Search Results (Searched for: )
- PCW

14 May 2024 02:21
- COFHAL
- COFHAL
14 May 2024 02:04 - 14 May 2024 02:05
Replied by COFHAL on topic Mesa modbus and pktUart
Mesa modbus and pktUart
Category: Other User Interfaces
- blazini36
- blazini36
14 May 2024 01:57
- blazini36
- blazini36
14 May 2024 00:10
Replied by blazini36 on topic Looking for suggestions on a better CAD/CAM program.
Looking for suggestions on a better CAD/CAM program.
Category: CAD CAM
- PCW
14 May 2024 00:03
- PCW
13 May 2024 23:54
Replied by PCW on topic Reassign Breakout Board pins in PathPilot?
Reassign Breakout Board pins in PathPilot?
Category: PathPilot
- cakeslob
- cakeslob
13 May 2024 23:31
Replied by cakeslob on topic Need help in choosing controller board from small honby cnc.
Need help in choosing controller board from small honby cnc.
Category: Driver Boards
- blazini36
- blazini36
13 May 2024 23:22
- Whitebarn
- Whitebarn
13 May 2024 23:13
Reassign Breakout Board pins in PathPilot? was created by Whitebarn
Reassign Breakout Board pins in PathPilot?
Category: PathPilot
- blazini36
- blazini36
13 May 2024 22:03
Replied by blazini36 on topic Announcing Deckard: StreamDeck support for LinuxCNC
Announcing Deckard: StreamDeck support for LinuxCNC
Category: Show Your Stuff
- tommylight

13 May 2024 21:42
Replied by tommylight on topic servo motor are jittering
servo motor are jittering
Category: General LinuxCNC Questions
- blazini36
- blazini36
13 May 2024 21:42
Replied by blazini36 on topic Announcing Deckard: StreamDeck support for LinuxCNC
Announcing Deckard: StreamDeck support for LinuxCNC
Category: Show Your Stuff
- PCW
13 May 2024 21:37
Replied by PCW on topic servo motor are jittering
servo motor are jittering
Category: General LinuxCNC Questions
- tommylight
13 May 2024 21:37
Replied by tommylight on topic servo motor are jittering
servo motor are jittering
Category: General LinuxCNC Questions
")
- tommylight
13 May 2024 21:32
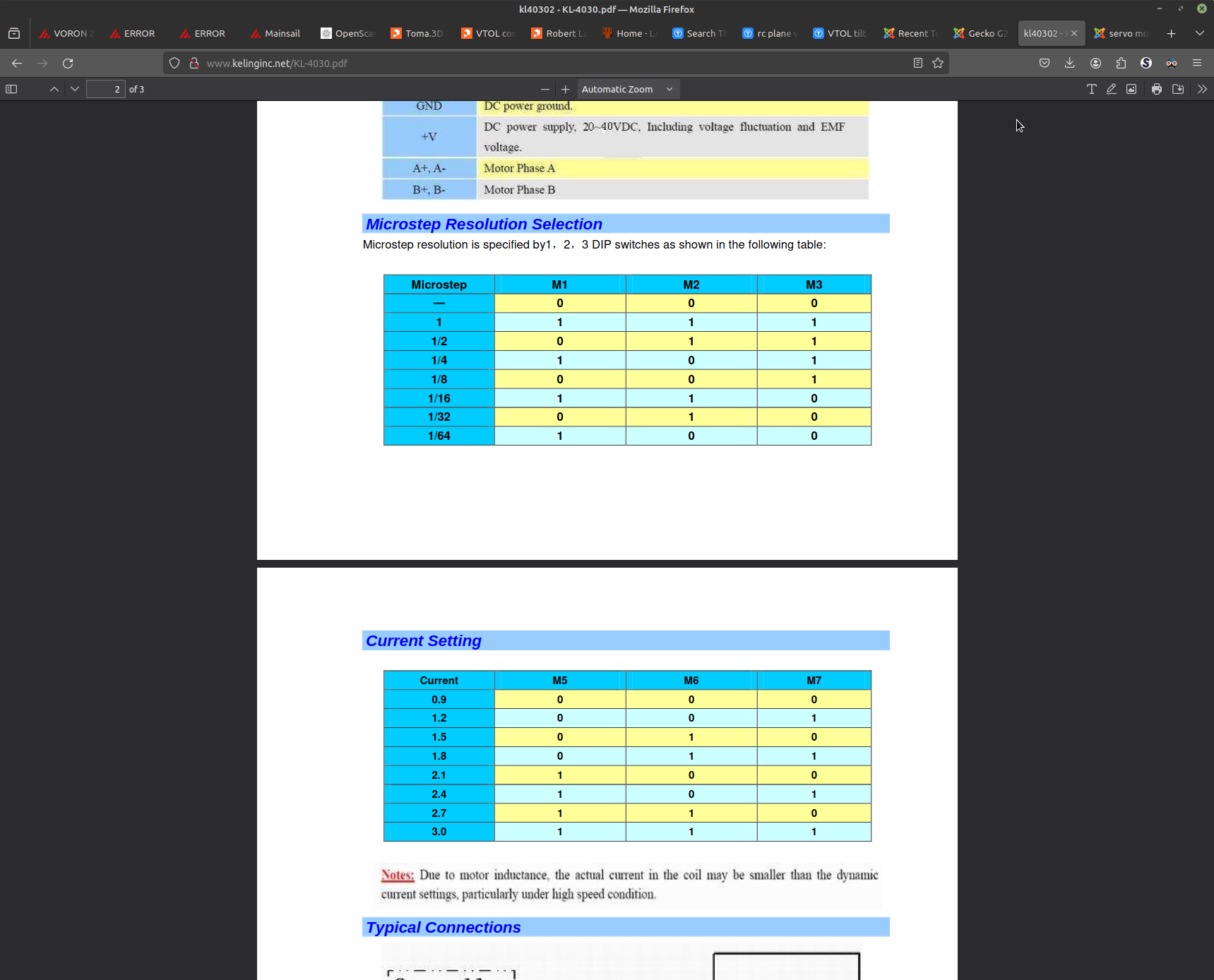
Replied by tommylight on topic Gecko G251x step/dir drives
Gecko G251x step/dir drives
Category: Milling Machines
Time to create page: 0.499 seconds