Search Results (Searched for: )
- tommylight

04 Nov 2024 00:28
To forum member Aciera was created by tommylight
To forum member Aciera
Category: Off Topic and Test Posts
- tommylight
04 Nov 2024 00:14
Replied by tommylight on topic Ye old *axis following error...
Ye old *axis following error...
Category: General LinuxCNC Questions
")
- tommylight
04 Nov 2024 00:10
Replied by tommylight on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- M4MazakUser
- M4MazakUser
03 Nov 2024 23:48 - 03 Nov 2024 23:48
- M4MazakUser
- M4MazakUser
03 Nov 2024 23:00
Replied by M4MazakUser on topic Program restart wipes g61
Program restart wipes g61
Category: General LinuxCNC Questions
- M4MazakUser
- M4MazakUser
03 Nov 2024 22:56
Program restart wipes g61 was created by M4MazakUser
Program restart wipes g61
Category: General LinuxCNC Questions
- M4MazakUser
- M4MazakUser
03 Nov 2024 22:48
Replied by M4MazakUser on topic Ye old *axis following error...
Ye old *axis following error...
Category: General LinuxCNC Questions
- M4MazakUser
- M4MazakUser
03 Nov 2024 22:44 - 03 Nov 2024 22:45
Replied by M4MazakUser on topic Ye old *axis following error...
Ye old *axis following error...
Category: General LinuxCNC Questions
- Muftijaja
- Muftijaja
03 Nov 2024 22:13 - 04 Nov 2024 12:18
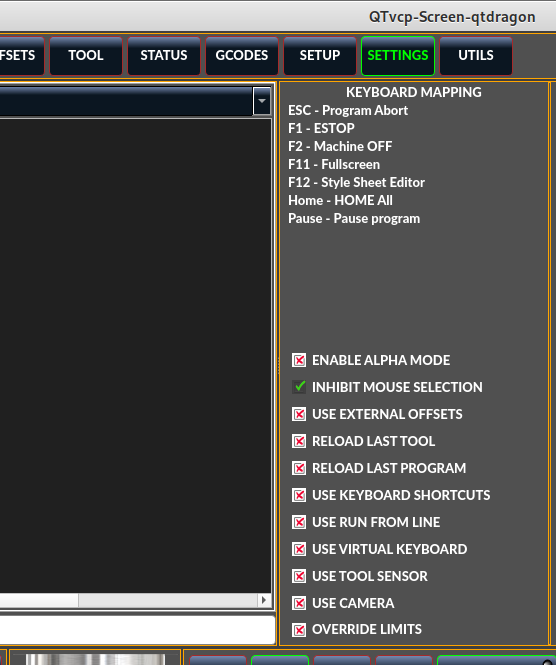
QT Dragon - Funktionstaste mit "Override limits" belegen? was created by Muftijaja
QT Dragon - Funktionstaste mit "Override limits" belegen?
Category: Deutsch
- digiex_chris
- digiex_chris
03 Nov 2024 22:08
Replied by digiex_chris on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- rammfr
- rammfr
03 Nov 2024 21:27 - 03 Nov 2024 22:03
Replied by rammfr on topic Ethercat, EL6751 and CANOpen
Ethercat, EL6751 and CANOpen
Category: EtherCAT
- rammfr
- rammfr
03 Nov 2024 21:23 - 04 Nov 2024 07:36
Replied by rammfr on topic Ethercat, EL6751 and CANOpen
Ethercat, EL6751 and CANOpen
Category: EtherCAT
- endian

03 Nov 2024 18:58 - 03 Nov 2024 19:21
Replied by endian on topic Ethercat, EL6751 and CANOpen
Ethercat, EL6751 and CANOpen
Category: EtherCAT
- Aciera

03 Nov 2024 18:25
Replied by Aciera on topic Z axis goes in the wrong direction, so after home-all
Z axis goes in the wrong direction, so after home-all
Category: StepConf Wizard
- endian
03 Nov 2024 18:24
Replied by endian on topic Ethercat, EL6751 and CANOpen
Ethercat, EL6751 and CANOpen
Category: EtherCAT
Time to create page: 0.548 seconds