Search Results (Searched for: )
- Aciera

24 Oct 2024 13:10 - 24 Oct 2024 13:14
Replied by Aciera on topic linuxcnc trajectory planner
linuxcnc trajectory planner
Category: General LinuxCNC Questions
- Aciera
24 Oct 2024 13:09
Replied by Aciera on topic linuxcnc trajectory planner
linuxcnc trajectory planner
Category: General LinuxCNC Questions
- JT

24 Oct 2024 13:06
- tommylight

24 Oct 2024 13:06
Replied by tommylight on topic Base Thread Over 100k
Base Thread Over 100k
Category: General LinuxCNC Questions
- tiagounderground
- tiagounderground
24 Oct 2024 13:02
Replied by tiagounderground on topic linuxcnc trajectory planner
linuxcnc trajectory planner
Category: General LinuxCNC Questions
- Aciera
24 Oct 2024 13:01
- Abdulkareem
- Abdulkareem
24 Oct 2024 12:50
- Aciera
24 Oct 2024 12:49
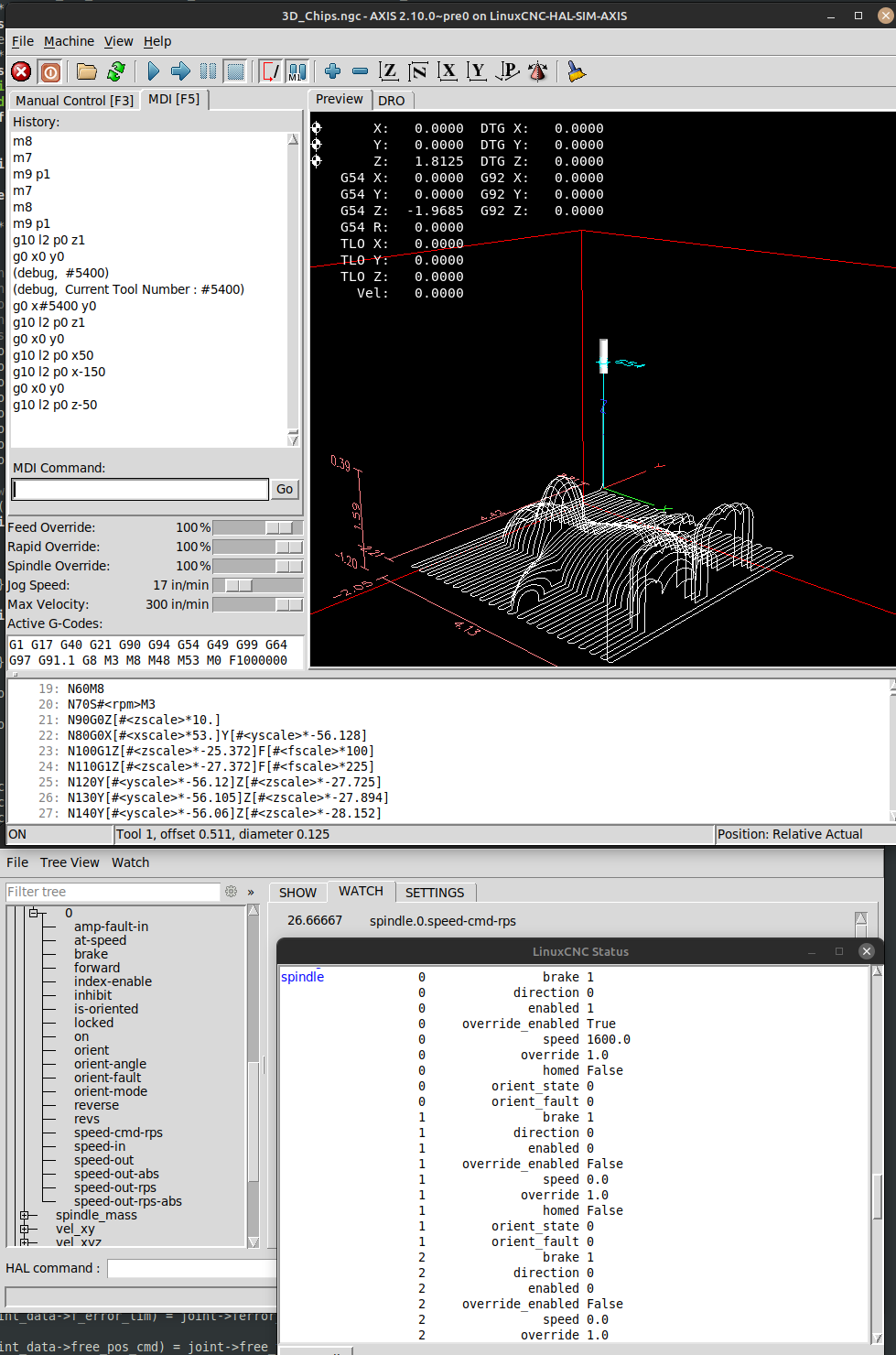
Replied by Aciera on topic Gmoccapy - spindle restarts at program stop
Gmoccapy - spindle restarts at program stop
Category: Gmoccapy
- Aciera
24 Oct 2024 12:47
Replied by Aciera on topic Gmoccapy - spindle restarts at program stop
Gmoccapy - spindle restarts at program stop
Category: Gmoccapy
- Grotius

24 Oct 2024 12:44
Replied by Grotius on topic linuxcnc trajectory planner
linuxcnc trajectory planner
Category: General LinuxCNC Questions

- Micro2000
- Micro2000
24 Oct 2024 12:27 - 24 Oct 2024 12:47
Replied by Micro2000 on topic Base Thread Over 100k
Base Thread Over 100k
Category: General LinuxCNC Questions
- Aciera
24 Oct 2024 12:21 - 24 Oct 2024 12:26
Replied by Aciera on topic linuxcnc trajectory planner
linuxcnc trajectory planner
Category: General LinuxCNC Questions
- meister
- meister
24 Oct 2024 12:17
- MennilTossFlykune
- MennilTossFlykune
24 Oct 2024 12:15
Replied by MennilTossFlykune on topic Gmoccapy - spindle restarts at program stop
Gmoccapy - spindle restarts at program stop
Category: Gmoccapy
- Aciera
24 Oct 2024 12:03 - 24 Oct 2024 12:05
Replied by Aciera on topic linuxcnc trajectory planner
linuxcnc trajectory planner
Category: General LinuxCNC Questions
Time to create page: 0.585 seconds