Search Results (Searched for: )
- Lcvette

17 Feb 2026 00:47 - 17 Feb 2026 00:49
- tuxcnc
- tuxcnc
17 Feb 2026 00:06
Replied by tuxcnc on topic EtherCAT driver as simply positioner
EtherCAT driver as simply positioner
Category: EtherCAT
- Marcos DC

16 Feb 2026 23:40
Replied by Marcos DC on topic Technical questions about CIA402 and homecomp.comp on A6
Technical questions about CIA402 and homecomp.comp on A6
Category: EtherCAT
- andrax

16 Feb 2026 21:42
Replied by andrax on topic Error combining cutter compensation (G41/42) with work offset (G55)
Error combining cutter compensation (G41/42) with work offset (G55)
Category: G&M Codes
- tuxcnc
- tuxcnc
16 Feb 2026 21:28
Replied by tuxcnc on topic EtherCAT driver as simply positioner
EtherCAT driver as simply positioner
Category: EtherCAT
- Ismacr63
- Ismacr63
16 Feb 2026 21:27
Replied by Ismacr63 on topic Some problems with probe basic lathe
Some problems with probe basic lathe
Category: QtPyVCP
- RotarySMP

16 Feb 2026 21:17
Replied by RotarySMP on topic Error combining cutter compensation (G41/42) with work offset (G55)
Error combining cutter compensation (G41/42) with work offset (G55)
Category: G&M Codes
- COFHAL
- COFHAL
16 Feb 2026 20:34
- meister
- meister
16 Feb 2026 20:22
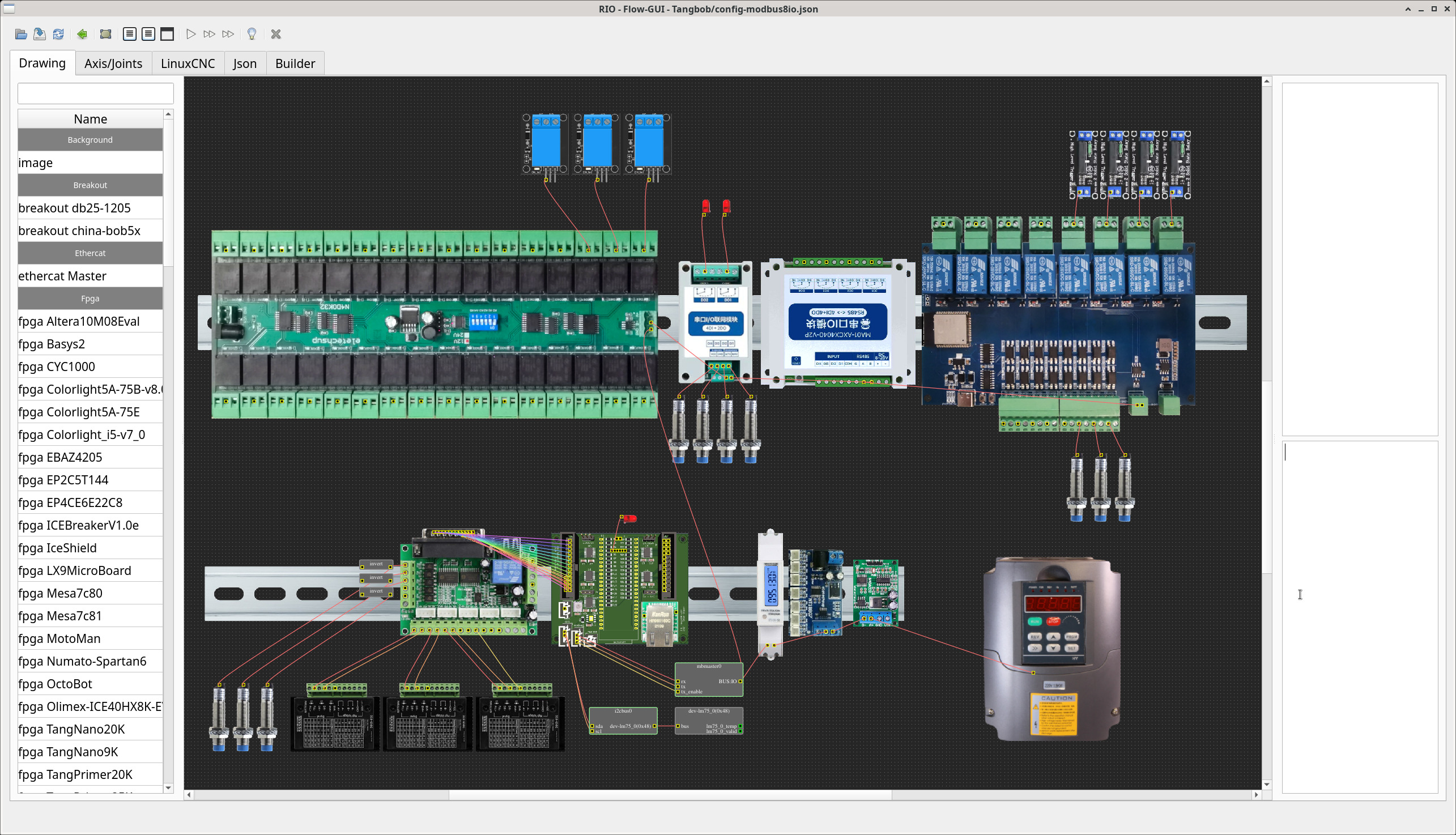
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
")
- PCW

16 Feb 2026 20:17 - 16 Feb 2026 20:39
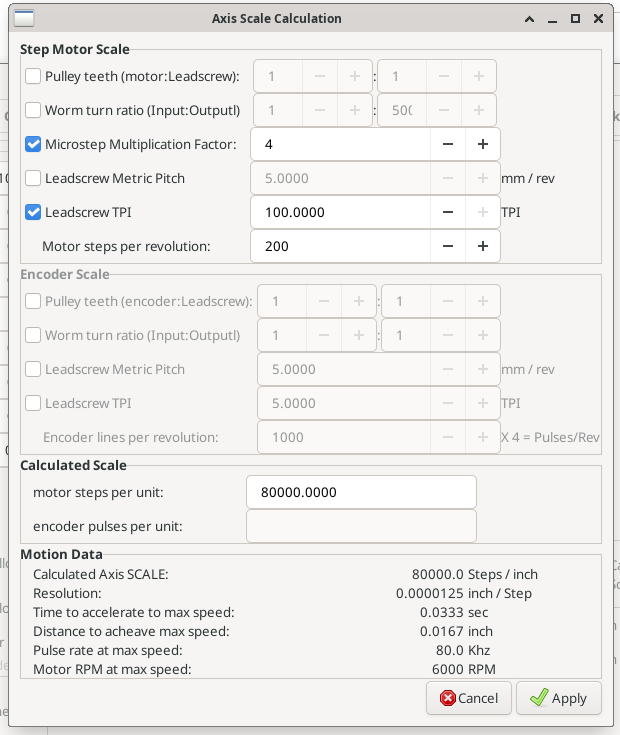
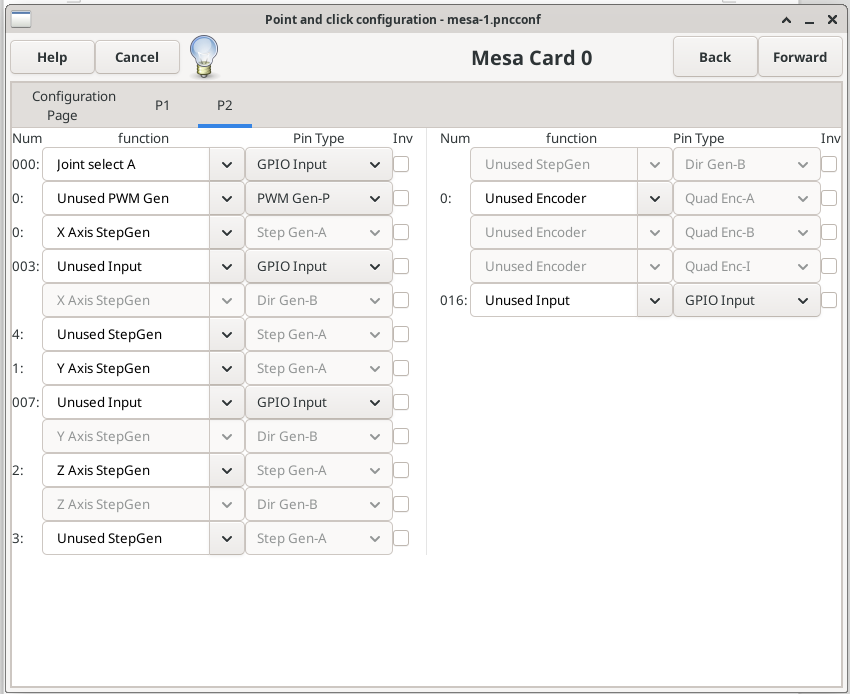
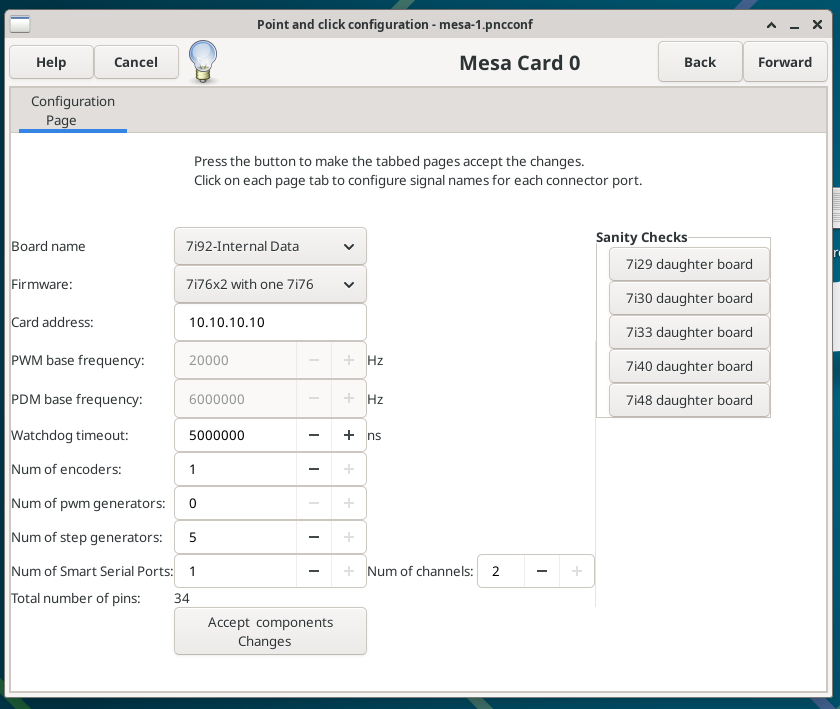
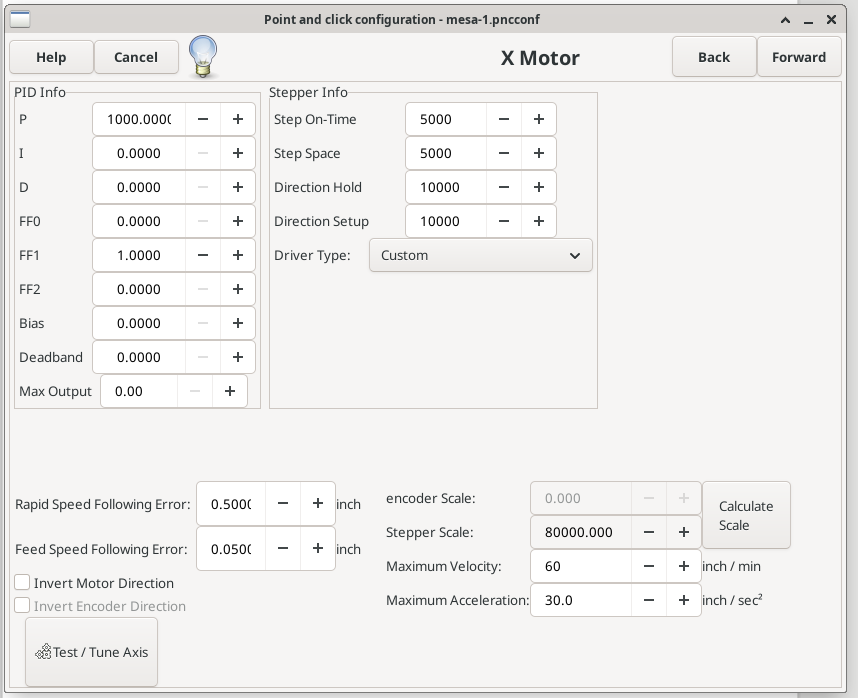
Replied by PCW on topic 7i92T and mx3660 request for help
7i92T and mx3660 request for help
Category: PnCConf Wizard
- Red_D85
- Red_D85
16 Feb 2026 20:03
- Hakan
- Hakan
16 Feb 2026 19:36
Replied by Hakan on topic EtherCAT driver as simply positioner
EtherCAT driver as simply positioner
Category: EtherCAT
- tuxcnc
- tuxcnc
16 Feb 2026 18:52
EtherCAT driver as simply positioner was created by tuxcnc
EtherCAT driver as simply positioner
Category: EtherCAT
- andrax
16 Feb 2026 18:43
Replied by andrax on topic Technical questions about CIA402 and homecomp.comp on A6
Technical questions about CIA402 and homecomp.comp on A6
Category: EtherCAT
- ClarkSavage
- ClarkSavage
16 Feb 2026 18:22
Replied by ClarkSavage on topic 7i92T and mx3660 request for help
7i92T and mx3660 request for help
Category: PnCConf Wizard
Time to create page: 0.697 seconds