Search Results (Searched for: )
- NTULINUX

10 Jul 2024 03:21
Replied by NTULINUX on topic New and Working RTAI debs for 2.9
New and Working RTAI debs for 2.9
Category: Installing LinuxCNC
- tlightus
- tlightus
10 Jul 2024 03:14 - 10 Jul 2024 03:16
Replied by tlightus on topic New and Working RTAI debs for 2.9
New and Working RTAI debs for 2.9
Category: Installing LinuxCNC
- Bari

10 Jul 2024 03:03
Replied by Bari on topic New and Working RTAI debs for 2.9
New and Working RTAI debs for 2.9
Category: Installing LinuxCNC
- cmorley
- cmorley
10 Jul 2024 02:18
- onceloved

10 Jul 2024 02:06
Replied by onceloved on topic EtherCat - CATIO module Help
EtherCat - CATIO module Help
Category: EtherCAT
- onceloved
10 Jul 2024 02:05
Replied by onceloved on topic EtherCat - CATIO module Help
EtherCat - CATIO module Help
Category: EtherCAT
- timaer
- timaer
10 Jul 2024 01:51
- tommylight

10 Jul 2024 00:20
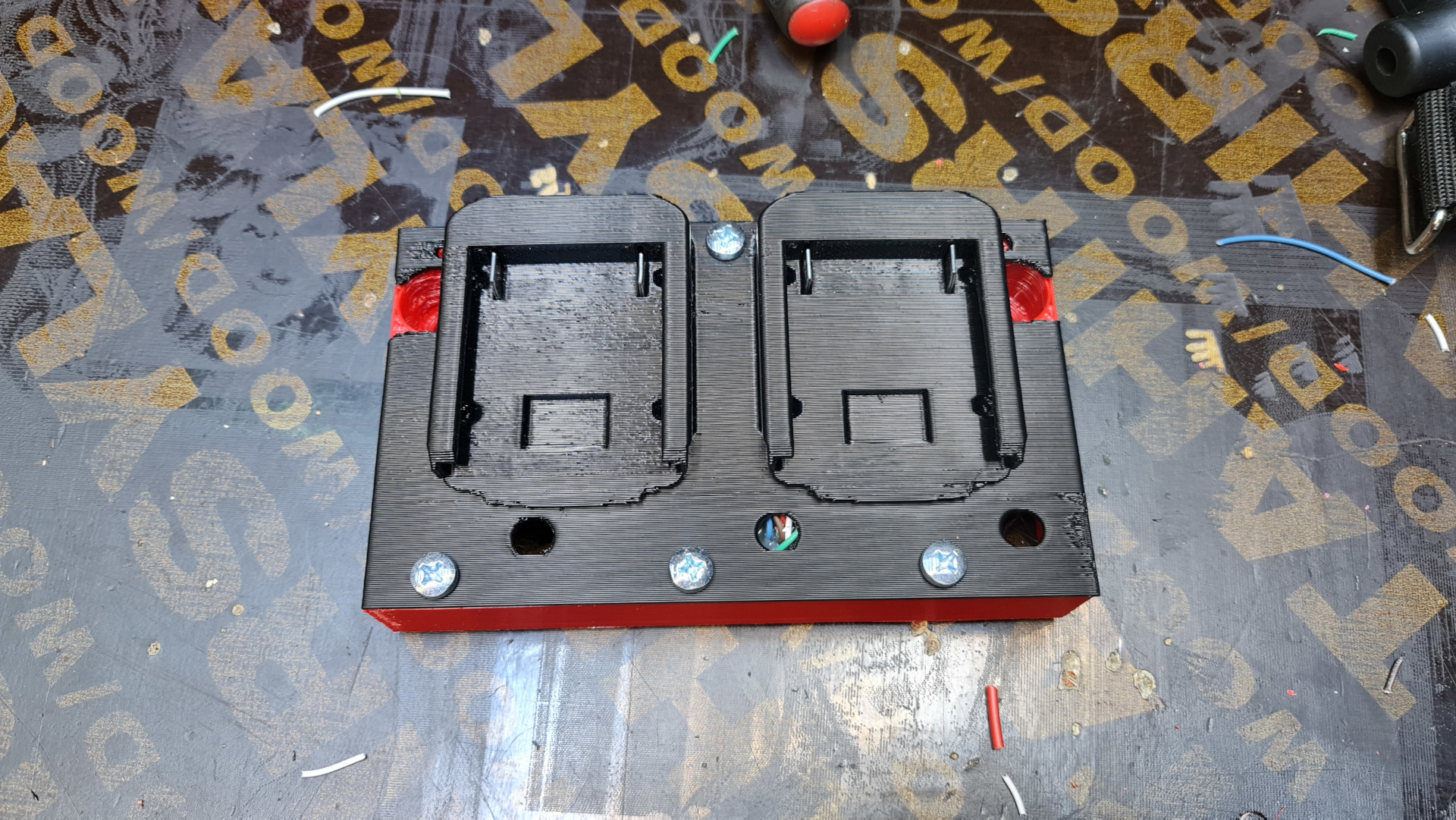
Replied by tommylight on topic 3D printed stuff, showcase it here
3D printed stuff, showcase it here
Category: Additive Manufacturing



- tommylight
09 Jul 2024 23:57
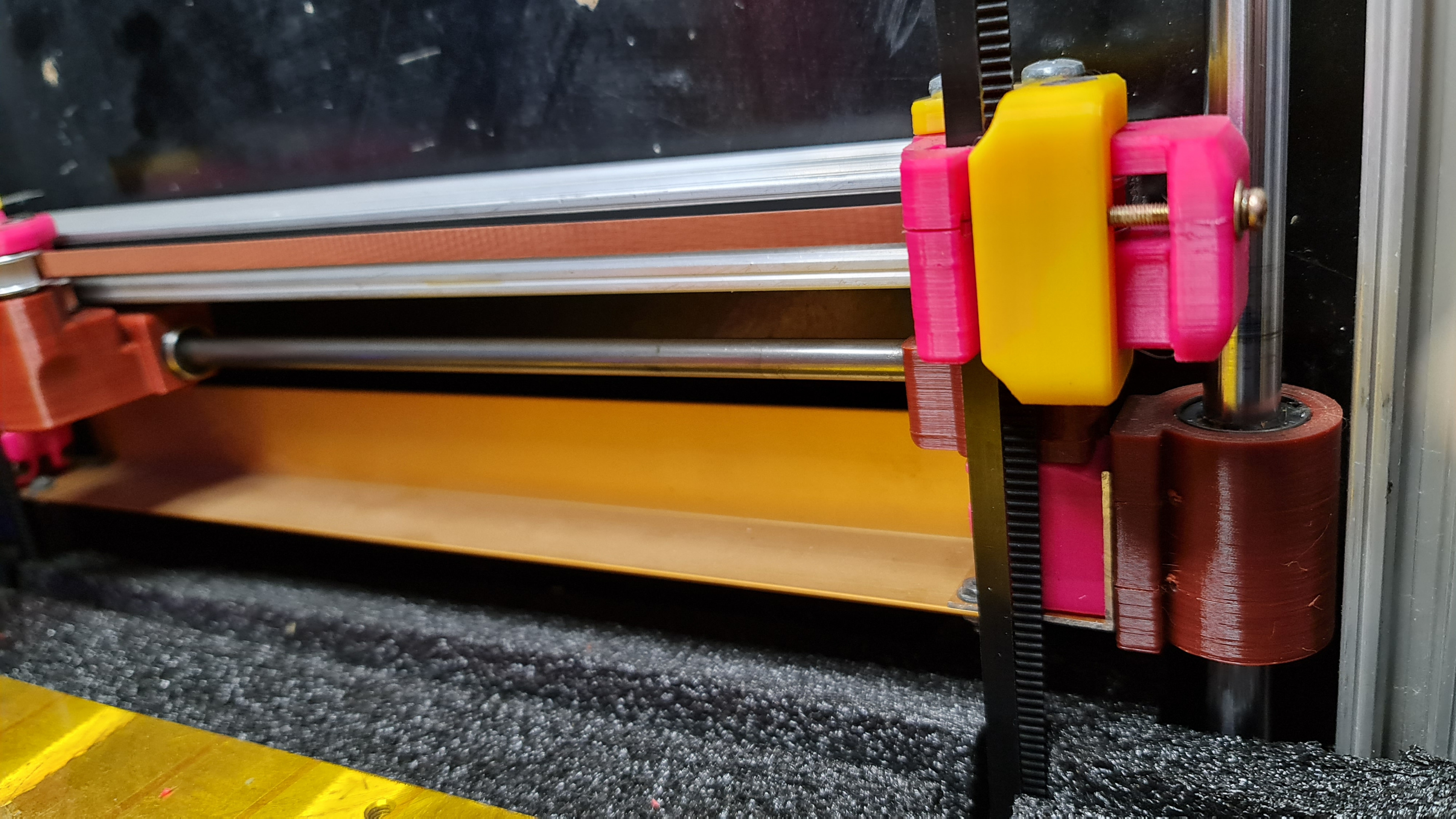
Replied by tommylight on topic 3D printed stuff, showcase it here
3D printed stuff, showcase it here
Category: Additive Manufacturing




")
- gardenweazel

09 Jul 2024 23:35
- rodw

09 Jul 2024 23:33
Replied by rodw on topic Spindle Inhibit while Probing.....
Spindle Inhibit while Probing.....
Category: Qtvcp
- rodw
09 Jul 2024 23:27
Replied by rodw on topic EtherCat - CATIO module Help
EtherCat - CATIO module Help
Category: EtherCAT
- tommylight
09 Jul 2024 23:20
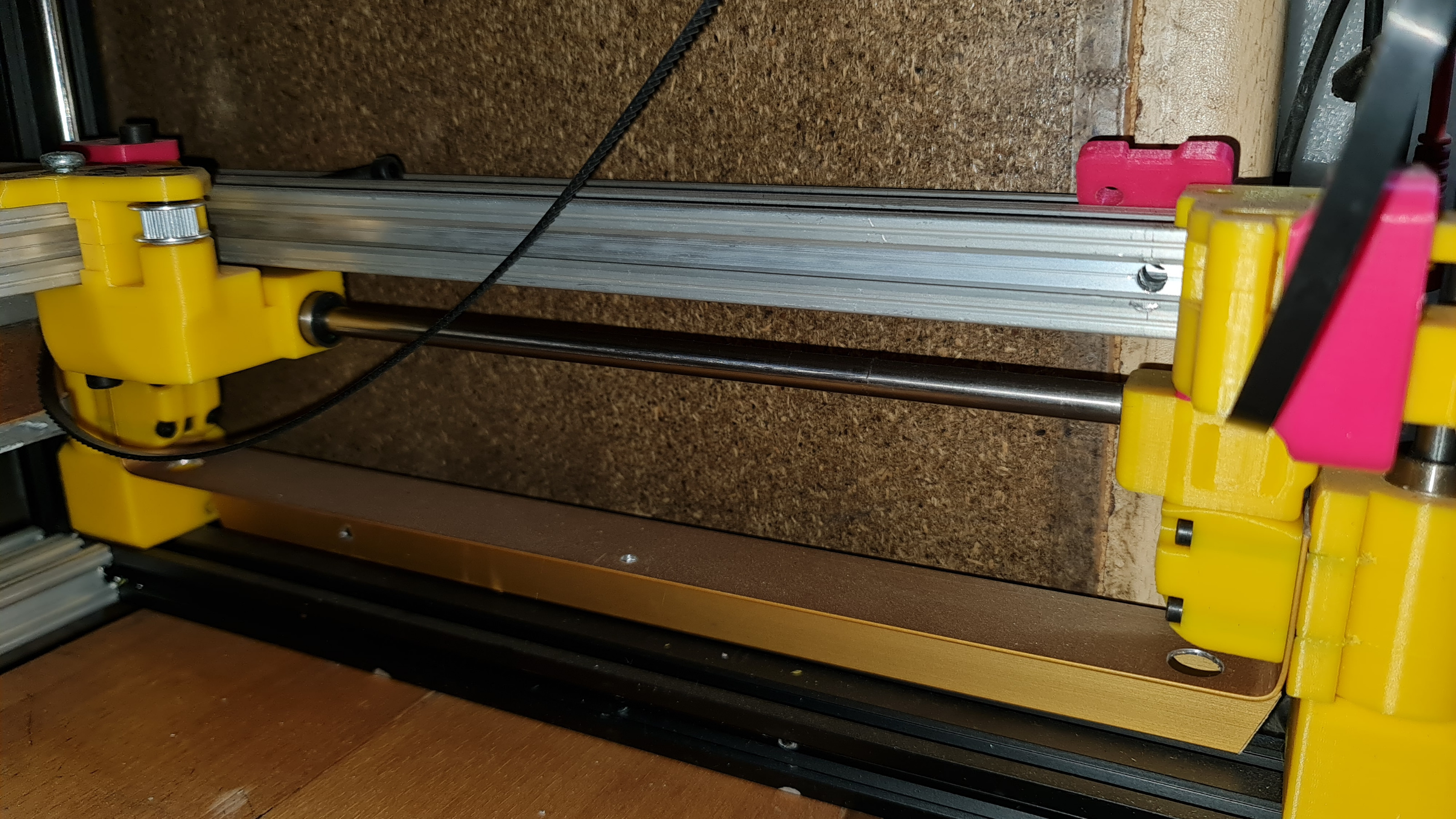
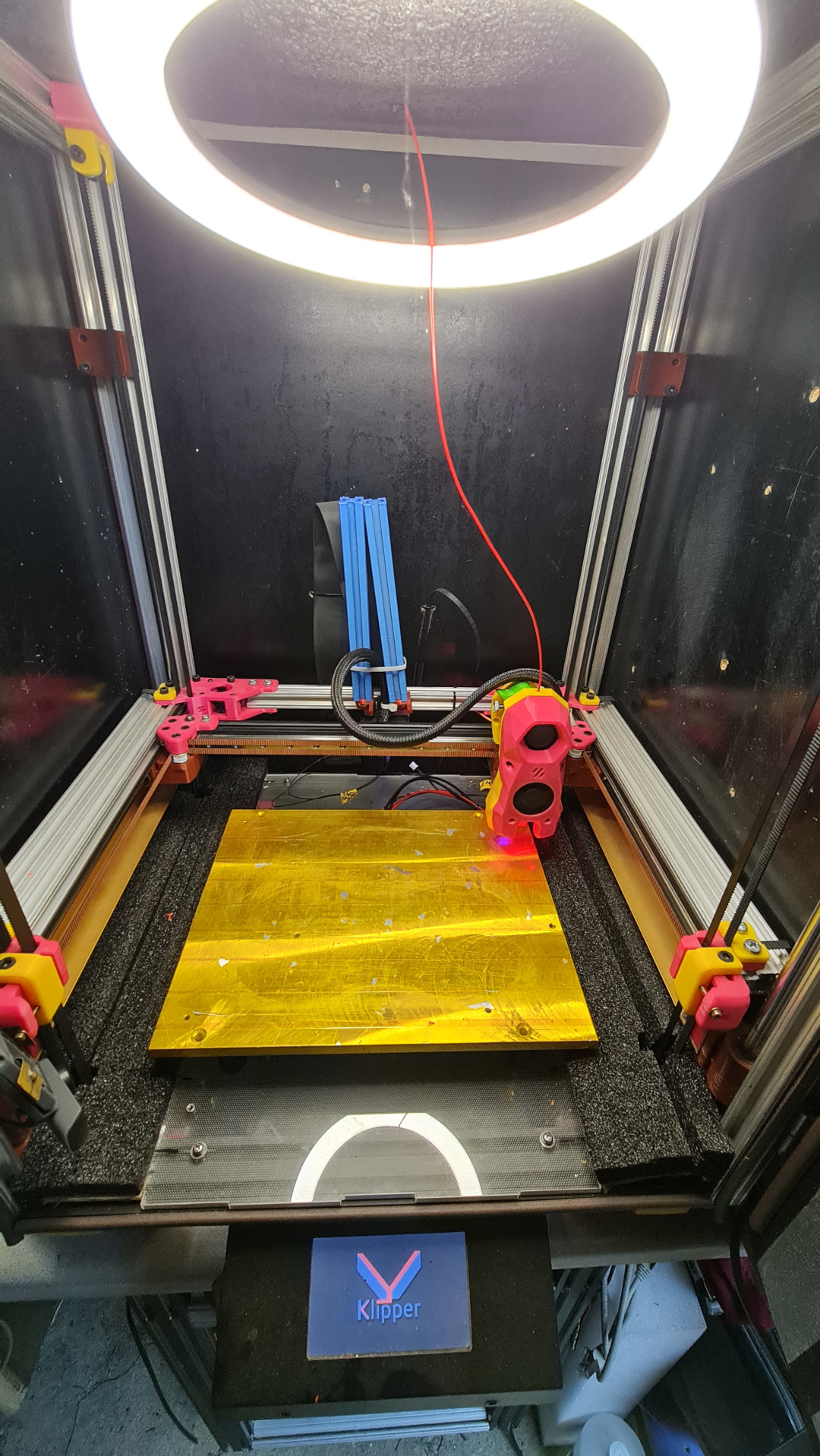
Replied by tommylight on topic 3D printed stuff, showcase it here
3D printed stuff, showcase it here
Category: Additive Manufacturing
- Dorro1971
- Dorro1971
09 Jul 2024 23:04
- Pro_El

09 Jul 2024 21:04
Replied by Pro_El on topic EtherCat - CATIO module Help
EtherCat - CATIO module Help
Category: EtherCAT
Time to create page: 1.803 seconds