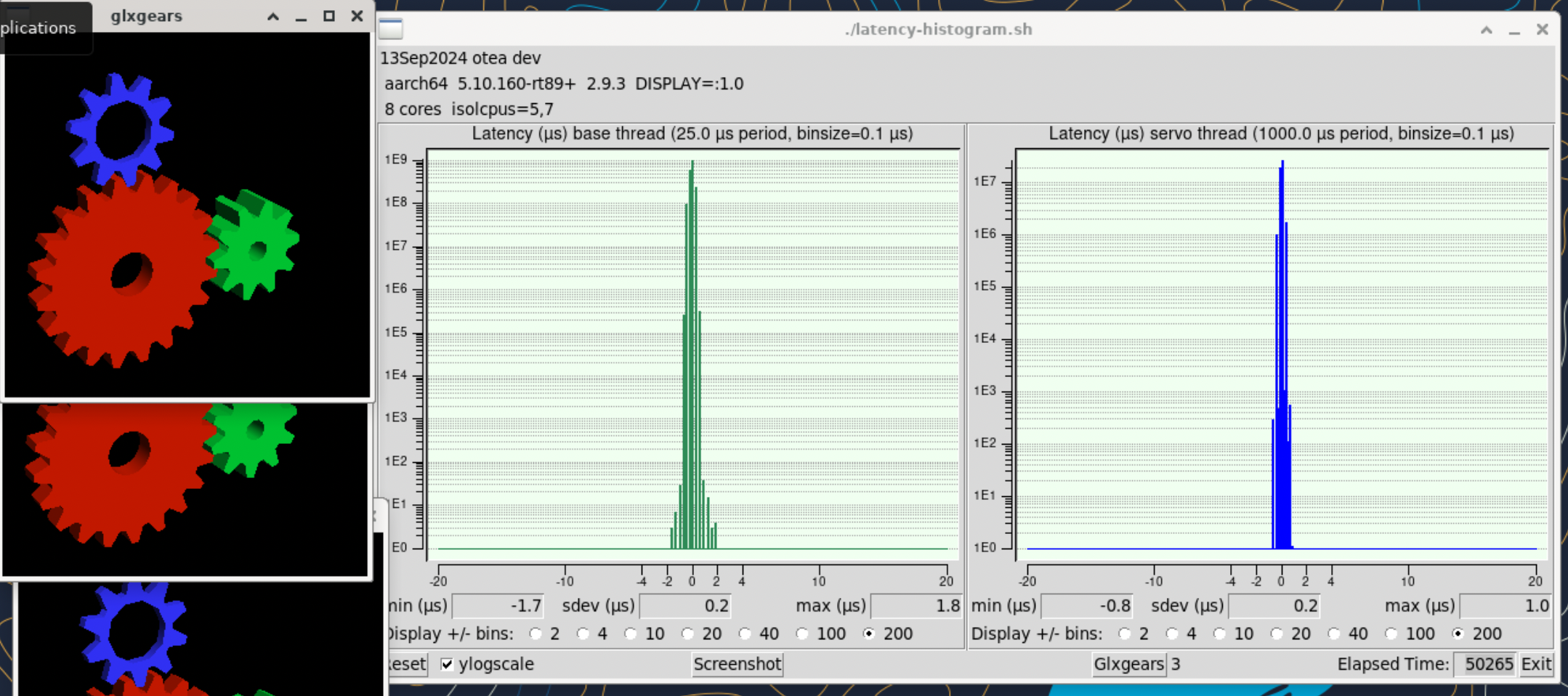
In The cyclictest, the isolated cores (5, 7) have latency less than 3us

FYR, I left the board run overnight. The max latency was less than 1us. Normally, it's 50 or 100us with other kernel rt patches:
In The cyclictest, the isolated cores (5, 7) have latency less than 3us
The following user(s) said Thank You: royka
Please Log in or Create an account to join the conversation.
- royka
- Offline
- Platinum Member
-
Less
More
- Posts: 383
- Thank you received: 135
13 Sep 2024 23:04 #310108
by royka
Replied by royka on topic Can the OPI5 be Configured to Run LCNC?
That's a pretty impressive result! From which board is this?
Please Log in or Create an account to join the conversation.
Time to create page: 0.500 seconds