Search Results (Searched for: )
- tommylight

13 Apr 2025 12:35
Replied by tommylight on topic Linux_Mint_22.1_LinuxCNC_2.10.iso
Linux_Mint_22.1_LinuxCNC_2.10.iso
Category: Installing LinuxCNC
- Aciera

13 Apr 2025 12:11 - 13 Apr 2025 12:12
Replied by Aciera on topic Will the remapped code be executed first when the G code file is loaded?
Will the remapped code be executed first when the G code file is loaded?
Category: G&M Codes
- DavidK
- DavidK
13 Apr 2025 11:56
Replied by DavidK on topic Will the remapped code be executed first when the G code file is loaded?
Will the remapped code be executed first when the G code file is loaded?
Category: G&M Codes
- jc2ktr
- jc2ktr
13 Apr 2025 11:54
Replied by jc2ktr on topic Linux_Mint_22.1_LinuxCNC_2.10.iso
Linux_Mint_22.1_LinuxCNC_2.10.iso
Category: Installing LinuxCNC
- hermann1976

13 Apr 2025 09:52 - 13 Apr 2025 09:52
Replied by hermann1976 on topic NativeCam on LinuxCNC 2.9.3
NativeCam on LinuxCNC 2.9.3
Category: NativeCAM
- tommylight
13 Apr 2025 09:16
Replied by tommylight on topic Retrofit plasma and Hyperterm max 100 HF/HV problems??
Retrofit plasma and Hyperterm max 100 HF/HV problems??
Category: Plasma & Laser
- theysayzmajtome
- theysayzmajtome
13 Apr 2025 09:09
Replied by theysayzmajtome on topic Retrofit plasma and Hyperterm max 100 HF/HV problems??
Retrofit plasma and Hyperterm max 100 HF/HV problems??
Category: Plasma & Laser
")
- NTULINUX

13 Apr 2025 08:59
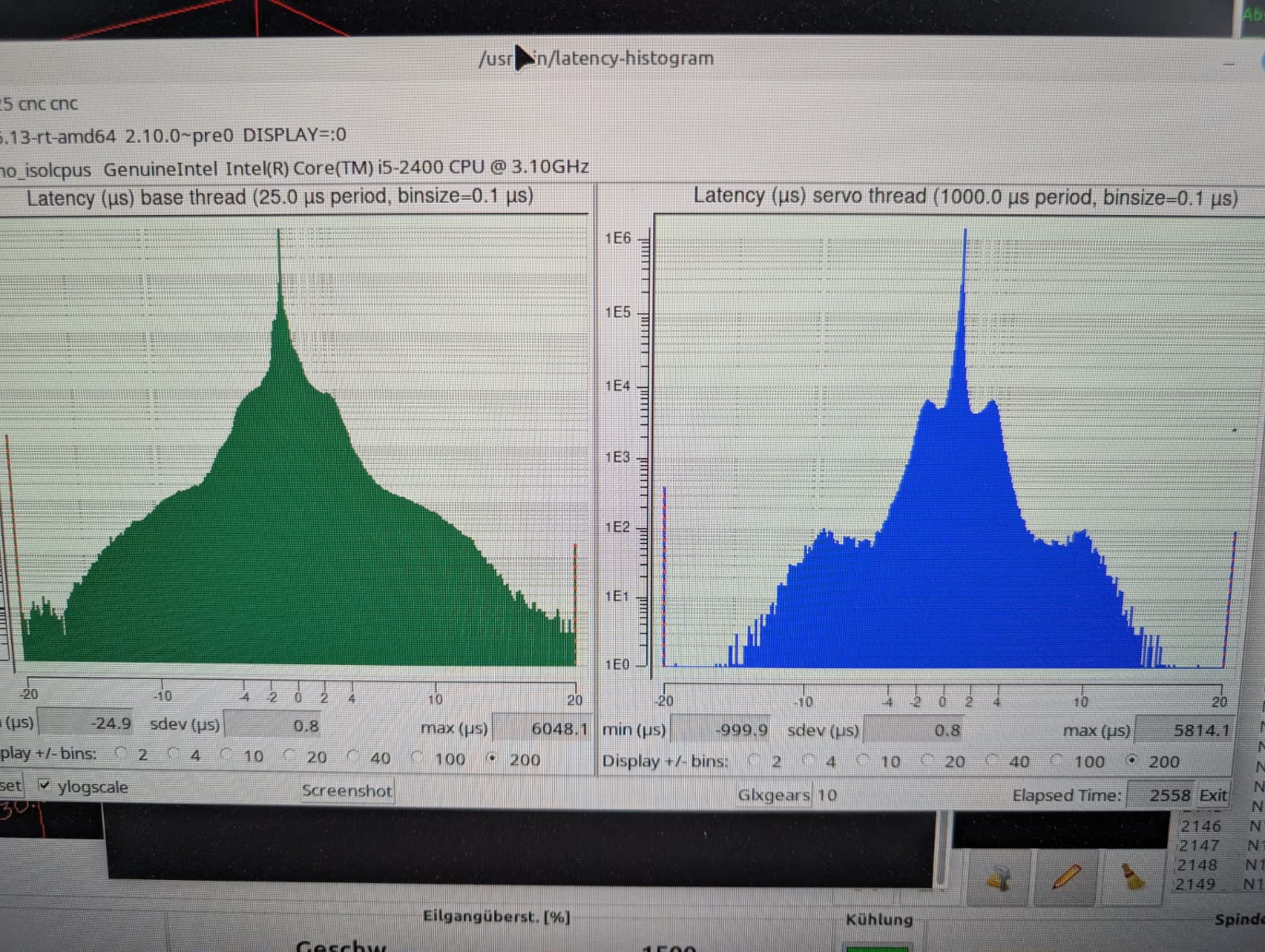
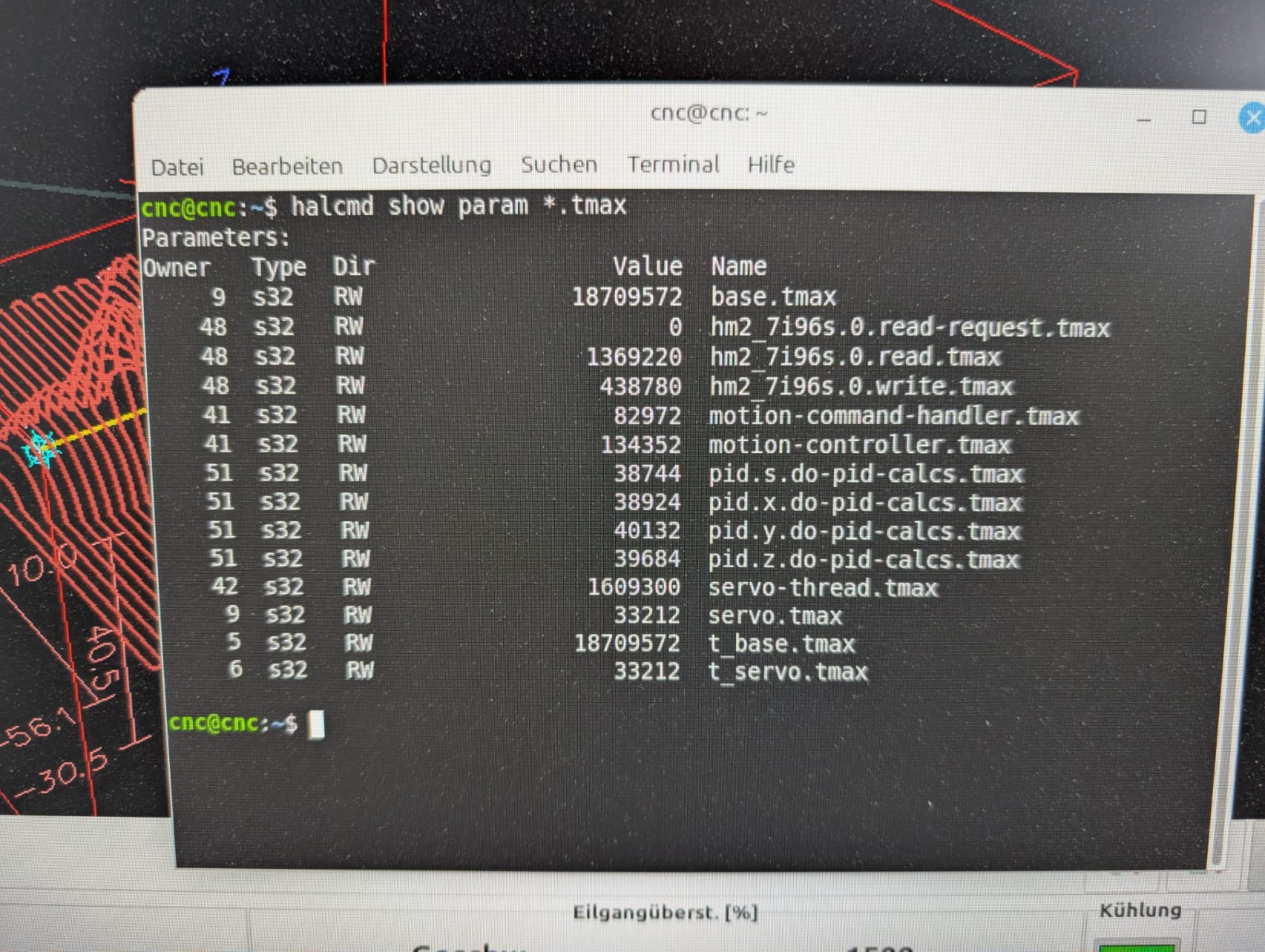
Replied by NTULINUX on topic Latency and Graphics Card
Latency and Graphics Card
Category: General LinuxCNC Questions
- tommylight
13 Apr 2025 08:18
Replied by tommylight on topic Retrofit plasma and Hyperterm max 100 HF/HV problems??
Retrofit plasma and Hyperterm max 100 HF/HV problems??
Category: Plasma & Laser
- tommylight
13 Apr 2025 08:16
Replied by tommylight on topic Linux_Mint_22.1_LinuxCNC_2.10.iso
Linux_Mint_22.1_LinuxCNC_2.10.iso
Category: Installing LinuxCNC
- ErwinCNC
- ErwinCNC
13 Apr 2025 07:58
- theysayzmajtome
- theysayzmajtome
13 Apr 2025 07:42 - 13 Apr 2025 07:43
Retrofit plasma and Hyperterm max 100 HF/HV problems?? was created by theysayzmajtome
Retrofit plasma and Hyperterm max 100 HF/HV problems??
Category: Plasma & Laser
- PCW

13 Apr 2025 01:06
- ErwinCNC
- ErwinCNC
13 Apr 2025 00:47
- PCW
13 Apr 2025 00:36
Replied by PCW on topic Yaskawa SGDH-10AE and 7i95 Not Controlling drive
Yaskawa SGDH-10AE and 7i95 Not Controlling drive
Category: General LinuxCNC Questions
Time to create page: 0.407 seconds