Search Results (Searched for: )
- Ismacr63
- Ismacr63
14 Feb 2026 18:01 - 14 Feb 2026 18:03
Replied by Ismacr63 on topic Some problems with probe basic lathe
Some problems with probe basic lathe
Category: QtPyVCP
- Ismacr63
- Ismacr63
14 Feb 2026 17:06
Replied by Ismacr63 on topic Some problems with probe basic lathe
Some problems with probe basic lathe
Category: QtPyVCP
- smc.collins
- smc.collins
14 Feb 2026 17:03
- endian

14 Feb 2026 17:03
Replied by endian on topic LinuxCNC S-Curve Accelerations
LinuxCNC S-Curve Accelerations
Category: General LinuxCNC Questions
- Nathan40
- Nathan40
14 Feb 2026 16:32 - 14 Feb 2026 17:05
Replied by Nathan40 on topic Integrating a BCL-AMP capacitive sensor to LinuxCNC
Integrating a BCL-AMP capacitive sensor to LinuxCNC
Category: Plasma & Laser
- tommylight

14 Feb 2026 16:24
Replied by tommylight on topic Integrating a BCL-AMP capacitive sensor to LinuxCNC
Integrating a BCL-AMP capacitive sensor to LinuxCNC
Category: Plasma & Laser
- tommylight
14 Feb 2026 16:19
- PCW

14 Feb 2026 16:12
- decor82
- decor82
14 Feb 2026 15:59
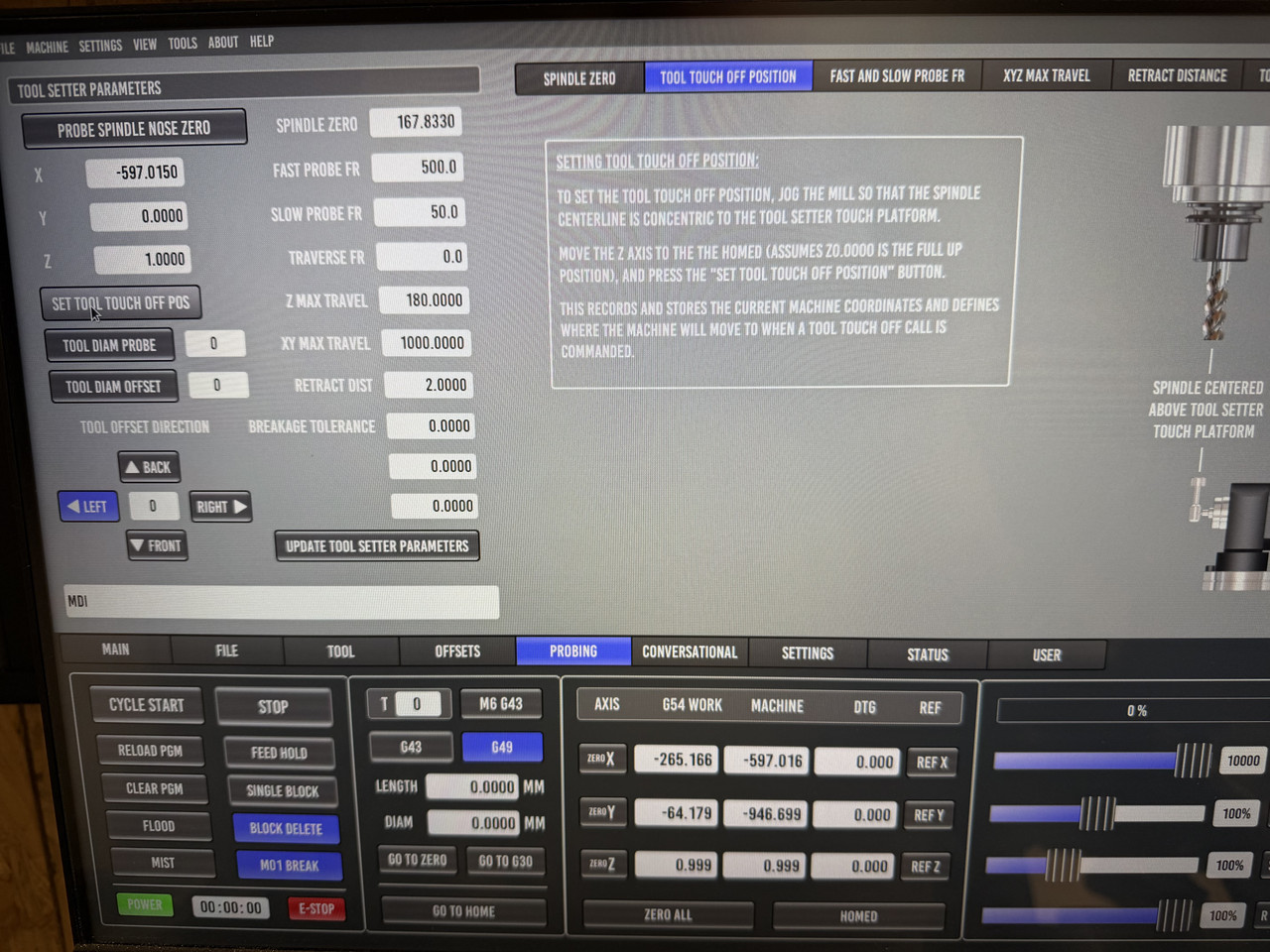
Probe Basic Tool Setter touch off pos Y not set was created by decor82
Probe Basic Tool Setter touch off pos Y not set
Category: QtPyVCP
- Lcvette

14 Feb 2026 15:49
- Lcvette
14 Feb 2026 15:31
Replied by Lcvette on topic Some problems with probe basic lathe
Some problems with probe basic lathe
Category: QtPyVCP
- Hakan
- Hakan
14 Feb 2026 15:20
Replied by Hakan on topic Ver 2.9.4 iso clean install Trouble when disabling EOE
Ver 2.9.4 iso clean install Trouble when disabling EOE
Category: EtherCAT
- 5_Zylinder
- 5_Zylinder
14 Feb 2026 15:09
- Nathan40
- Nathan40
14 Feb 2026 14:55 - 14 Feb 2026 15:26
Replied by Nathan40 on topic Integrating a BCL-AMP capacitive sensor to LinuxCNC
Integrating a BCL-AMP capacitive sensor to LinuxCNC
Category: Plasma & Laser
- Aciera

14 Feb 2026 14:55
Time to create page: 0.764 seconds