Search Results (Searched for: )
- jjdege

01 Aug 2024 20:24 - 01 Aug 2024 20:30
Replied by jjdege on topic Ethercat installation from repositories - how to step by step
Ethercat installation from repositories - how to step by step
Category: EtherCAT
- Aciera

01 Aug 2024 20:19
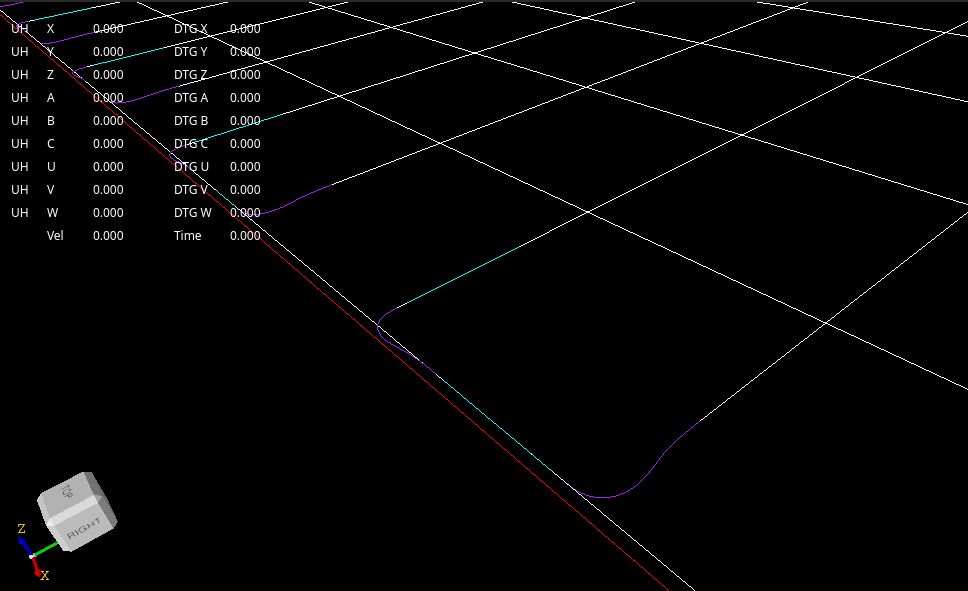
Replied by Aciera on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions
")
- jjdege
01 Aug 2024 20:19 - 01 Aug 2024 20:28
Replied by jjdege on topic Ethercat installation from repositories - how to step by step
Ethercat installation from repositories - how to step by step
Category: EtherCAT
- Grotius

01 Aug 2024 20:14
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions
- cnbbom
- cnbbom
01 Aug 2024 20:14
Replied by cnbbom on topic help with installation
help with installation
Category: Installing LinuxCNC
- Aciera
01 Aug 2024 19:58 - 01 Aug 2024 20:00
Replied by Aciera on topic Closed Loop Computer Vision Enabled CNC
Closed Loop Computer Vision Enabled CNC
Category: QtPyVCP
- Lpkkk
- Lpkkk
01 Aug 2024 19:54
Replied by Lpkkk on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
- Aciera
01 Aug 2024 19:52
Replied by Aciera on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions
- Hauligali22
- Hauligali22
01 Aug 2024 19:48
Closed Loop Computer Vision Enabled CNC was created by Hauligali22
Closed Loop Computer Vision Enabled CNC
Category: QtPyVCP
- tommylight

01 Aug 2024 19:42
Replied by tommylight on topic hm2/hm2_7i96s.0: watchdog has bit! (set the .has-bit pin to false to resume)
hm2/hm2_7i96s.0: watchdog has bit! (set the .has-bit pin to false to resume)
Category: Installing LinuxCNC
- tommylight
01 Aug 2024 19:40
Replied by tommylight on topic help with installation
help with installation
Category: Installing LinuxCNC
- Aciera
01 Aug 2024 19:34
- Grotius
01 Aug 2024 19:31
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions
- jg00163206
01 Aug 2024 19:28
- cnbbom
- cnbbom
01 Aug 2024 19:12
Replied by cnbbom on topic help with installation
help with installation
Category: Installing LinuxCNC
Time to create page: 0.466 seconds