Search Results (Searched for: )
- AlessandroEmm
- AlessandroEmm
17 Feb 2026 19:20 - 17 Feb 2026 19:48
Replied by AlessandroEmm on topic Remora - Rpi Software Stepping Using External Microcontroller via SPI
Remora - Rpi Software Stepping Using External Microcontroller via SPI
Category: Computers and Hardware
- 2tinker
- 2tinker
17 Feb 2026 19:18
- tuxcnc
- tuxcnc
17 Feb 2026 18:56
Replied by tuxcnc on topic EtherCAT driver as simply positioner
EtherCAT driver as simply positioner
Category: EtherCAT
- PCW

17 Feb 2026 18:55
Replied by PCW on topic HURCO KMB-1 Control Update
HURCO KMB-1 Control Update
Category: Milling Machines
- PCW
17 Feb 2026 18:50
Replied by PCW on topic Configure Mesa 7i96s and pktuart with Omron MX2 (wj200)
Configure Mesa 7i96s and pktuart with Omron MX2 (wj200)
Category: Advanced Configuration
- amanker
- amanker
17 Feb 2026 18:49
Replied by amanker on topic Remora - Rpi Software Stepping Using External Microcontroller via SPI
Remora - Rpi Software Stepping Using External Microcontroller via SPI
Category: Computers and Hardware
- Finngineering
- Finngineering
17 Feb 2026 18:45
Replied by Finngineering on topic XHC WHB04B development?
XHC WHB04B development?
Category: General LinuxCNC Questions
- DerKlotz
- DerKlotz
17 Feb 2026 18:35
Replied by DerKlotz on topic Add Buttons in Probe Basic
Add Buttons in Probe Basic
Category: QtPyVCP
- AlessandroEmm
- AlessandroEmm
17 Feb 2026 18:30
Replied by AlessandroEmm on topic Remora - Rpi Software Stepping Using External Microcontroller via SPI
Remora - Rpi Software Stepping Using External Microcontroller via SPI
Category: Computers and Hardware
- Hakan
- Hakan
17 Feb 2026 18:26
Replied by Hakan on topic XHC WHB04B development?
XHC WHB04B development?
Category: General LinuxCNC Questions
- Stephan@work
- Stephan@work
17 Feb 2026 18:16
Replied by Stephan@work on topic Configure Mesa 7i96s and pktuart with Omron MX2 (wj200)
Configure Mesa 7i96s and pktuart with Omron MX2 (wj200)
Category: Advanced Configuration
 )
)- andrax

17 Feb 2026 17:55
- Finngineering
- Finngineering
17 Feb 2026 16:13
Replied by Finngineering on topic XHC WHB04B development?
XHC WHB04B development?
Category: General LinuxCNC Questions
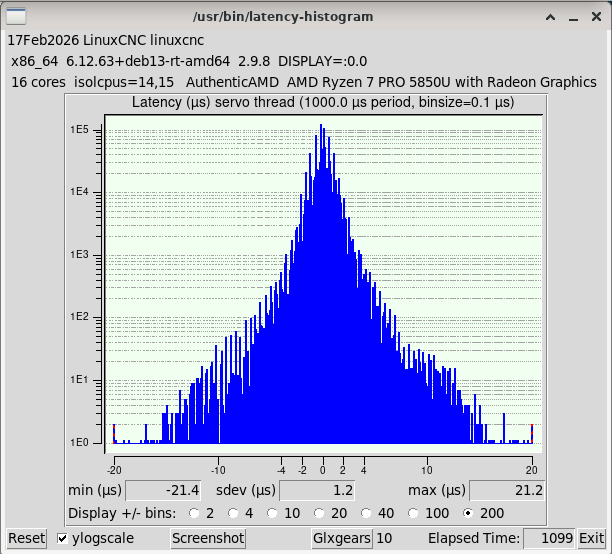
- NWE

17 Feb 2026 16:08
Replied by NWE on topic Lenovo T14 Gen2 AMD - CRAZY High Latency - Am I screwed?
Lenovo T14 Gen2 AMD - CRAZY High Latency - Am I screwed?
Category: Computers and Hardware
- Looby
- Looby
17 Feb 2026 15:01
Replied by Looby on topic Lenovo T14 Gen2 AMD - CRAZY High Latency - Am I screwed?
Lenovo T14 Gen2 AMD - CRAZY High Latency - Am I screwed?
Category: Computers and Hardware
Time to create page: 0.416 seconds