linuxcnc trajectory planner
- Aciera
-

- Offline
- Administrator
-

- Posts: 4743
- Thank you received: 2125
My first intuition would make me think that this happens because the vertical line segment is too short to be trimmed back far enough to fit a fillet with the requested G64 Px Qx properties. In this case I would expect the optimizer to either
not cut the segment at all and not create a fillet
or (a more sophisticated path)
cut the segment the way it does now (ie to the minimum length) and create a fillet with adjusted parameters so it does not extend beyond the original segments.
int optimizer::trimCurve(emcmot_segment& seg, int& trim_front, int& trim_back) {
double trim_distance = G64P; /*seg.tag.fields_float[3];*/ // G64 P..
// Trim conditions.
if(trim_distance<=0){
std::cout<<"no trim distance for segment id:"<<seg.id<<std::endl;
return 0;
}
if (trim_distance >= seg.length / 2.0) {
trim_distance = (seg.length / 2.0)-1e-3;
}
if(trim_distance<=1e-6){
std::cout<<"too short to trim, no trim is done for segment id:"<<seg.id<<std::endl;
return 0;
}
if(seg.canon_motion_type==1 || seg.canon_motion_type==2){
trimLine(seg,trim_distance,trim_front,trim_back,false);
}
if(seg.canon_motion_type==3){
trimCircle(seg,trim_distance,trim_front,trim_back,false);
}
return 0;
}Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
- Posts: 4743
- Thank you received: 2125
int optimizer::trimCurves(vector& ptr_vector) {
// Trim all the curves back given the G64 P.. value.
for (std::size_t i = 0; i < ptr_vector.vec.size(); ++i) {
int trim_front=0;
int trim_back=0;
if(i>0){
trim_front=1;
}
if(i<ptr_vector.vec.size()-1){
trim_back=1;
}
// If next segment is colear, dont trim this end. Must be a line-line.
if(i<ptr_vector.vec.size()-1){
const struct emcmot_segment &seg = ptr_vector.vec.at(i);
const struct emcmot_segment &seg_next = ptr_vector.vec.at(i+1);
int res=isColinear(seg.start.tran, seg.end.tran, seg_next.end.tran);
if(seg.canon_motion_type!=3 && seg_next.canon_motion_type!=3 && res==1){
trim_back=0;
}
}
// If previous segment is colear, dont trim this start. Must be a line-line.
if(i>0){
const struct emcmot_segment &seg = ptr_vector.vec.at(i);
const struct emcmot_segment &seg_prev = ptr_vector.vec.at(i-1);
int res=isColinear(seg.start.tran, seg.end.tran, seg_prev.start.tran);
if(seg.canon_motion_type!=3 && seg_prev.canon_motion_type!=3 && res==1){
trim_front=0;
}
}
if (0 != trimCurve(ptr_vector.vec.at(i),trim_front,trim_back)) {
std::cerr << "Failed to trim curve at index " << i << std::endl;
return -1;
}
}
std::cout<<"trim curves done."<<std::endl;
return 0;
}
Is there a particular reason for not handling one fillet after the other?
In my mind it would be beneficial if the trimming process could actually influence how the filleting was done for a particular intersection which seems difficult in the current code.[edit]
Anyway, no point in getting carried away by details at this stage. The code seems to give you good enough input to continue with the next step of the project.
Please Log in or Create an account to join the conversation.
- Grotius
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

- Posts: 2419
- Thank you received: 2348
Post 22 Oct 2024 06:03
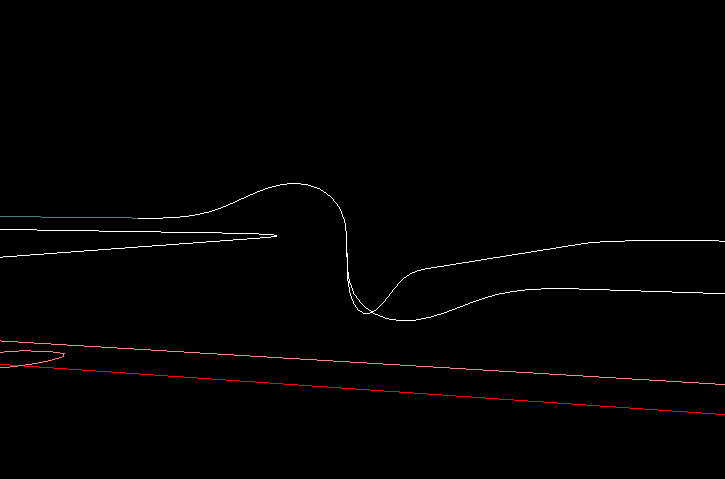
This go trough workplane bottom problem can be avoided by checking :
1.If you have a trim lenght of 5mm. And the line is 15mm, then the line will be trimmed at the ends, resulting a netto line length 5mm.
2.In the case of your post, the trim dist is divided to fit. The line is for example 5mm. Trimming 5mm both ends will fail, then the trim is
divided to fit, wich results for example in a trim 2.4mm x 2 = 4.8mm, Then the netto line is 0.2mm.
Related calculation:
if (trim_distance >= seg.length / 2.0) {
trim_distance = (seg.length / 2.0)-1e-3;
} Solution:
When a trim distance has to be lowered to fit, this then can be a reason to skip this line trim. Let the line as is.
When a full trim fit can be done, the clothoid has no reason to go trough the bottom of the workplane. This then is valid.
Post 22 Oct 2024 07:50
The function loops to all the segments. Here it sets one exception:
Do not trim this line end if upcoming line is colinear to this.
We can add more exceptions here.
Is there a particular reason for not handling one fillet after the other?
In a other function, we start with a list of segments. (gcode input) .
They then already have a flag if they may be trimmed front & back.
It this point the empty fillet segments are inserted inbetween. This is a vector insert operation.
Once the empty segments are in place. Then we add the values to the fillet by looking, what kind of fillet we are going to produce.
We now have 3 types : line, bspline or clothoid.
Nice you are digging into the code!
Are you using qt for it as viewer and editor? This should be the nice as you can load the cmakelists directly in qt.
Good luck.
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
- Posts: 2419
- Thank you received: 2348
the workplane.
Otherwise when using the bspline fillets, this uses a set off controlpoints. I suggest that bsplines are still valid, as they don't need
to solve the G2 problem.
Line fillets (chamfers) are still valid.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
- Posts: 4743
- Thank you received: 2125
Are you using qt for it as viewer and editor? This should be the nice as you can load the cmakelists directly in qt.
No, I'm using Eclipse, mostly because I remember the headaches I had trying to get Qt installed and setup correctly.
I played around a bit and moved the test for segment length vs trim_distance to 'trimCurves' which seems to work (although sometimes there is a problem with the first corner being falsely excluded apparently depending on where the tool is located at startup):
diff --git a/src/emc/motion/optimizer.cpp b/src/emc/motion/optimizer.cpp
index 21898a1..230c8fe 100644
--- a/src/emc/motion/optimizer.cpp
+++ b/src/emc/motion/optimizer.cpp
@@ -62,7 +62,12 @@ int optimizer::trimCurves(vector& ptr_vector) {
// Trim all the curves back given the G64 P.. value.
for (std::size_t i = 0; i < ptr_vector.vec.size(); ++i) {
-
+ double trim_distance = G64P; /*seg.tag.fields_float[3];*/ // G64 P..
+ // Trim conditions.
+ if(trim_distance<=0){
+ std::cout<<"no trim distance for segment id:"<<seg.id<<std::endl;
+ return 0;
+ }
int trim_front=0;
int trim_back=0;
@@ -74,18 +79,27 @@ int optimizer::trimCurves(vector& ptr_vector) {
trim_back=1;
}
- // If next segment is colear, dont trim this end. Must be a line-line.
+ // If next segment is colinear, dont trim this end. Must be a line-line.
if(i<ptr_vector.vec.size()-1){
const struct emcmot_segment &seg = ptr_vector.vec.at(i);
const struct emcmot_segment &seg_next = ptr_vector.vec.at(i+1);
+ std::cout<<"segment: "<<seg.id<<std::endl;
+ std::cout<<"trim_distance: "<<trim_distance<<std::endl;
+ std::cout<<"segment length: "<<seg.length<<std::endl;
+ std::cout<<"next segment length:"<<seg_next.length<<std::endl;
int res=isColinear(seg.start.tran, seg.end.tran, seg_next.end.tran);
if(seg.canon_motion_type!=3 && seg_next.canon_motion_type!=3 && res==1){
trim_back=0;
}
+
+ if (trim_distance >= seg_next.length / 2.0 || trim_distance >= seg.length / 2.0) {
+ std::cout<<"next segment or this segment too short, no trim_back for this segment:"<<seg.id<<std::endl;
+ trim_back=0;
+ }
}
- // If previous segment is colear, dont trim this start. Must be a line-line.
+ // If previous segment is colinear, dont trim this start. Must be a line-line.
if(i>0){
const struct emcmot_segment &seg = ptr_vector.vec.at(i);
const struct emcmot_segment &seg_prev = ptr_vector.vec.at(i-1);
@@ -94,11 +108,16 @@ int optimizer::trimCurves(vector& ptr_vector) {
if(seg.canon_motion_type!=3 && seg_prev.canon_motion_type!=3 && res==1){
trim_front=0;
}
- }
- if (0 != trimCurve(ptr_vector.vec.at(i),trim_front,trim_back)) {
- std::cerr << "Failed to trim curve at index " << i << std::endl;
- return -1;
+ if (trim_distance >= seg_prev.length / 2.0 || trim_distance >= seg.length / 2.0) {
+ std::cout<<"previous segment or this segment too short, no trim_front for this segment:"<<seg.id<<std::endl;
+ trim_front=0;
+ }
+
+ if (0 != trimCurve(ptr_vector.vec.at(i),trim_front,trim_back)) {
+ std::cerr << "Failed to trim curve at index " << i << std::endl;
+ return -1;
+ }
}
}
std::cout<<"trim curves done."<<std::endl;
@@ -311,9 +330,9 @@ int optimizer::trimCurve(emcmot_segment& seg, int& trim_front, int& trim_back) {
return 0;
}
- if (trim_distance >= seg.length / 2.0) {
- trim_distance = (seg.length / 2.0)-1e-3;
- }
+ //if (trim_distance >= seg.length / 2.0) {
+ // trim_distance = (seg.length / 2.0)-1e-3;
+ //}
if(trim_distance<=1e-6){
std::cout<<"too short to trim, no trim is done for segment id:"<<seg.id<<std::endl;
Is there a particular reason for not handling one fillet after the other?
In a other function, we start with a list of segments. (gcode input) .
They then already have a flag if they may be trimmed front & back.
It this point the empty fillet segments are inserted inbetween. This is a vector insert operation.
Not sure I understand what you are saying. To me it seems that if we could pass on information about how much the segments of an intersection have been trimmed to the clothoid fitting function we could adjust the parameters of the clothoid such that we fit the larges possible fillet to that intersection. If you see a way to derive this information from the trimmed segments then I'm all for doing it your way
") .
. Attachments:
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
- Posts: 2419
- Thank you received: 2348
The motdot.so logic is that it sends just one gcode line, or it sends a buch of lines.
If it sends just one line,
then it waits for this line to get ready. After that it sends 100+ gcode lines in portions. (most of time 2000 as the buffer size.)
So it's not that we get complete gcode at once. Therefore if we get only one line, we dont trim this one.
You can test this by turning of the program velocity to zero before pressing the run button.
If program speed is zero it won't send the bunch of gcode lines.
If you then turn on the program with speed, it will send more lines at once.
In the logic of the code at the moment, we don't trim the first segment's front. And last segment's back.
Maybe you have an idea what should be the route.
Note:
In the new planner, we are able to buffer including the first segment.
To me it seems that if we could pass on information about how much the segments of an intersection have been trimmed to the clothoid fitting function we could adjust the parameters of the clothoid such that we fit the larges possible fillet to that intersection. If you see a way to derive this information from the trimmed segments then I'm all for doing it your way
We know exactly what we trimmed and how much every segment is trimmed on bot's side's in mm.
The clothoids fit's given a start & end point. The clothoids use a start & endangle, and a curvature start & end.
That are in total 4 double values and 2 points.
So to change a clothoid, the only thing you can do is change the start & end point. Curvature's and Theta's are fixed.
If you mean something else, like max deviation from the clothoid to the path, this can be calculated also.
Installing qt is a terminal command.
sudo apt install qtcreator
sudo apt install qtbase5-dev qt5-qmake qtbase5-dev-tools
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
- Posts: 2419
- Thank you received: 2348
We can check trim sizes on current segment end and next segment start. Then apply the tinyest value. Identical trim value.
Then the clothoid cannot go trough the work plane. Good idea? or was it your idea?
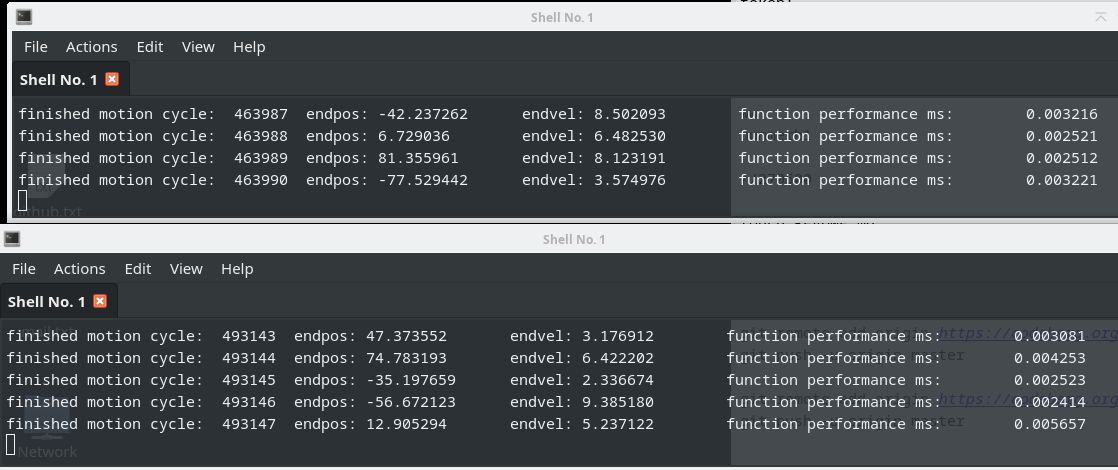
The scurve lib is now heavely tested on random end points. Over millions of iterations are done.
Thanks to that i solved several bugs. I got one really nasty bug after 600 iterations. That's solved.
The performance is quite good : 0.0004 ms for every cycle. For a 9 axis machine : 0.0036 ms.
I have to test the scurve lib using random end velocity's tomorrow.
The lib is now updated to latest version, have done my best. That's all i can do.
scurve lib
Soon we can start with the planner. Maybe first update the filletizer lib with some issue's from our previous conversations.
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
- Posts: 2419
- Thank you received: 2348
Today was a difficult coding day. I expected the stress test would go ok for using end velocity's. But not.
It took again the whole day.
Had some hard times solving a bug : using end velocity's, then when changing from negative to positive direction.
In the end this works now.
these few lines solved it.
Today the scurve lib is stress tested for 2.000.000 iterations, motions using random double values between :
1. Positions -100 to 100
2. End velocity's -10 to 10
The stress test file : stress test
Output, running 2 instances:
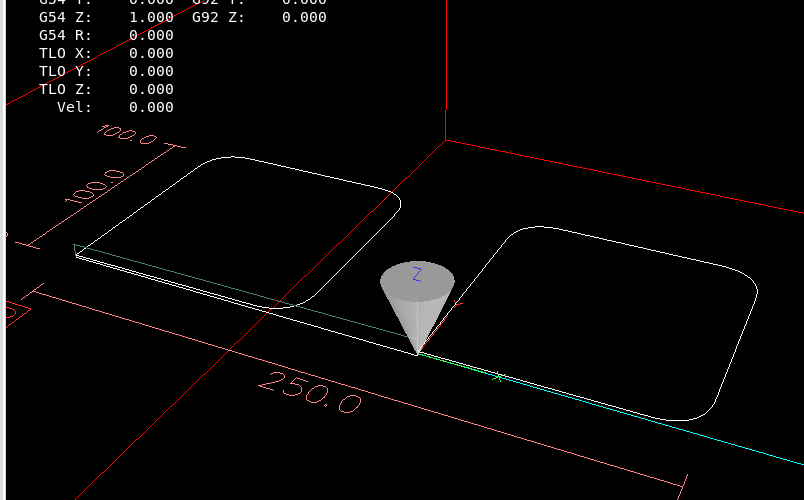
For visualising what is happening i have a gui test app.
Another thing that is changed today is the way we compile projects with cmake.
We now compile each project in it's own build dir, directed by the toplevel cmakelists.
This makes things much easyer.
Normally it would build everything besides the toplevel cmakelists. But this is unwanted for me.
Modified toplevel cmakelists
Ok, we now may expect the scurve planner is stable.

Attachments:
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
- Posts: 2419
- Thank you received: 2348
First off all thanks for the many likes, is appreciated.
Today we made a linuxcnc installer.
Can someone help me to verify if it works ok?
I could be we miss some things.

git clone https://codeberg.org/skynet/linuxcnc_trajectory_planner
cd linuxcnc_trajectory_planner
./installerWork of today:
1. Created a new cmakelists.txt for the clothoid project.
2. Created a library motionizer to calculate the best vo's, ve's, vm's for the trajectory. Also based on curvature input.
3. Created a project installer
4. Renaming of directory's, etc.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
- Posts: 4743
- Thank you received: 2125
cd ~
git clone https://codeberg.org/skynet/linuxcnc_trajectory_planner
cd linuxcnc_trajectory_planner
./installerPlease Log in or Create an account to join the conversation.