Search Results (Searched for: )
- PCW

10 Aug 2024 21:07
Replied by PCW on topic 7i97t with 7i84d connection problem
7i97t with 7i84d connection problem
Category: Driver Boards
- Krulli_Fräser
- Krulli_Fräser
10 Aug 2024 20:46
Replied by Krulli_Fräser on topic 7i97t with 7i84d connection problem
7i97t with 7i84d connection problem
Category: Driver Boards
- natester
- natester
10 Aug 2024 20:36 - 10 Aug 2024 20:39





- PCW
10 Aug 2024 20:19
Replied by PCW on topic 7i97t with 7i84d connection problem
7i97t with 7i84d connection problem
Category: Driver Boards
- Krulli_Fräser
- Krulli_Fräser
10 Aug 2024 20:09
Replied by Krulli_Fräser on topic 7i97t with 7i84d connection problem
7i97t with 7i84d connection problem
Category: Driver Boards
- PCW
10 Aug 2024 19:57
Replied by PCW on topic 7i97t with 7i84d connection problem
7i97t with 7i84d connection problem
Category: Driver Boards
- rodw

10 Aug 2024 19:55
- rodw
10 Aug 2024 19:47
Replied by rodw on topic Ethercat installation from repositories - how to step by step
Ethercat installation from repositories - how to step by step
Category: EtherCAT
- Krulli_Fräser
- Krulli_Fräser
10 Aug 2024 19:40
Replied by Krulli_Fräser on topic 7i97t with 7i84d connection problem
7i97t with 7i84d connection problem
Category: Driver Boards
- PCW
10 Aug 2024 19:34
- PCW
10 Aug 2024 19:26
Replied by PCW on topic 7i97t with 7i84d connection problem
7i97t with 7i84d connection problem
Category: Driver Boards
- warreng
- warreng
10 Aug 2024 19:22
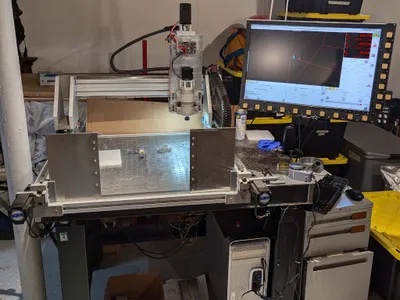
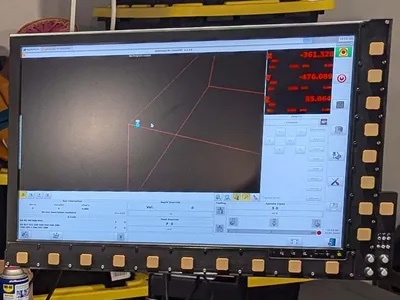
Replied by warreng on topic 5x10 servo router rebuild - analog of step/dir with mesa card?
5x10 servo router rebuild - analog of step/dir with mesa card?
Category: General LinuxCNC Questions
- warreng
- warreng
10 Aug 2024 19:11
Replied by warreng on topic 5x10 servo router rebuild - analog of step/dir with mesa card?
5x10 servo router rebuild - analog of step/dir with mesa card?
Category: General LinuxCNC Questions
- Krulli_Fräser
- Krulli_Fräser
10 Aug 2024 19:03
7i97t with 7i84d connection problem was created by Krulli_Fräser
7i97t with 7i84d connection problem
Category: Driver Boards
- PhilipME

10 Aug 2024 18:27
Time to create page: 0.587 seconds